不管设计师们多么不愿意,激光雷达已然成了智能汽车时代的外观“潮流配件”,其地位犹如尾翼之于运动车型,从11月广州车展上最受关注的车型来看更是显而易见。

其实在智能汽车传感器里,还有一位能彰显身份的隐秘“大咖”——高精度定位。一台具备高阶智能驾驶功能的车可以没有激光雷达,但一定不能没有高精度定位。
据高精度定位产品和解决方案商导远电子透露,本届广州车展有近40款车型搭载其高精度定位产品及解决方案。其中,包括理想MEGA、昊铂HT、吉利银河E8、零跑C10、极氪007、2024款 飞凡R7、上汽大通MAXUS 大家7等7款近期发布、上市的新车型。
智能汽车为什么离不开高精度定位?
智能车不能没有高精度定位,就如同人不能没有方向感(刚被吐槽过没有方向感的男生没有男性魅力!)。
人的交通出行基本可以拆解为三个问题,我在哪儿,要去哪儿,怎么去?对应到智能车上,就是定位、感知和路径规划,高精度定位顾名思义就是解决“我在哪儿”的问题。
普通的定位会受到云层、楼宇、桥梁、高架等遮挡,导致卫星定位信号漂移。我相信,打滴滴时不小心定位到了对面马路的小伙伴,对GNSS定位漂移的痛苦一定深有体会。
这种低精度的GNSS定位当然是无法满足智能车需求的,于是就有了高精度定位。高精度定位是在GNSS定位信号的基础上,增加了RTK和IMU单元,三者同力协作来解决定位漂移问题,让智能车拥有厘米级的高精度定位。

RTK相对好理解一些,可以理解为它是通过一些手段拿到了“内幕消息”,精确知道当前定位的误差值,然后实时给到GNSS补偿值,让GNSS定位信号还原到被云层等干扰前的真实地理坐标。
也就是说如果是在开阔无遮挡的地面,有了RTK+GNSS的组合就已经能够实现高精度定位了,但真实的道路不会永远都是海阔天空,特别是当高阶智驾开始进入城市道路,楼宇、隧道、桥梁就成了定位信号的拦路虎。
这个时候就该IMU出场表演了,它的工作不受外部环境影响,通过测量本车的加速度和角速度并计算,帮助车辆在GNSS信号丢失的情况下依然能够获取高精度定位。简单理解IMU的原理就如同人体的“前庭系统”,通过感知自身的运动姿态来优化人的“方向感”。
IMU叫做惯性测量单元,听名字就知道是一个以牛顿定律为基础的设备,以导远的IMU模组为例,里面内置了一个三轴陀螺仪和一个三轴加速度计,具备实时输出三个运动方向(X,Y,Z)角速度和加速度的测量能力。
人体也是如此获取方向感的,人体的前庭系统中有半规管,人体在运动的时候,前庭系统半规管内淋巴液会按同样的速度转动,以此让人体获取自身的运动姿态。
IMU的精度要高得多,能通过三轴陀螺仪、三轴加速度计准确获取车辆在3D空间内细微角度变化、加速度变化等数据。
当GNSS和RTK信号被遮挡的时候,IMU可以通过测量加速度和角速度,计算自身的运动速度、姿态等信息,基于信号丢失前的坐标,实时推算出当前的坐标,让车辆即便在隧道、地下车库、立交桥等卫星信号弱或丢失的城市场景里也能拥有高精定位信息,极大扩大了智能车的功能边界。
不过我们在测试过程中也发现,不同车型在进隧道之后,系统降级的距离会不一样,这很大程度上也是IMU的性能差异导致的。
IMU是通过计算来推算定位,传感器的细微误差就会随着时间的推移,如滚雪球般越滚越大,所以性能越好的IMU,能够支撑高精定位的时间就越长,反应在车上就是智驾功能在卫星信号完全受到影响的城市常见环境里能坚持的更久。
轻地图时代,高精度定位决定智能驾驶的体验上限
高精度定位的能力差异会对智驾的体验有非常大的影响,这在轻地图时代会更为明显。
目前各家头部智驾选手都开始奔向轻地图方案,不再使用提供丰富先验信息的高精地图,而且各家也逐步把城市道路作为领航辅助驾驶的主战场。信息少了,任务还变复杂了,系统对定位的精度要求也就更高了。
举个例子,以前系统通过高精地图,提前200米就知道下个路口得左拐,左拐要走最左侧车道,就可以控制车辆提前朝左边车道走。
在轻地图方案下,系统只能通过路牌或者地图卡片里弹出的前方50米左拐知道该去哪儿,这个时候定位信号就要非常精准,在有限的时间内最高效地找到目标车道。
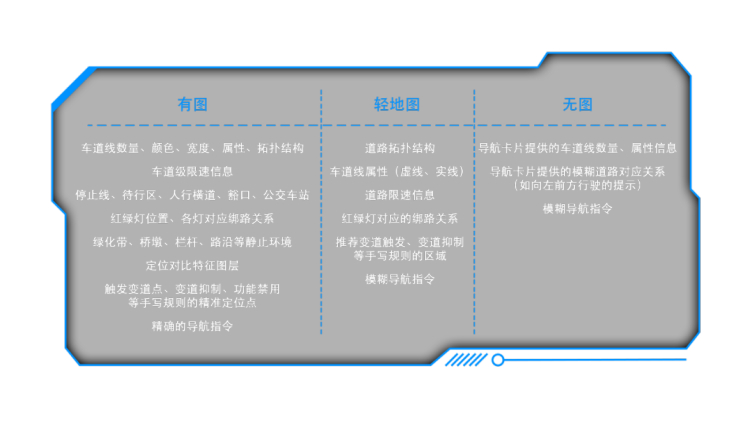
而且高精地图里还存在着十分丰富道路的先验信息,包括车道线、弯道曲率、红绿灯、限速、闸道口等道路信息,为车辆的定位出一份力,现在轻地图方案就只能由高精度定位挑大梁,没有外援,全靠自身的计算能力和误差控制能力。
此外如果想要城市领航辅助驾驶拥有更好的体验,就必须针对不同路况做一些定向的优化,例如在机动车和非机动车容易混合行驶的路段,让车辆尽可能在最左侧车道行驶;再例如在路口一些小区出口、公交站出口的路段,也尽可能保持车辆在左侧车道行驶。
而这一系列能提高智驾体验的策略,都是以高精度定位能够稳定输出厘米级定位能力为基础的,高精度定位的能力上限,一定程度上决定了车辆智能驾驶的体验上限。
所以说高精度定位也是轻地图及全场景领航辅助驾驶时代的核心传感器,智能车能看到什么,是由“高精度定位”决定的,智能车只有在知道自己在哪儿,需要看啥的时候,摄像头看到的信息才能发挥价值。
目前影响高精度定位能力的主要是IMU的工程化能力,GNSS和RTK不容易拉开差距,但IMU内含多个高精度传感器,而车辆给到的运行环境又非常恶劣。
一款车不仅会经历振动、撞击,而且还可能被卖到天南海北,导致温度、海拔、维度、电磁干扰环境等等都差异巨大,想要让高精度传感器满足严苛的车规级标准,就非常考验供应商的工程化能力。
目前高精度定位主流产品形态分为P-Box、IMU模组、和贴片,P-Box是集成了RTK、IMU、计算芯片在内软硬件一体的独立盒子,IMU模组可以理解只集成了IMU的软硬件,有独立保护壳,而贴片则是直接将IMU集成到PCB板上。
三者各有优劣,简单来说P-Box的精度最高,最能满足车规级要求,IMU模组集成更灵活,贴片因为直接集成到PCB板在成本上更具优势。不过此前看导远公布的一项测试,P-Box和IMU模组相对贴片式IMU在定位精度上还是有非常强的优势,贴片IMU受温度影响较大,温度升高会影响定位精度。
相对而言,P-Box的可靠性是贴片IMU所不具备的,智能汽车始终是以安全为第一优先级,因此个人判断,即便是降本增效的当下,P-Box也依然会是高精度定位领域的主流产品方案。
目前高精度定位领域的龙头是导远,参考高工智能统计的2022年高精度定位市场份额来看,导远一家便占据了67.46%的市场份额。参考动力电池领域坐上王座的宁王,2022年国内市场份额是48.2%,可见导远在高精度定位领域,也是妥妥的名牌。

汽车供应链的发展定律一直是,出货量越大,生产know how就积累地越快,产品一致性就越好,质量越可靠,成本也下降地越快,行成良性循环。于是在一些对工艺精度要求非常高的零部件领域,总能发展出一些占据市场份额半壁江山的明星企业。
所以以后当你开启领航辅助驾驶功能行驶在重庆8D魔幻立交上,系统依然稳如老狗,精准汇入每一个路口时,不妨下车后“看一看”你的爱车,用的哪种高精度定位?