使用XR806联调控制四足马术机器人
来源: 电子工程世界
新闻行业新闻
1项目介绍
四足马术机器人
本项目使用XR806串口协议与大疆A板的stm32通讯,实现并联四足机器人的单腿运动学逆解与整体步态规划,本文将讲解项目所涉及的算法以及代码实现步骤。

四足马术机器人实物
2单腿运动学逆解
相关算法
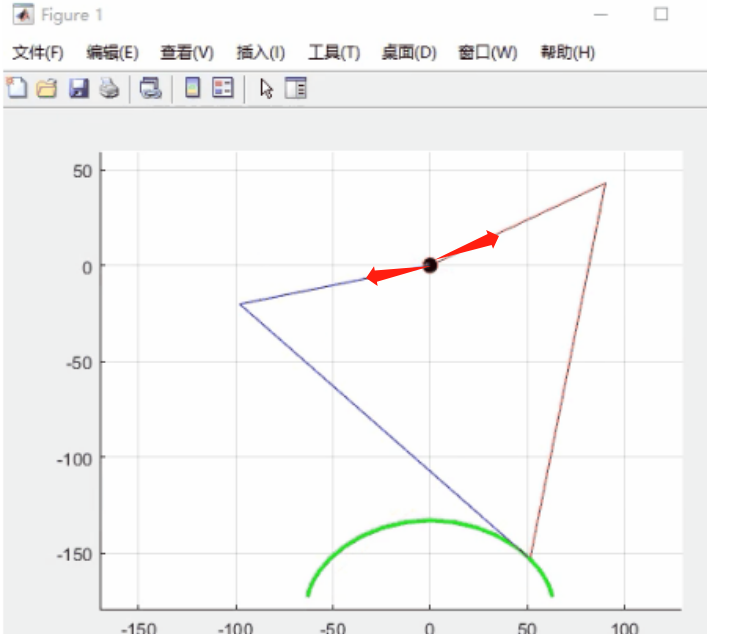
控制2个无刷电机(红色箭头各代表一个电机控制)并联成单足,经过角度闭环解算出足端轨迹,由足端做摆线轨迹(下图中绿色部分)形成类似于动物猫狗等单腿的运动
%摆线方程(matlab) sigma=2*pi*t/(Ts); xep=(xf-xs)*((sigma-sin(sigma))/(2*pi))+xs; zep=h*(1-cos(sigma))/2+zs; x=[x,xep]; z=[z,zep];
3整体步态规划
相关算法
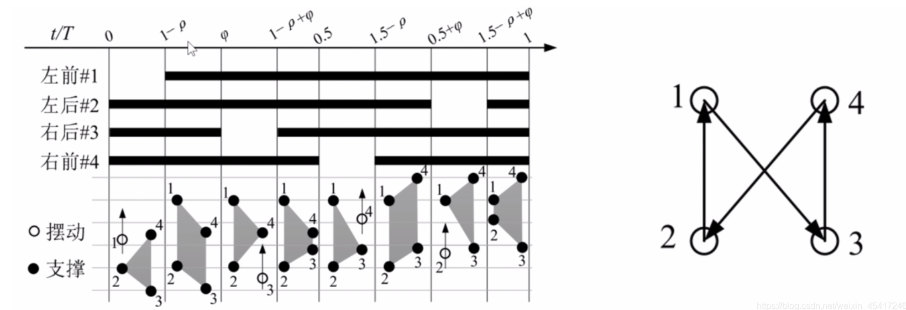
Walk步态是一种静态步态,即在运动过程中始终有三条腿处于支撑相,至多只有一条腿处于摆动相,四足动物在walk步态中四条腿最常见的轮换顺序为1→3→4→2→1。
4无刷电机角度速度
pid闭环
以P比例、I积分、D微分通过增量式PID使无刷电机能稳定的控制速度,角度使用pd控制函数如下
int Balance(float Angle,float Gyro,int Middle,float Balance_Kp,float Balance_Kd)
{
float Angle_bias,Gyro_bias;
int balance;
Angle_bias=Middle-Angle;
Gyro_bias=0-Gyro;
balance=Balance_Kp*Angle_bias+Gyro_bias*Balance_Kd;
return balance;
}
5关键功能实现
代码展示
XR806初始化串口配置:
if(HAL_UART_Init(UARTID, ¶m) != HAL_OK) return -1; /*使能DMA*/ if (HAL_UART_EnableTxDMA(UARTID) != HAL_OK) return -2; if (HAL_UART_EnableRxDMA(UARTID) != HAL_OK) return -3;
在main函数中while循环用下列函数发送对应数据:
HAL_UART_Transmit_DMA(UARTID, (uint8_t *)buffer,sizeof(buffer));
串口3接收回调,执行难对应的前进后退:
switch(RxBuffer_control)
{
case 'W': Motor_Control( 1, 1, 1, 1); break;
case 'S': Motor_Control(-1, -1, -1, -1); break;
case 'A': Motor_Control(-1, -1, 1, 1); break;
case 'D': Motor_Control( 1, 1, -1, -1); break;
case 'P': Motor_Control( 0, 0, 0, 0); break;
}
文章来源于: 电子工程世界原文链接
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。