






 技术咨询
技术咨询 代买器件
代买器件 商务客服
商务客服 研发客服
研发客服驱动器在开始开环盲换向之前需要与转子位置同步,以避免将电压施加到错误的相位(为错误的相位通电)。有两种方法可以获得此位置 - 将电机驱动到已知位置(称为对齐和前进),如图 1 所示;或确定转子的位置(称为初始位置检测 [IPD]),如图 2 所示。
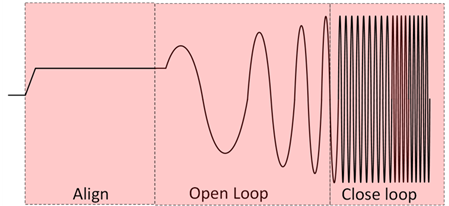
图 1:对齐时电机启动期间的相电流
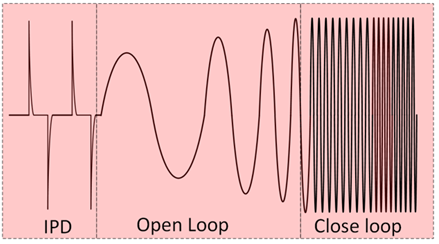
图 2:使用 IPD 启动电机时的相电流
选择一种方法而不是另一种方法的基础主要取决于电机的类型和您的系统要求。对齐和运行是用于启动电机的常用方法,其中在第相上施加恒定电压将电机驱动到已知位置。第二相接地,而第三相可以接地或保持高阻抗。在此状态下要考虑的重要事项是电机应完全或几乎静止,以便驾驶员可以开始电机旋转而不会不同步。如果电机不是静止的,那么驱动器可能会失去转子同步并熄火。
您还必须考虑在对齐状态下是否提供了足够的电流,使转子从其静止位置移动。电流过高会导致对齐状态下出现较大的过冲;电流过低将无法位移转子。
您需要在对齐状态下配置两个重要参数:对齐时间和当前幅度。您可以通过配置电可擦除可编程只读存储器 (EEPROM) 寄存器设置,在集成驱动器中优化这些参数。
IPD是一种算法,它通过在每相上施加电流脉冲并测量脉冲达到用户设置阈值的时间间隔来检测电机的位置。电机的类型会影响您对电流脉冲的持续时间和幅度的调整;换句话说,对于电感较低、电流幅度较高的电机,较低频率的电流脉冲更可取,反之亦然。使用IPD的主要优点是可以减少启动电机所需的时间,并避免在对齐状态下引起的后旋和振动。这些优势有助于用户从基于传感器的换向过渡到无传感器,同时与使用霍尔传感器相比还可以节省成本。
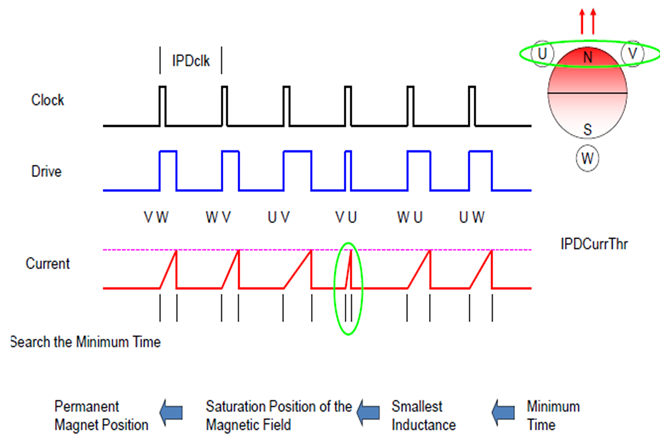
如图3所示,IPD相位施加电流脉冲并测量电流达到阈值所需的时间。持续时间较短的脉冲表示电感较低,由此可以估计转子位置。
启动可靠性对于 BLDC 系统非常重要,IPD、对齐和软开环加速等功能有助于实现这种可靠性。在集成驱动器中,驱动器本身负责电机换向;如本文所述,启动期间的任何额外灵活性都使驱动程序智能可靠。
在这篇博客中,我讨论了用于无传感器驱动器的许多不同技术,以从静止位置启动电机,以及这些技术的关键注意事项。DRV10987 等无传感器 BLDC 电机驱动器支持这两种技术,可通过配置 EEPROM 来使用。
相关文章









