STM32F407IGHX与Ubuntu20.04虚拟串口通信
为了让RobomasterC板(这块板用的是STM32F407IGHX的芯片)能与上位机进行通讯。我最近翻了不少博客和CSDN文章,看到了很多文章存在一些问题,经过了一下午试错,我成功实现了STM32F407IGHX利用STM32CubeIDE进行配置并然后用HAL库进行编程,与安装有ROS的Ubuntu进行虚拟串口通信。
在翻看博客的时候我发现,RM以及上下位机通信资料并不多,而且很多已有资料都只讲述了实现原理,却没有讲如何具体一步步实现某个功能,这就导致初学者可能在翻看过程中,越看越懵,反而写不出一份能用的代码。
所以这篇文章会尽可能详细的讲怎么实现串口通信,而尽量少讲其原理,由于很多文章都已经详尽的写出了串口通信的原理了,所以我就不在赘述原理而着重于实现过程。
此外,我也会把一些小问题和建议写出来,以便一篇文章就解决所有可能存在的问题。
一、概述
1、STM32端(所谓的下位机):这边采用的是通过有图形化的STM32CubeIDE配置工程,配置好USB-CDC创建一个虚拟串口,与上位机通信。
2、Ubuntu端(所谓的上位机):上位机是版本20.04的ubuntu,安装有版本为noetic的ROS,通过建立一个ROS节点来打开串口并建立通信。
二、STM32端具体实现过程
思路:利用STM32CubeIDE配置好USB-CDC,接着修改对应的头文件,自定义所需的函数。
1、配置过程
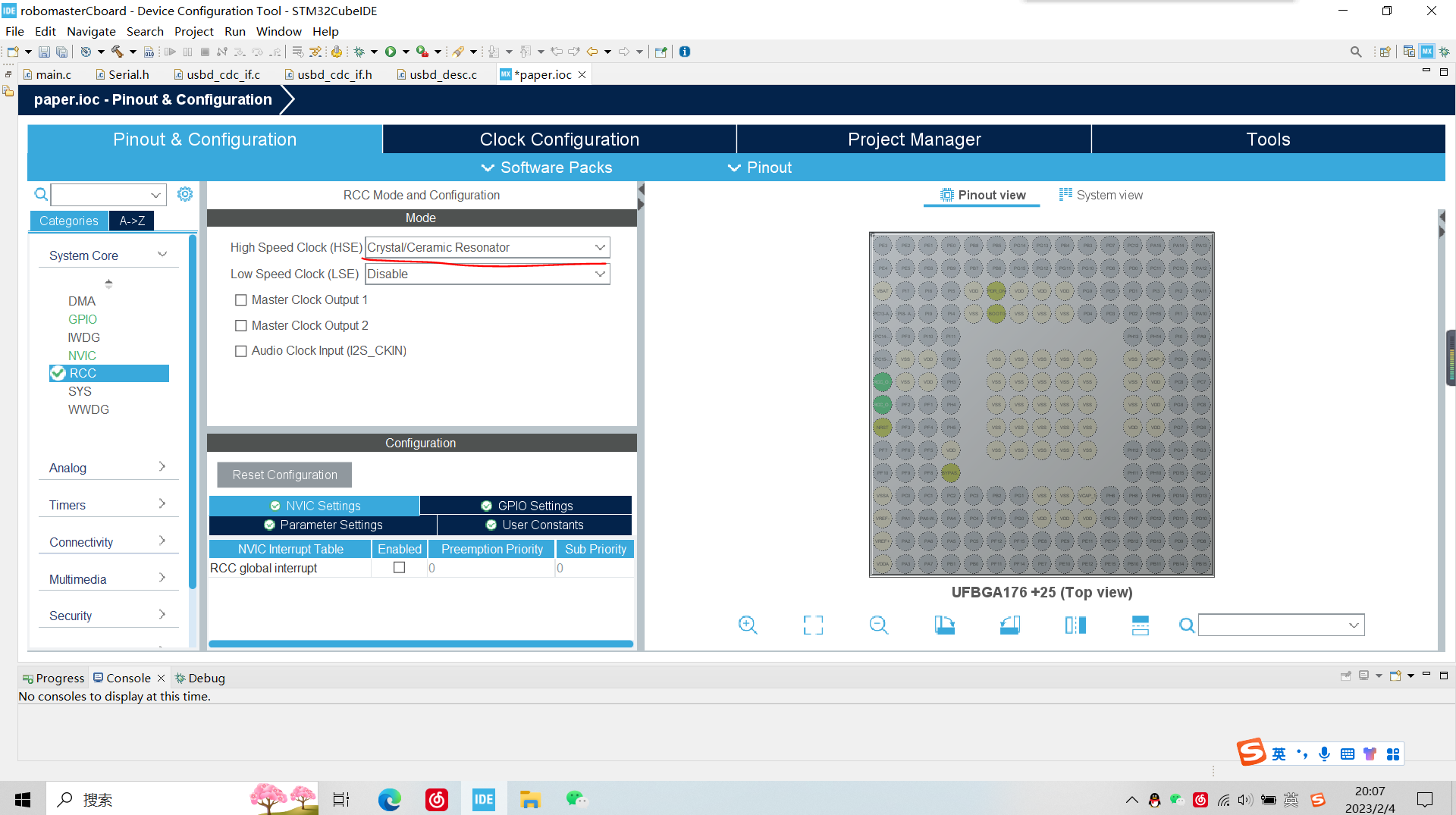
1)先配置时钟RCC,设置高速时钟High Speed Clock为内部时钟(Crystal/Ceramic Resonator),另一个暂时用不到所以不设置。
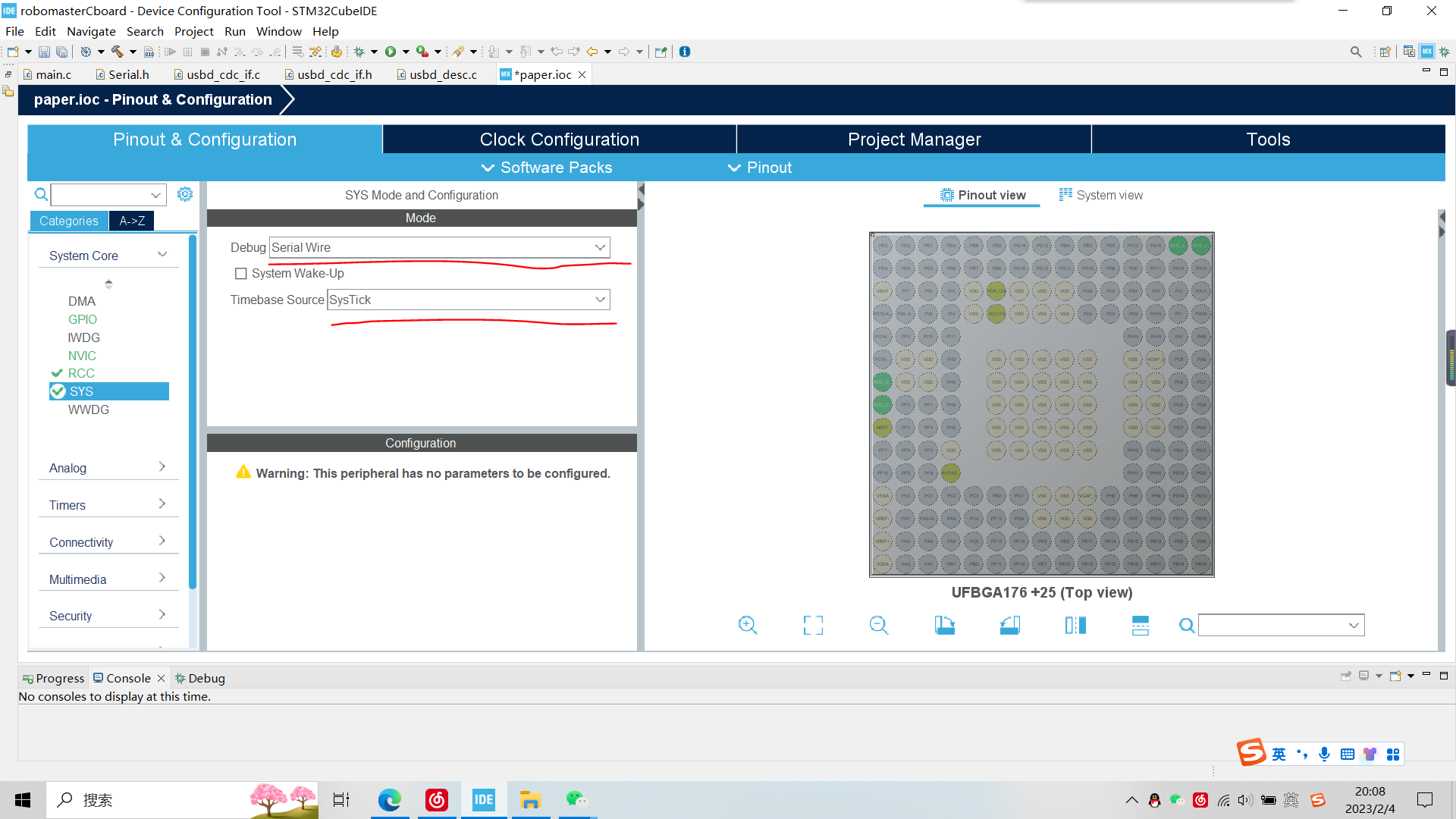
2)配置下载与调试(必须设置,否则会锁芯片,到时候还需要通过BOOT重启,比较麻烦)
设置为Serial Wire,时钟为SysTick(当然看你到底有什么,如果你拥有的是ST-LINK,那么可以这样设置)
3)设置USB模式,打开Connectivity,选择USB-OYG-FS(快速),选择Mode的Device_only(从机模式)。然后点开左下方的NVIC Settings,勾选Enabled,从而能够开启中断。
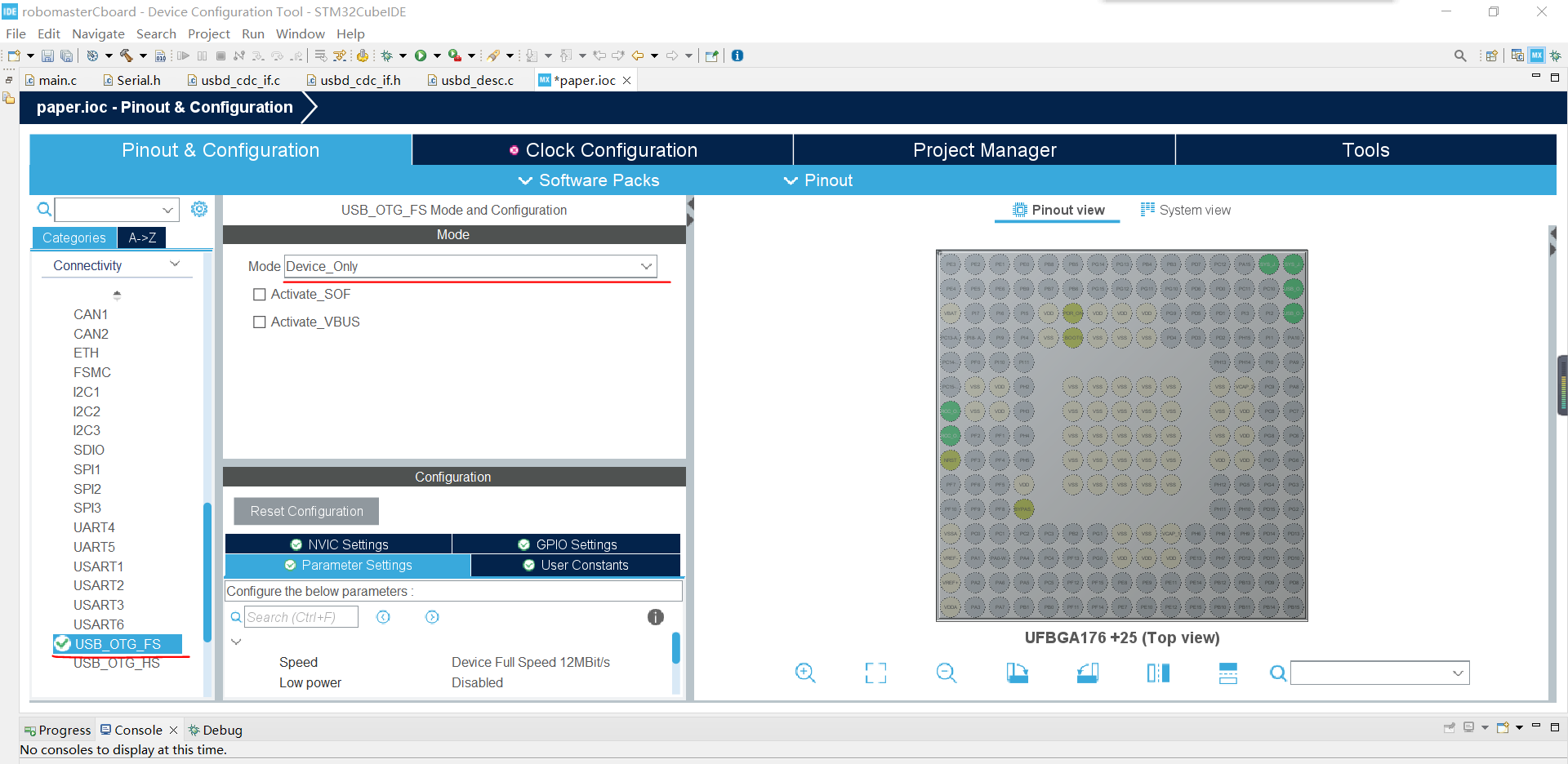

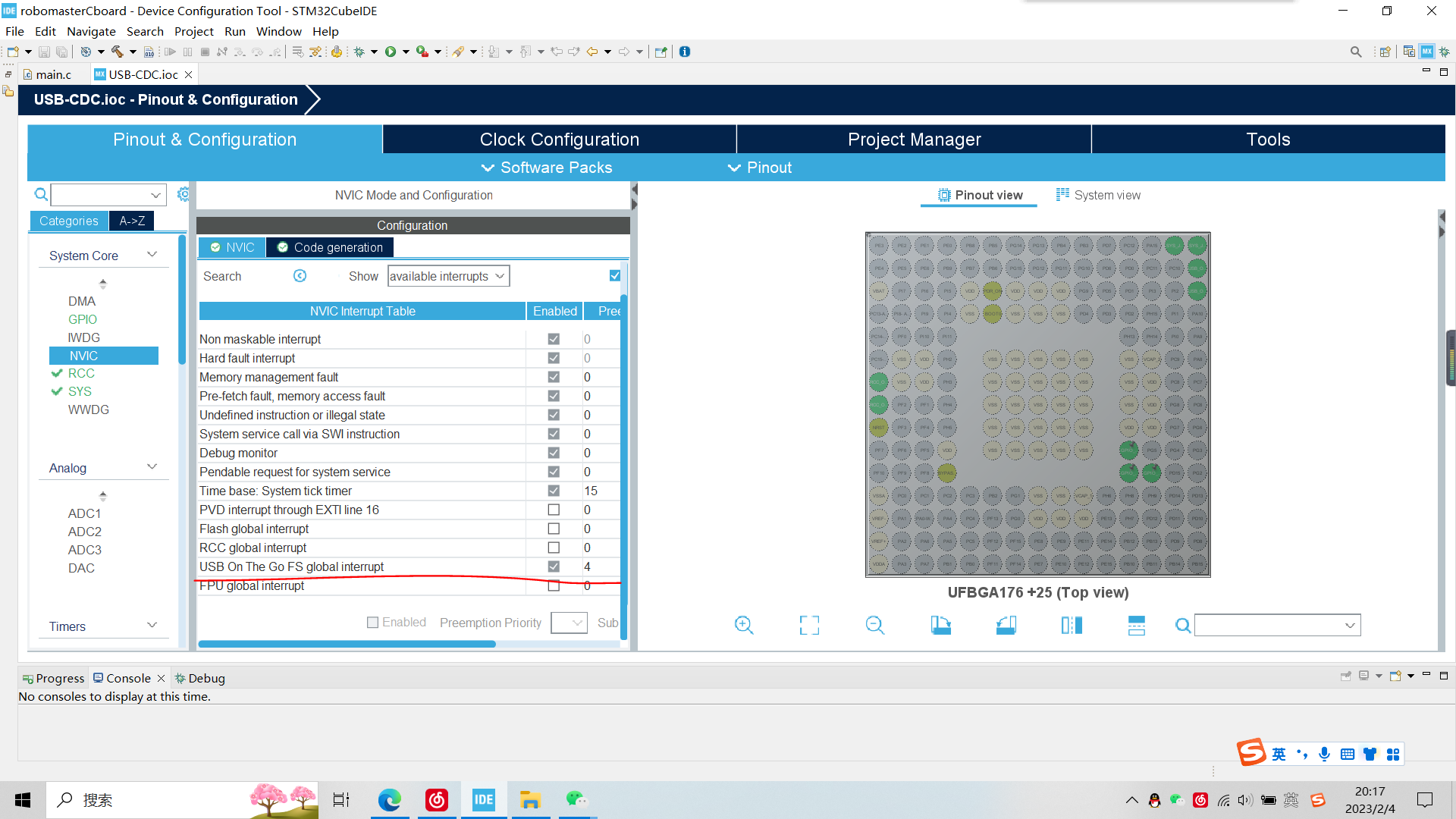
备注:还要返回到NVIC中,设置USB中断的优先级,这里设置个4就行(毕竟没有启动其他外设,所以中断就不需要太严谨)、
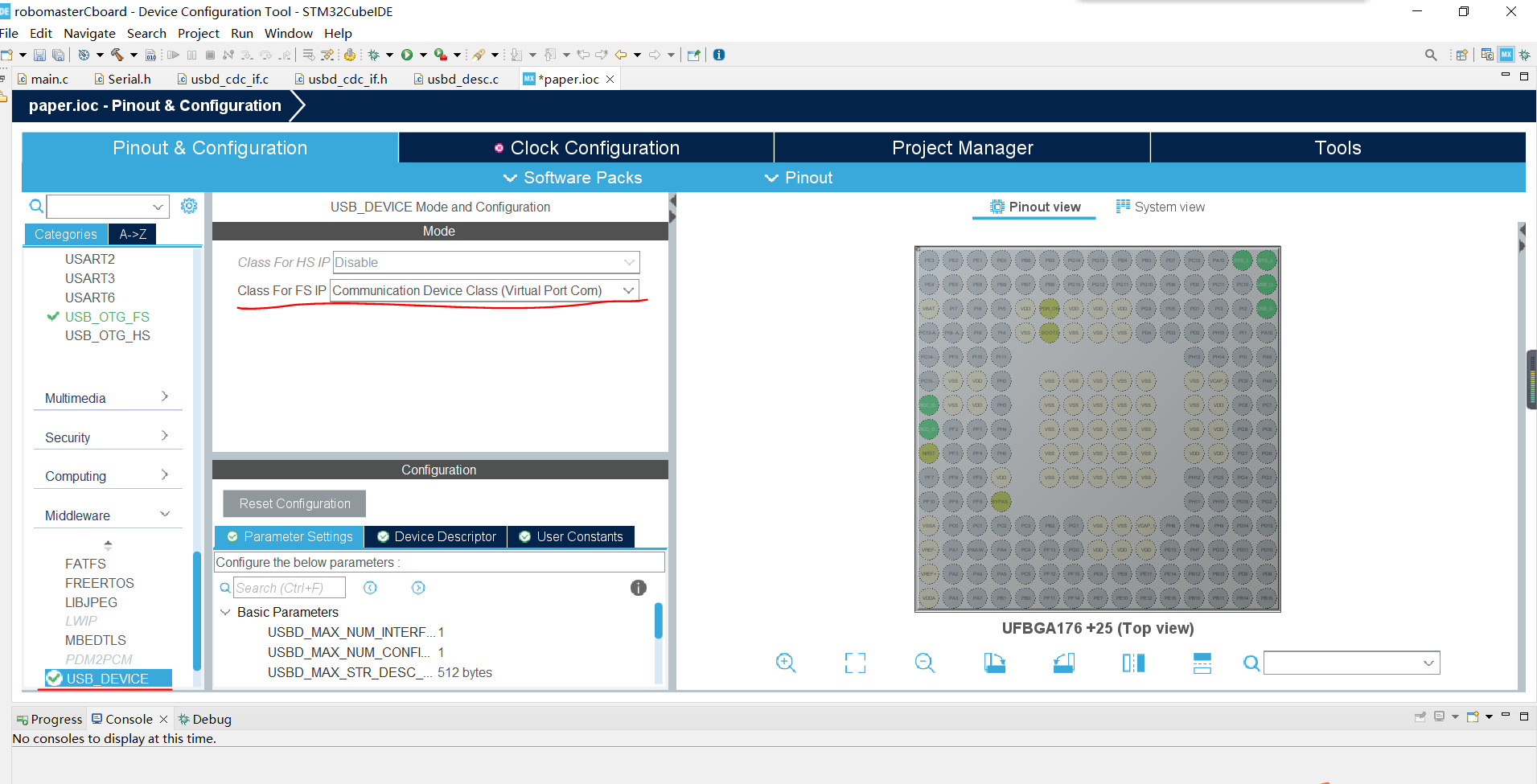
4)打开MiddleWare,设置USB的具体工作方式,选择Class For FS IP的Communication Device Class,即VCP(虚拟串口),其余设置保持默认即可,不需要额外修改。
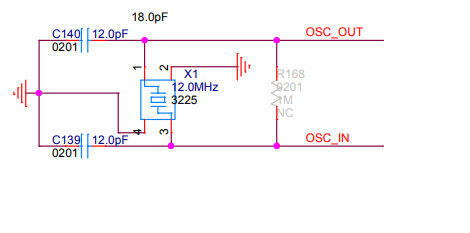
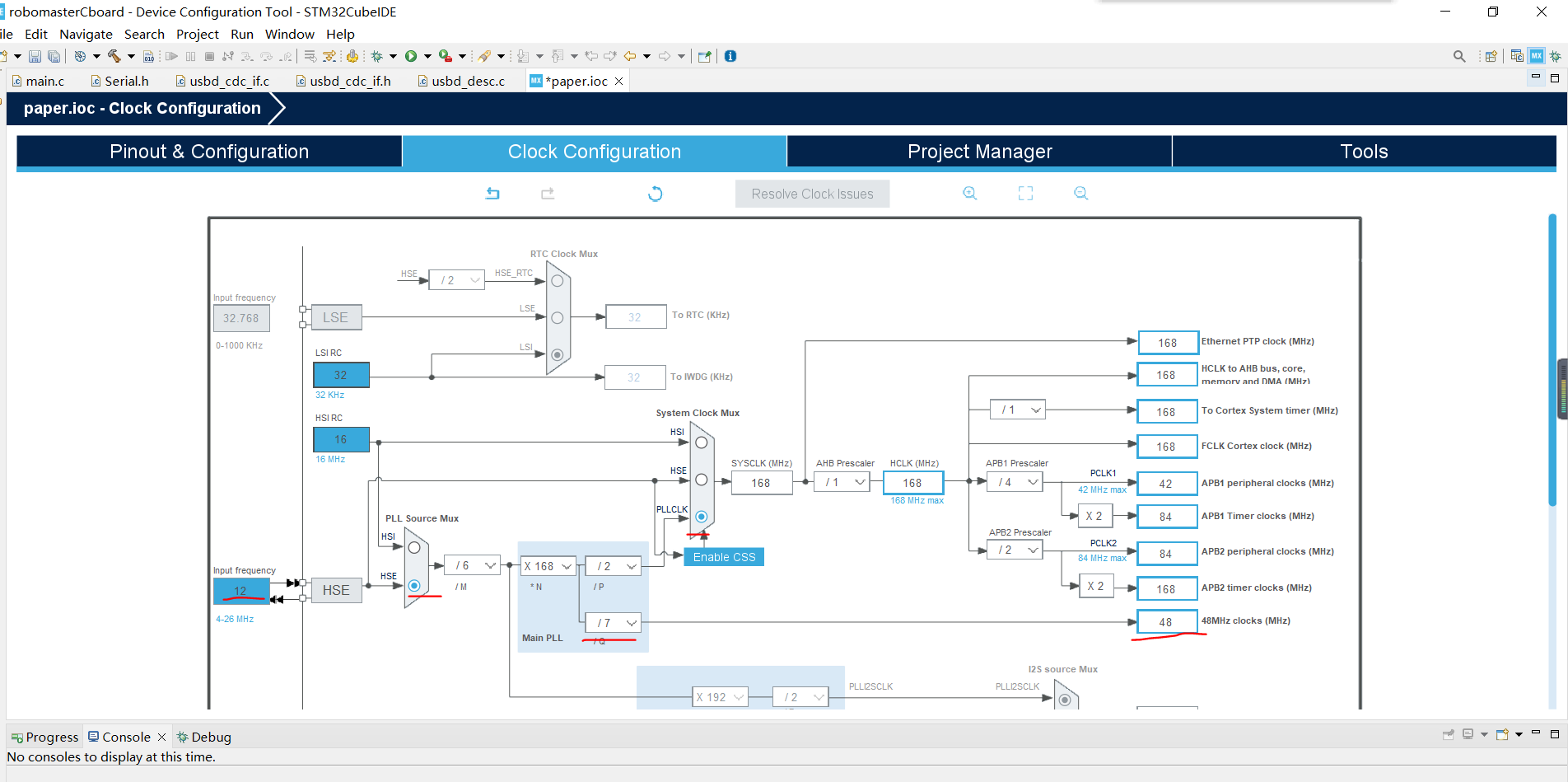
5)时钟树设置(时钟树的设置,需要查阅所使用开发板的具体原理图)
例如,RobomasterC板原理图里是如此说明的,所以Input frequency要设置成12MHz。此外,下方画红线部分是USB的时钟,USB的时钟需要设置成48MHz才能工作,其余部分看自己的需求。
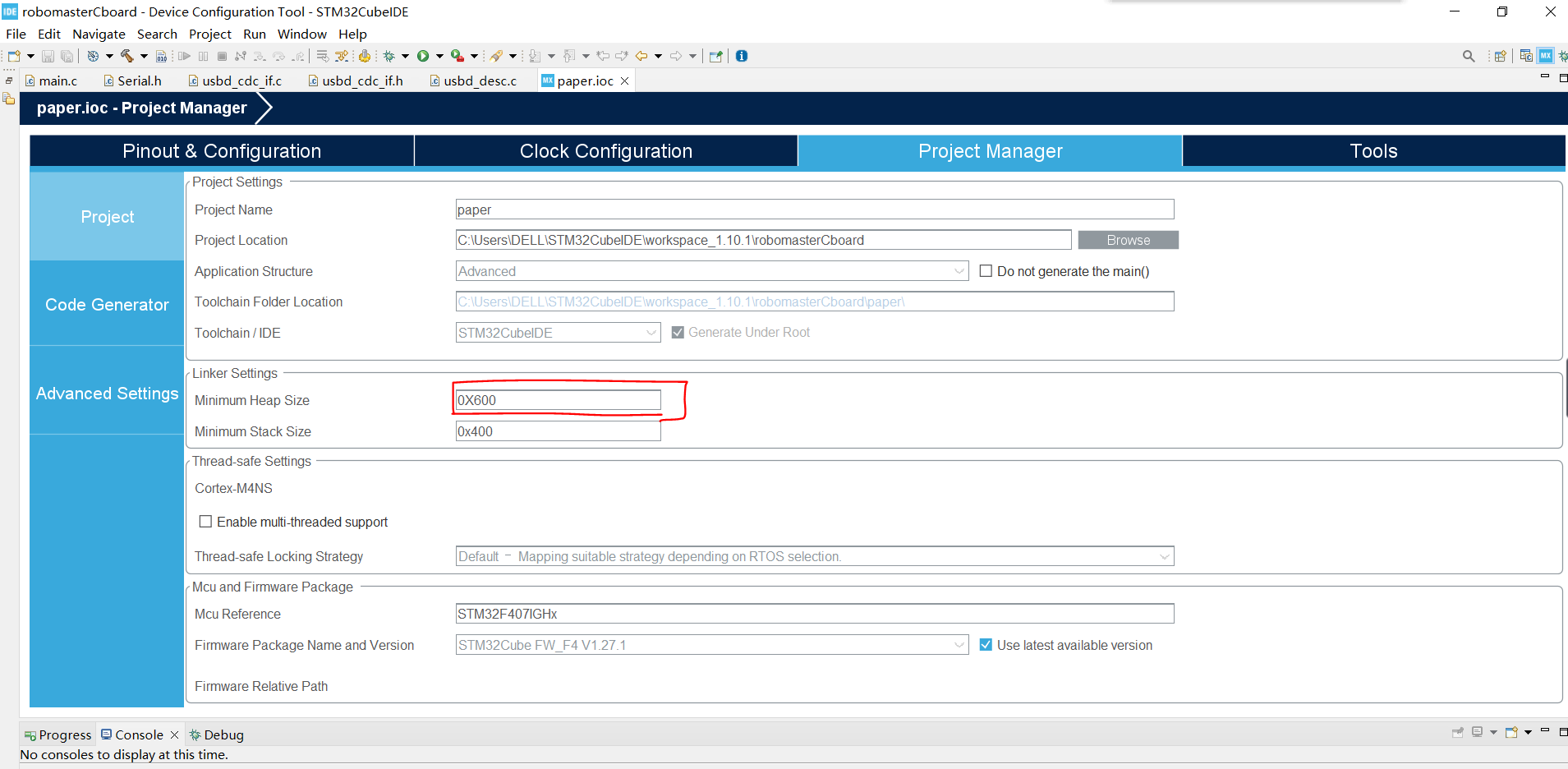
6)堆栈设置,堆栈的大小需要足够大,才能满足USB初始化的需求,此处设置Heap Size为0X600即可解决初始化失败的问题,另一个不用改。
7)到此,所有的初始化已经结束了,只需要Ctrl+s,保存并生成代码即可,下方两个选项均选择Yes,即可生成STM32CubeIDE工程
2、代码的修改
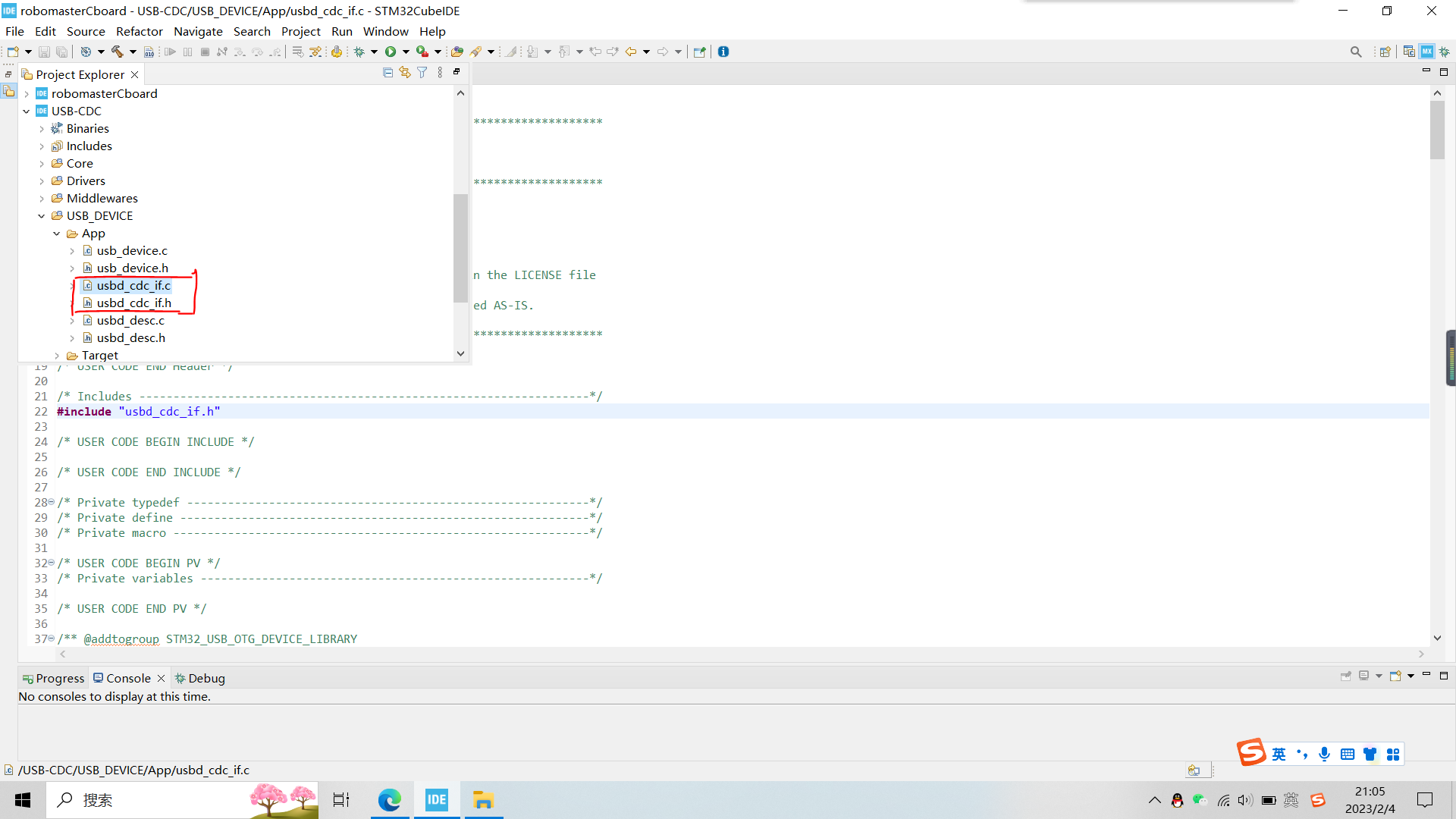
这里要先打开工程里的USB_DEVICE中的App的usbd_cdc_if.c,重构官方给出的代码,具体内容如下
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : usbd_cdc_if.c
* @version : v1.0_Cube
* @brief : Usb device for Virtual Com Port.
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include 'usbd_cdc_if.h'
/* USER CODE BEGIN INCLUDE */
/* USER CODE END INCLUDE */
/* Private typedef -----------------------------------------------------------*/
/* Private define ------------------------------------------------------------*/
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* Private variables ---------------------------------------------------------*/
/* USER CODE END PV */
/** @addtogroup STM32_USB_OTG_DEVICE_LIBRARY
* @brief Usb device library.
* @{
*/
/** @addtogroup USBD_CDC_IF
* @{
*/
/** @defgroup USBD_CDC_IF_Private_TypesDefinitions USBD_CDC_IF_Private_TypesDefinitions
* @brief Private types.
* @{
*/
/* USER CODE BEGIN PRIVATE_TYPES */
/* USER CODE END PRIVATE_TYPES */
/**
* @}
*/
/** @defgroup USBD_CDC_IF_Private_Defines USBD_CDC_IF_Private_Defines
* @brief Private defines.
* @{
*/
/* USER CODE BEGIN PRIVATE_DEFINES */
/* USER CODE END PRIVATE_DEFINES */
/**
* @}
*/
/** @defgroup USBD_CDC_IF_Private_Macros USBD_CDC_IF_Private_Macros
* @brief Private macros.
* @{
*/
/* USER CODE BEGIN PRIVATE_MACRO */
/* USER CODE END PRIVATE_MACRO */
/**
* @}
*/
/** @defgroup USBD_CDC_IF_Private_Variables USBD_CDC_IF_Private_Variables
* @brief Private variables.
* @{
*/
/* Create buffer for reception and transmission */
/* It's up to user to redefine and/or remove those define */
/** Received data over USB are stored in this buffer */
uint8_t UserRxBufferFS[APP_RX_DATA_SIZE];
/** Data to send over USB CDC are stored in this buffer */
uint8_t UserTxBufferFS[APP_TX_DATA_SIZE];
/* USER CODE BEGIN PRIVATE_VARIABLES */
/* USER CODE END PRIVATE_VARIABLES */
/**
* @}
*/
/** @defgroup USBD_CDC_IF_Exported_Variables USBD_CDC_IF_Exported_Variables
* @brief Public variables.
* @{
*/
extern USBD_HandleTypeDef hUsbDeviceFS;
/* USER CODE BEGIN EXPORTED_VARIABLES */
/* USER CODE END EXPORTED_VARIABLES */
/**
* @}
*/
/** @defgroup USBD_CDC_IF_Private_FunctionPrototypes USBD_CDC_IF_Private_FunctionPrototypes
* @brief Private functions declaration.
* @{
*/
static int8_t CDC_Init_FS(void);
static int8_t CDC_DeInit_FS(void);
static int8_t CDC_Control_FS(uint8_t cmd, uint8_t* pbuf, uint16_t length);
static int8_t CDC_Receive_FS(uint8_t* pbuf, uint32_t *Len);
static int8_t CDC_TransmitCplt_FS(uint8_t *pbuf, uint32_t *Len, uint8_t epnum);
/* USER CODE BEGIN PRIVATE_FUNCTIONS_DECLARATION */
/* USER CODE END PRIVATE_FUNCTIONS_DECLARATION */
/**
* @}
*/
USBD_CDC_ItfTypeDef USBD_Interface_fops_FS =
{
CDC_Init_FS,
CDC_DeInit_FS,
CDC_Control_FS,
CDC_Receive_FS,
CDC_TransmitCplt_FS
};
/* Private functions ---------------------------------------------------------*/
/**
* @brief Initializes the CDC media low layer over the FS USB IP
* @retval USBD_OK if all operations are OK else USBD_FAIL
*/
static int8_t CDC_Init_FS(void)
{
/* USER CODE BEGIN 3 */
/* Set Application Buffers */
USBD_CDC_SetTxBuffer(&hUsbDeviceFS, UserTxBufferFS, 0);
USBD_CDC_SetRxBuffer(&hUsbDeviceFS, UserRxBufferFS);
return (USBD_OK);
/* USER CODE END 3 */
}
/**
* @brief DeInitializes the CDC media low layer
* @retval USBD_OK if all operations are OK else USBD_FAIL
*/
static int8_t CDC_DeInit_FS(void)
{
/* USER CODE BEGIN 4 */
return (USBD_OK);
/* USER CODE END 4 */
}
/**
* @brief Manage the CDC class requests
* @param cmd: Command code
* @param pbuf: Buffer containing command data (request parameters)
* @param length: Number of data to be sent (in bytes)
* @retval Result of the operation: USBD_OK if all operations are OK else USBD_FAIL
*/
static int8_t CDC_Control_FS(uint8_t cmd, uint8_t* pbuf, uint16_t length)
{
/* USER CODE BEGIN 5 */
switch(cmd)
{
case CDC_SEND_ENCAPSULATED_COMMAND:
break;
case CDC_GET_ENCAPSULATED_RESPONSE:
break;
case CDC_SET_COMM_FEATURE:
break;
case CDC_GET_COMM_FEATURE:
break;
case CDC_CLEAR_COMM_FEATURE:
break;
/*******************************************************************************/
/* Line Coding Structure */
/*-----------------------------------------------------------------------------*/
/* Offset | Field | Size | Value | Description */
/* 0 | dwDTERate | 4 | Number |Data terminal rate, in bits per second*/
/* 4 | bCharFormat | 1 | Number | Stop bits */
/* 0 - 1 Stop bit */
/* 1 - 1.5 Stop bits */
/* 2 - 2 Stop bits */
/* 5 | bParityType | 1 | Number | Parity */
/* 0 - None */
/* 1 - Odd */
/* 2 - Even */
/* 3 - Mark */
/* 4 - Space */
/* 6 | bDataBits | 1 | Number Data bits (5, 6, 7, 8 or 16). */
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。