01基本原理
步进电机是一种用电脉冲进行控制,将电脉冲(数字信号)转化为角位移的执行机构。
通常步进电机的转子为永磁体,当电流流过定子绕组时,定子绕组产生一矢量磁场。该磁场会带动转子旋转一角度,使得转子的一对磁场方向与定子的磁场方向一致。当定子的矢量磁场旋转一个角度。转子也随着该磁场转一个角度。当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度 (称为"步距角"),它的旋转是以固定的角度一步一步运行的。
步进电机输出的角位移与输入的脉冲数成正比,转速与脉冲频率成正比,改变绕组通电的顺序,电机就会反转。因此:
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;
可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的;
可以通过控制绕组通电顺序,达到控制电机正反转的目的。
步进电机可以作为一种控制用的特种电机,利用其没有积累误差 的特点,广泛应用于各种开环控制。
02步进电机分类
1、按照定子相数进行分类
x相即有x个绕组。
(1)单相步进电机
单相步进电机的电磁转矩只在定子电流变换时产生,其平均转矩比两相以上的电机小得多,响应脉冲频率也在100pps(pulse per second)以下,故其用途受到很大限制,只能在响应脉冲频率比较低的轻载下运行。例如时钟、车用计时器、水表计数器。
(2)两相步进电机
上图所示,定子磁极数为4极,相当于一个绕组占两个极。

上图所示,定子磁极数为8极,相当于一个绕组占四个极。
(3)三相步进电机

三相步进电机定子线圈的主极数为三的倍数,故三相步进电机的定子主极数为3、6、9、12等。
(4)四相步进电机
四相步进电机的驱动器结构复杂,成本高,只有特殊用途才使用。
(5)五相步进电机
2、按照转子结构进行分类
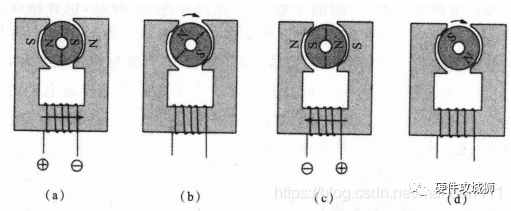
(1)永磁式步进电机(Permanent Magnet,PM)
转子由 永磁材料构成。PM型转子为内转子型,圆柱形转子的外表面分布N、S极(外表面无齿)。
▼单相永磁式步进电机▼
▼两相永磁式步进电机▼
特点:永磁式步进电机输出力矩大,动态性能好,但步距角大。
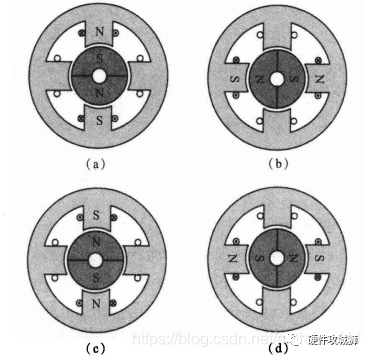
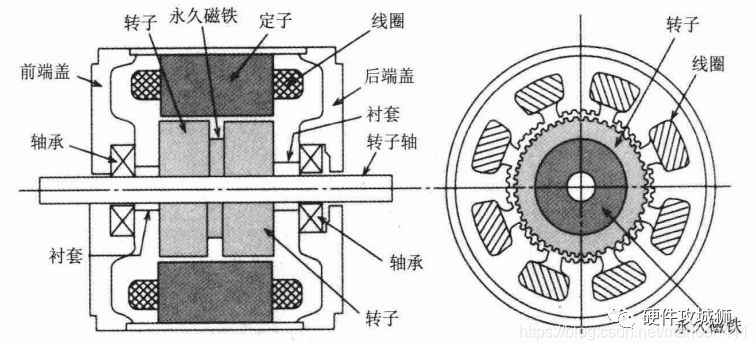
(2)反应式步进电机(Variable Reluctance,VR)
转子由硅钢片或电工纯铁棒等导磁体构成,转子外表面为多齿结构(转子的齿槽在转动时产生磁阻变化,故又称为变磁阻电机)。
当定子线圈通电时,定子磁极磁化,吸引转子齿而产生转矩,使其移动一步。
与永磁电机产生磁性吸引转矩和排斥转矩相比,反应式步进电机只产生吸引转矩。
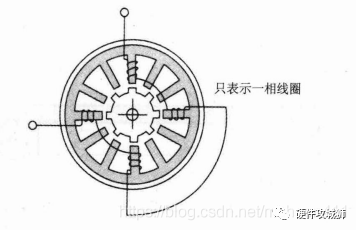
下图为反应式步进电机的结构。图中定子上均匀分布了12个磁极,每个磁极相距30°;相差90°的四个线圈组成一相绕组。转子齿数为8,当一相绕组通电时,其定子极吸引转子齿,使气隙磁阻最小,达到静止位置。
接下来讲解其工作原理:
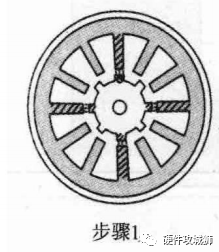
第一步,为第1相线圈的简化图,剖面线表示第1相定子激磁,转子被第1相定子磁极吸引,转子齿转到定子磁极之下。
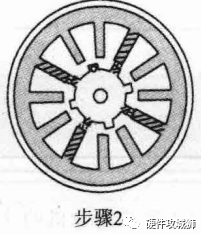
第二步,第1相绕组电流关闭,第2相绕组通电,转子逆时针旋转一步(15°=齿节距除以定子相数),旋转至第2相定子磁极之下停止。
第三步,同样给第3相绕组通电,转子同样逆时针旋转15°,与定子第3相磁极相对位置停止。
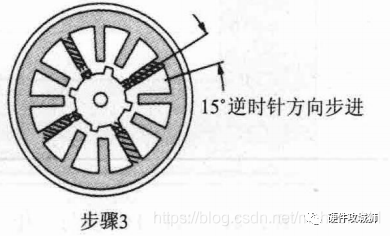
下一刻,第1相绕组又通电,又由步骤3的转子位置逆时针旋转15°到第1相定子磁极下,恢复到第一步状态。
特点:结构简单,生产成本低,步距角小。但因反应式步进电机不使用永久磁铁,其定转子磁场强度与激磁电流成正比,要想增大磁场强度,就需要很大的激磁电流,因此温升很高,散热片也很大,并且动态性能差,效率低,可靠性差。
(3)混合式步进电机(Hybrid Stepping,HS)
混合式步进电机有两相、三相、五相式,本节以两相混合式步进电机进行说明。
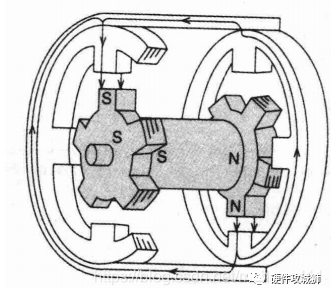
混合式步进电机的名称由其转子结构得来,其转子是PM型转子与VR型转子的复合体。
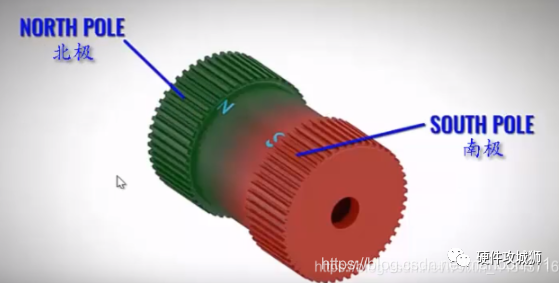
混合式步进电机的转子结构为两个导磁圆盘中间夹着一个永磁圆柱体轴向串在一起,两个导磁圆盘的外圆齿节距相同,与前述的VR型转子结构相同,其两个圆盘的齿错开1/2齿距安装,转子圆柱永磁体轴向充磁,一段为N,另一端为S。
这种电机转子与前面叙述的PM型转子从结构来看,PM型转子的N极与S极分布于转子外表面,要提高分辨率,就要提高极对数,通常20mm直径的转子可配置24极,如再增加极数,会增大漏磁,降低电磁转矩;而混合式步进电机的转子N极与S极分布在两个不同的软磁圆盘上,因此可以增加转子极数,从而提高分辨率,20mm的直径的转子可配置100极,并且磁极磁化方向为轴向,N极与S极在装配后两极磁化,充磁简单。
与转子齿对应的定子极,主极内径有与转子齿节距相同的小齿,与转子齿的磁通在气隙内相互作用,能产生电磁转矩。
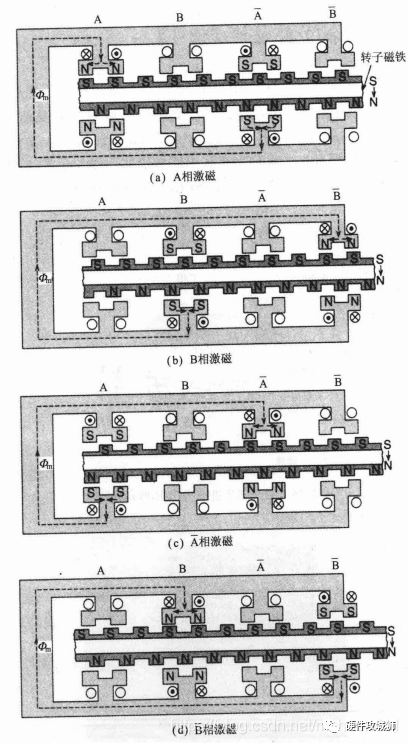
下图为两相混合式步进电机的磁路:
下图为两相混合式步进电机的工作原理图:
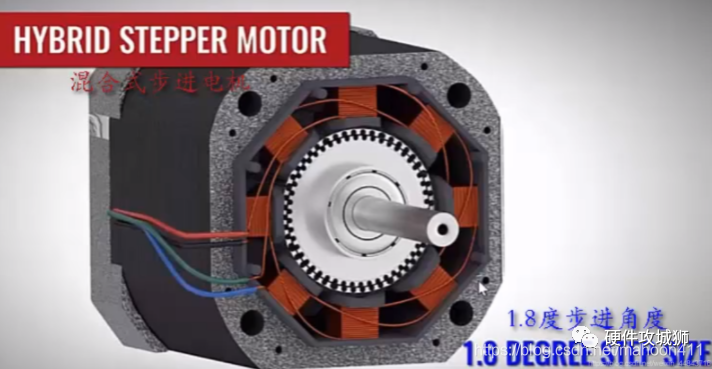
接下来,以一个实物模型来详细讲解混合式步进电机的工作原理。
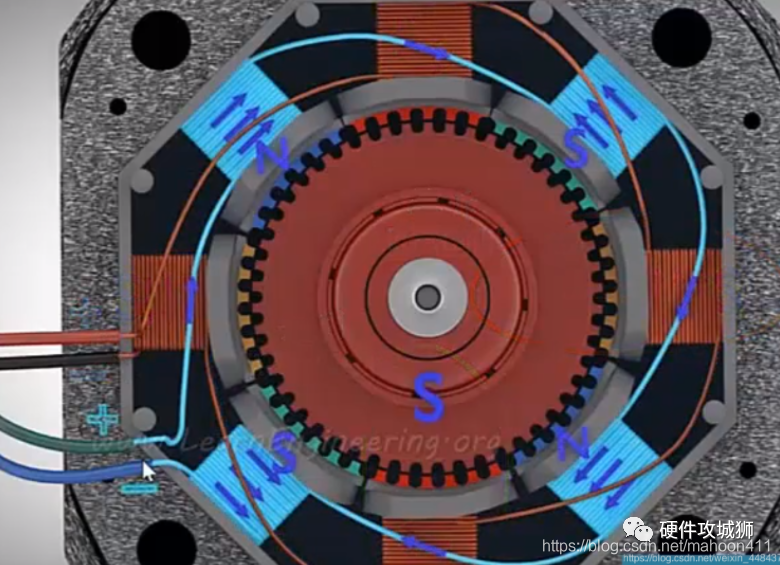
下图是一个双极性四线两相混合式的步进电机:
注:在这里可以先不用管什么是双极性,接着往下看就行。
注:“四线” 就是说明步进电机有四个接线口。
下图为上述步进电机的转子结构:
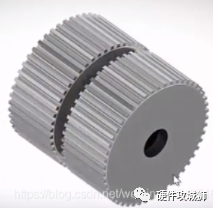
转子内部如下图所示,由图可知,里面由永磁铁,齿轮帽构成。
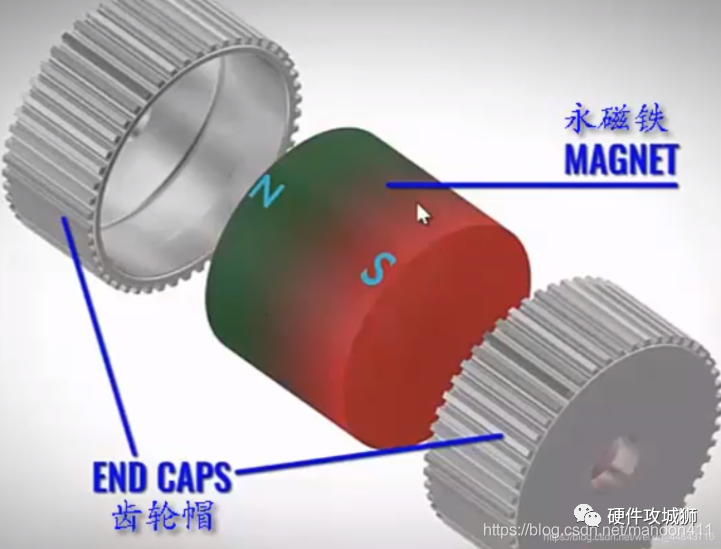
齿轮帽本身不带磁性,但是和永磁铁挨一起了,就有了磁性。
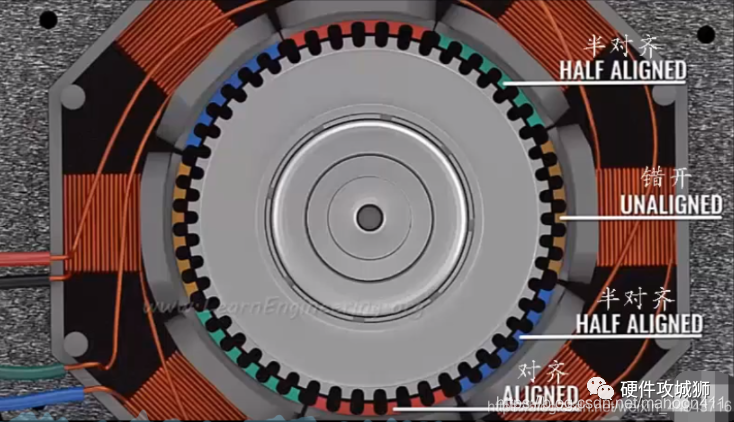
看完了转子,我们来分析定子。转子有50个齿,定子只有48个齿。
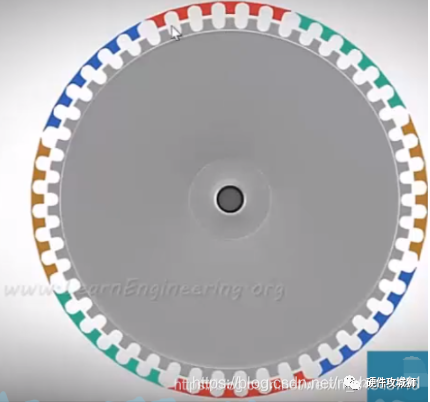
从下图可以看到它其实只有两个独立通电的线圈,也就是说这个步进电机是两相步进电机。
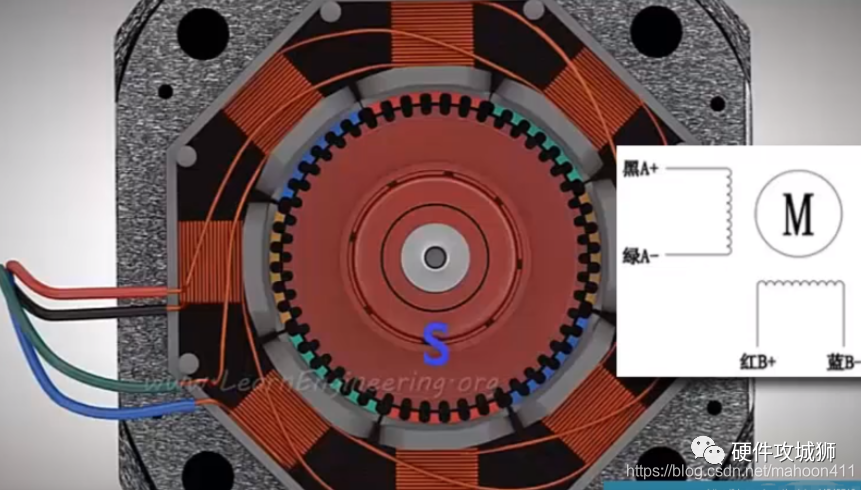
我们将两个线圈进行标识为A和B,如下图:
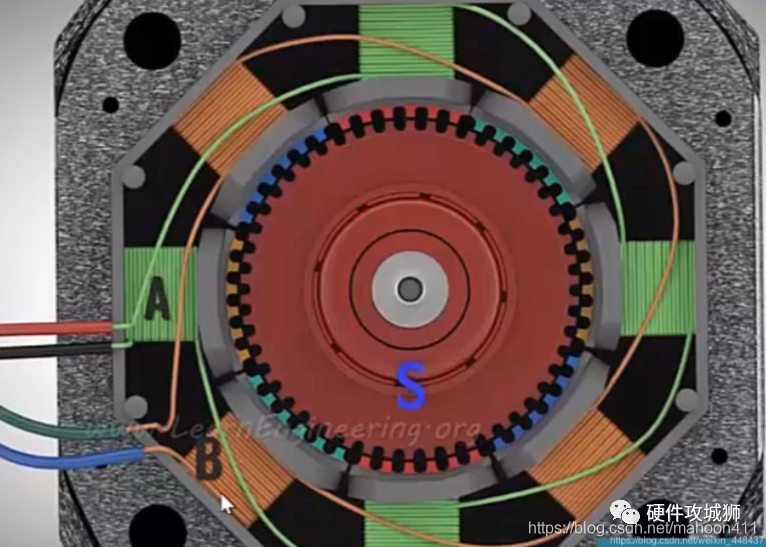
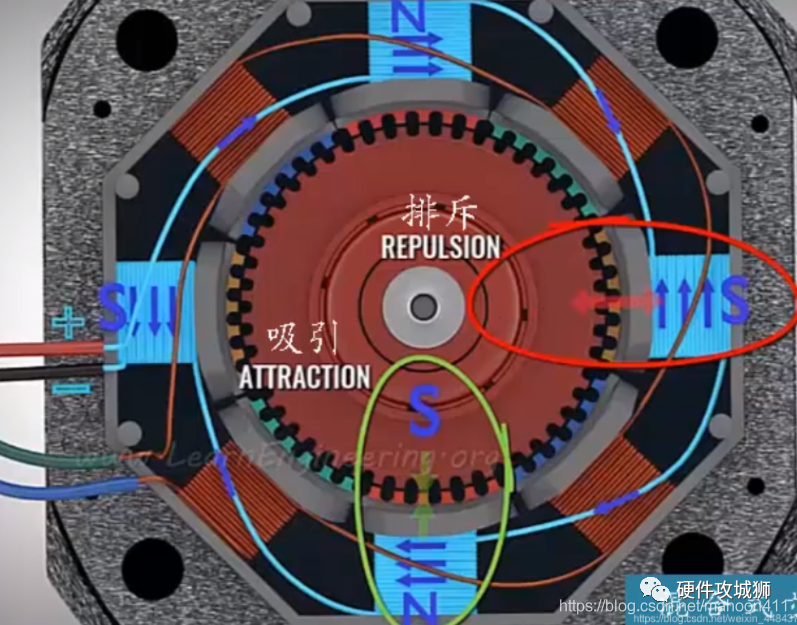
这是给线圈A通电,如下图:转子齿是S极,线圈会产生磁场,由于异性相吸,所以红色的定子齿会和转子齿相吸引,由于同性互斥,所以黄色的齿会排斥转子齿。
当给线圈A断电,线圈B通电后,如下图:
磁场发生了变化,定子会发生微小的转动,会转动1.8度,如下图:转子齿是S极,线圈会产生磁场,由于异性相吸,所以蓝色的定子齿会和转子齿相吸引,由于同性互斥,所以绿色的齿会排斥转子齿。
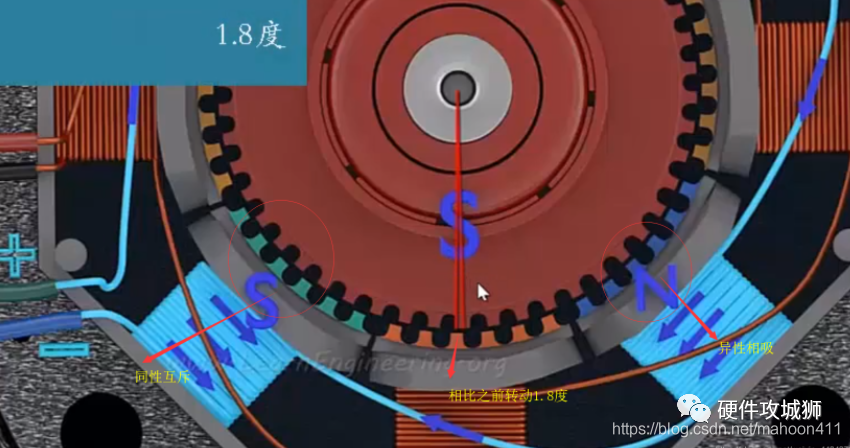
值得注意的是,这是半步进的驱动方式,走一步是1.8度,如果是两个线圈同时都通电的话,就是全步进驱动方式了,走一步是0.9度。这样控制更加精确。
特点:步距角小、输出力矩大、动态性能好。但结构复杂,成本较高。
3、按照驱动方式(双极驱动/单极驱动)分类
电机按照驱动方式也分单极性步进电机和双极性步进电机。
简单来说,如果步进电机的线圈是可以双向导电的,那么这个步进电机就是双极性的,相反,如果步进电机的线圈是只允许单向导电的,那么这个步进电机就是单极性的。
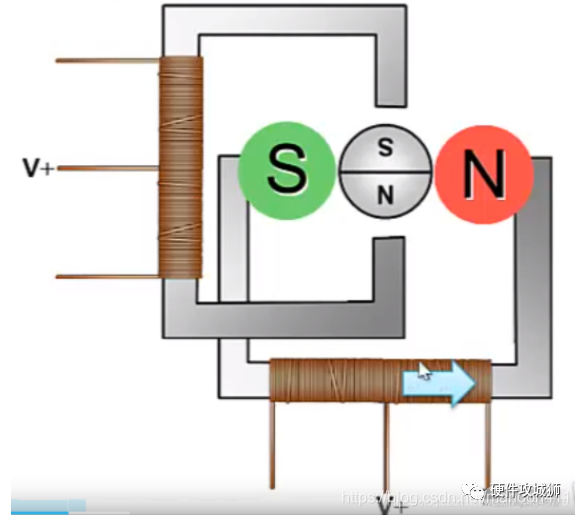
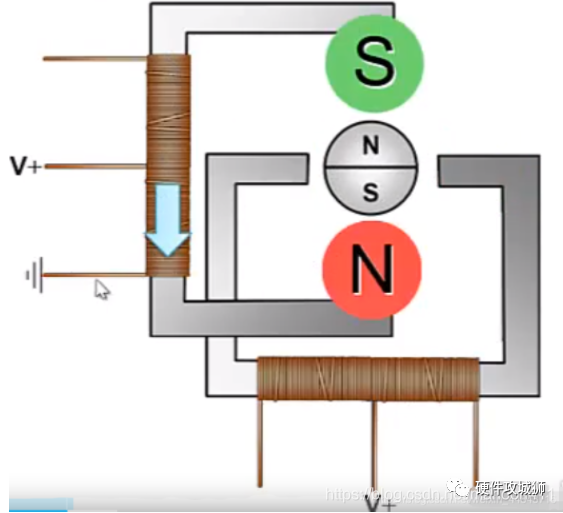
下图中的线圈是可以双向导电的,所以是双极性步进电机。
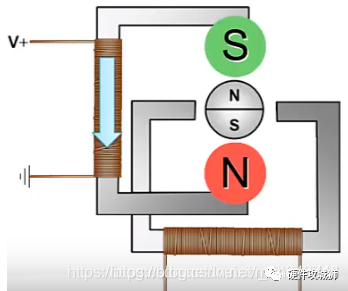
下图的线圈中间导线总是接电源正极(也有总是接电源负极的),通过改变电源接地的位置来改变电磁场,从而改变转子转动角度。
通电后受到电磁场得作用,转子移动。
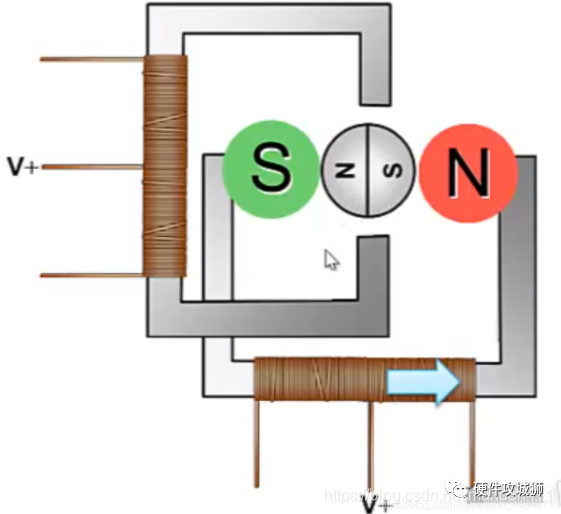
此时这个线圈断电,另一个线圈通电后,转子又会发生改变。
下图为单极和双极的两相驱动电路及其电压波形,两相式通常用两相激磁方式(通常两个相同时加激磁电压)。
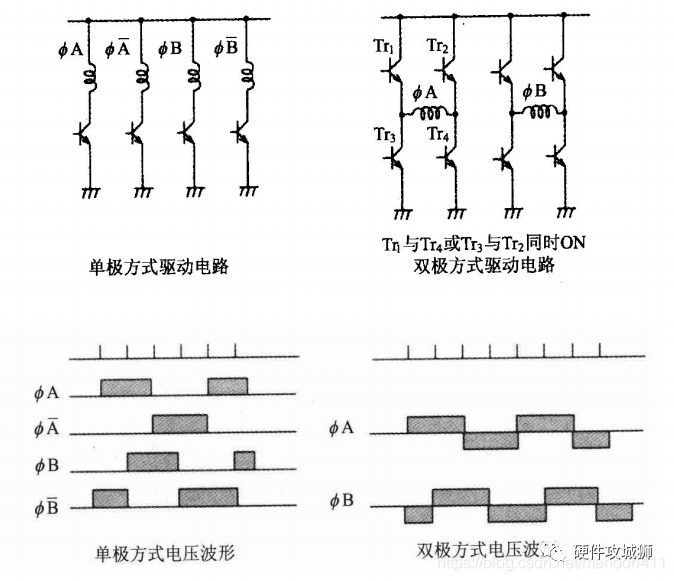
比较单极式与双极式的驱动电路,单极式驱动电路用4个功率管,线圈电流在线圈内单一方向流动。双极式驱动电路使用功率管的个数为单极式的两倍,需要8个,线圈电流在线圈内正反向交替流过,Tr1与Tr4或Tr3与Tr2同时且交替导通,Tr1与Tr3即使短时同时导通,也会造成电源短路,产生很大的电流,因此有必要附加防止短路电路。双极式驱动电路比单极式驱动电路复杂很多。
下图为单极式步进电机及其线圈不使用中间抽头,两个线圈串联做双极式驱动的单极式与双极式的特性曲线。且均采用同一恒电流驱动方式。

由此可看出,一般低速大转矩的负载使用双极式驱动,而高速驱动的负载使用单极式驱动。
低速时双极式的输出转矩比单极式约大50%。高速时,因双极式匝数多的原因,电感变大,使电流减小,从而转矩减小。
故针对负载的大小、使用速度、加速时间等,有必要合理选择单极式或双极式的驱动应用场合。
03基本参数
1、相数
指定子相数,即可独立通电的定子电磁圈数,x相即有x个绕组。
2、分辨率
步进电机分辨率即步进电机转子转一圈(360°)所走的步数,若已知步进电机步距角,可使用360°除以步距角来计算步进电机分辨率。步进电机分辨率越高,位置精度越高。
3、步距角(步进角)
为了得到高分辨率,就需要减小步距角。步距角的公式如下所示:

其中,θs为步进电机步距角;P为定子相数;Nr为转子极对数(即转子极数除以2)。
注:在反应式步进电机中,步距角不能用上式计算,而是上式的两倍。即分辨率与永磁式及混合式相比,虽然转子齿数相同,但反应式只有一半。
注:在混合式步进电机中,Nr为转子齿数。
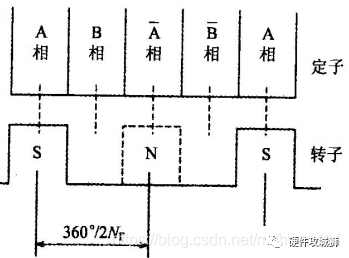
上述公式的物理意义为:转子旋转一周的机械角度为360°,如用极数2Nr去除,相当于一个极所占的机械角度为180°/Nr。也就是说,一个极的机械角度用定子相数去分割,就得到了步距角,如下图的HS型步进电机所示。
又由上式可知,要提高步进电机的分辨率,就要增加转子极对数Nr或增加定子相数P。而增加Nr收到机械加工的限制,所以要制造高分辨率的步进电机需要两种方法并用。
4、定位转矩(DETENT TORQUE)
是指步进电机没有通电的情况下,定子锁住转子的力矩。DETENT TORQUE在国内没有统一的翻译方式,暂且翻译为定位转矩。
由于反应式步进电机的转子不是永磁材料,所以反应式步进电机没有定位转矩。
5、保持转矩(最大静力矩)
指步进电机通电但没有转动时,定子锁住转子的力矩。
它是步进电机最重要的参数之一,通常步进电机在低速时的力矩接近保持转矩。由于步进电机的输出力矩随速度的增大而不断衰减,输出功率也随速度的增大而变化,所以保持转矩就成为了衡量步进电机最重要的参数之一。比如,当人们说2Nm的步进电机,在没有特殊说明的情况下是指保持转矩为2Nm的步进电机。
一般,最大静转矩较大的电机,可以带动较大的负载转矩,负载转矩和最大静转矩的比值通常取为0.3~0.5,即TL=(0.3~0.5)Tjmax。
按最大静转矩的值可以把步进电机分为伺服步进电机和功率步进电机,前者输出力矩较小,有时需要经过液压力矩放大器或伺服功率放大系统放大后再去带动负载,而功率步进电机的最大静转矩一般大于0.05Nm,它不需要力矩放大装置就能直接带动负载运动,这不仅大大简化了系统,而且提高了传动精度。
6、绕线类型
也可理解为驱动方式,有双极性和单极性。
7、额定电流
指电机可以长期连续工作的电流。
8、额定电压
指电机可以长期连续工作的电压。
9、基座尺寸
包括NEMA10、NEMA11、NEMA14、NEMA16、NEMA17。
10、矩频特性
电动机的性能在很大程度上不仅仅取决于矩角特性的形状,而且取决于矩频特性,首先需要根据计算出的脉冲速度和运行需要的转矩,作出速度一转矩曲线,将该曲线与步进电机生产厂家的矩频特性曲线比较,若计算曲线在产品特性之下,则可选择相应的电机和驱动器,步进电机的动态转矩与驱动器的形式有很大的关系,因而选用时必须了解给出的性能指标是在何种型式的电源及驱动下测定的。
11、速度力矩曲线
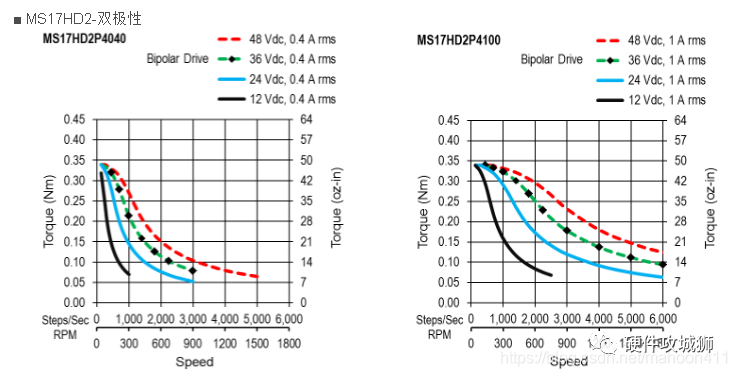
如上图所示。为什么步进电机的力矩会随转速的升高而下降?
当步进电机转动时,电机各相绕组的电感将形成一个反向电动势;频率越高,反电动势越大,在它的作用下,电机相电流随频率(或速度)的增大而减小,从而导致力矩下降。
12、空载启动频率
空载启动频率,即步进电机在空载情况下能够正常启动的脉冲频率。如果脉冲频率高于该值,电机不能正常启动,可能发生丢步或堵转。
在有负载的情况下,启动频率应更低。如果要使电机达到高速转动,脉冲频率应该有加速过程,即启动频率较低,然后按一定加速度升到所希望的高频(电机转速从低速升到高速)。
04应用场景
打印机、传真机、监视摄像机、照明装置、机器人、医疗器械等。