市场上的步进电机主要分为三种类型:PM(永磁)型、VR(可变磁阻)型和混合型。有什么区别,您应该使用哪一个,它们是如何工作的?
让我们快速回顾一下步进电机的作用。步进电机以特定的“步数”增量旋转,无需编码器反馈或复杂的 PID 回路。旋转量和速度可通过脉冲数和频率轻松控制,步进电机可提供±3 弧分 (±0.05°)的高度可重复停止精度。当步进电机通电但处于静止状态时,在没有电磁制动器的情况下会产生保持转矩。它们非常适合电机需要准确停止并提供保持扭矩的成本敏感型应用。
步进电机的设计会影响其特性。在接下来的几分钟内,我将介绍市场上的三种步进电机,以及为什么偏爱其中一种。
PM“永磁”型
这是一种步进电机,其转子由两个彼此略微偏移的永磁体转子制成。永磁体轴向充磁;这意味着北极和南极交替出现并且与电机轴位于同一轴线上。 当电流施加到绕组时,定子上的磁极被磁化并与永磁转子的相反磁极对齐。例如,北极将与南极直接对齐。
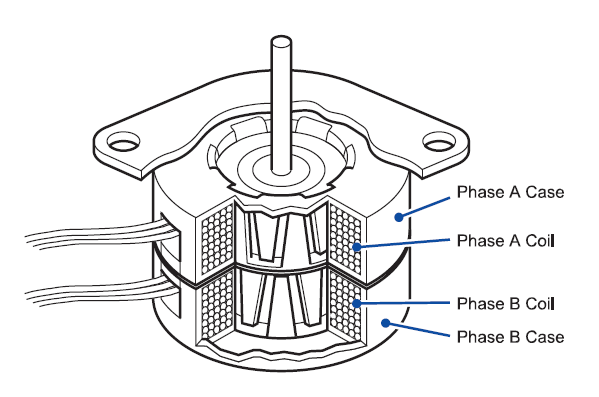
广泛使用的 PM 型步进电机是 2 相爪形电机,如下所示。
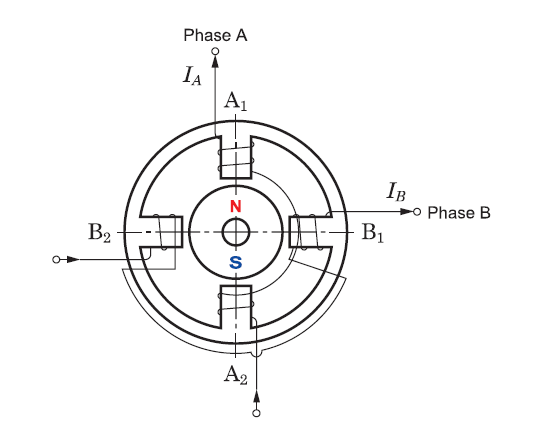
下图显示了一个转子和一个定子,其中施加了电流,因此 A1 极被磁化为南极,A2 极被磁化为北极,因此吸引了转子永磁体的相反磁极。如果电流从A相切换到B相,使B1磁化为南极,B2磁化为北极,转子将顺时针旋转90°。
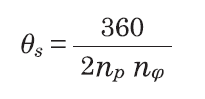
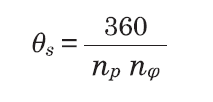
步距角使用转子的极数 (Np) 和相数 (Nphase) 表示如下。如果极数或相数增加,则步距角将减小。但是,随着极数的增加,磁力和转矩也变弱。
PM 型步进电机结构简单,制造成本低。永磁体允许 PM 型步进电机输出更高的扭矩。然而,由于旋转过程中损耗大,高速性能受到限制。PM 型步进电机通常用于简单定位,因为它的分辨率往往大于其他类型(即:3.6° 或更大)。对于更高分辨率,建议使用半步或微步。 通过微步进,驱动器精确控制每相电流的能力在确定电机的重复位置精度方面变得越来越重要。另一个区别是 PM 型步进电机使用恒压驱动器,它比恒流斩波驱动器更难使用。
VR“可变磁阻”型
这是一种步进电机,在磁力集中的转子和定子上提供齿。它提供了此处讨论的三种类型中最简单的设计。下图显示了一个 8 极 12 槽的 3 相 VR 型步进电机。大多数磁芯都使用铁等铁磁材料,因为它在地球上储量丰富,并且能够轻松通过磁通量。VR型步进电机没有磁铁,这意味着它不能输出静止时的保持扭矩或制动扭矩。
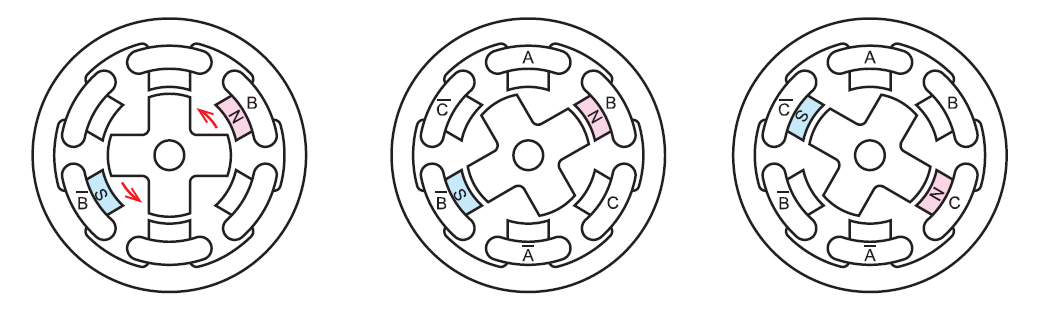
下图显示了 4 极 6 槽 VR 型步进电机的示例。转子上的“齿”被吸引到定子上的磁极。转子每一侧的定子磁极通过反向缠绕磁极来磁化南北。
在下图中,我们在左侧显示了“B 相激发”状态。在这种情况下,离转子最近的齿将与定子上最近的磁极对齐。转子将逆时针旋转 30°,直到齿彼此对齐(参见“B 相的停止位置”)。现在,当 C 相以同样的方式被激励时,转子将旋转 60°,直到齿与 C 相对齐。
B相激发B相停止位置C相停止位置
VR型步进电机的一个优点是不需要改变定子磁极的极性,因此可以简化其驱动电路。它的缺点是不能进行精细的转矩控制,因为转矩与电流的平方成正比,而不是与电流成正比。但是,由于它不使用永磁体,因此其高速性能优于 PM 型步进电机。
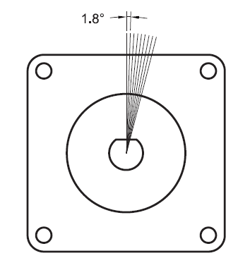
VR型步进电机的步进角用下式表示。Np是转子的齿数,Nphase是相数。为了更精细的分辨率,增加转子的齿数是有效的。然而,如果定子槽的数量也增加,则该结构制造起来非常复杂。下图显示了 50 齿转子和定子设计。这是一个 4 相步进电机,线圈分为 4 组。输入 Np = 50 和 Nphase = 4 将导致步距角为 1.8°。
VR 型步进电机已经存在很长时间了。这些电机在电机速度较高时扭矩下降较小,因此在中高速应用中,它们通常是比 PM 型步进电机更好的选择。然而,众所周知它们会产生更多噪音,因此它们的应用范围受到限制。VR 型步进电机在市场上不如 PM 型步进电机常见。
混合式步进电机
“混合”型步进电机结合了永磁型和可变磁阻型步进电机的设计和优点。因此,混合型步进电机在其设计中同时使用永磁体转子以及带齿的转子和定子。凭借强大的永磁体、带齿转子、带齿定子和微小气隙,混合式步进电机能够比其他两种类型更好地集中磁通量。通过堆叠磁钢叠片可以实现低损耗,磁通量很容易通过。
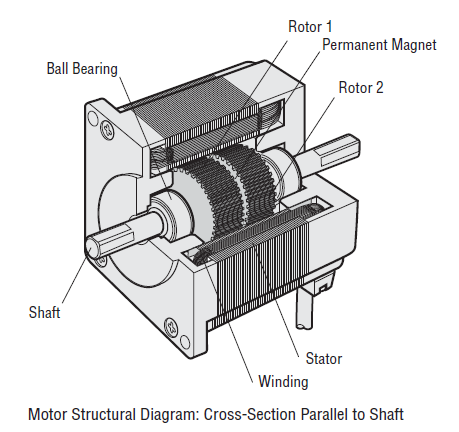
混合型步进电机的构造从两个转子杯(转子 1 和转子 2)和一个轴向磁化的强稀土永磁体开始。两个滚珠轴承将转子安装到电机外壳中。转子上有 50 个齿(每步 1.8°)或 100 个齿(每步 0.9°)。一个转子磁化为北极,一个转子磁化为南极。转子杯上的每个齿都成为磁极。
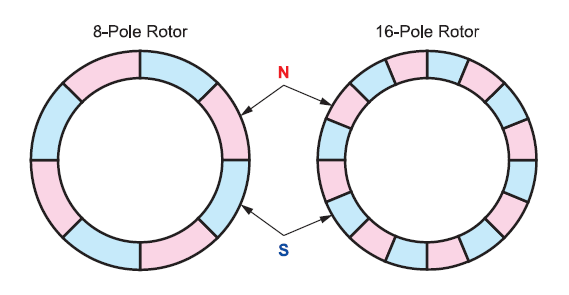
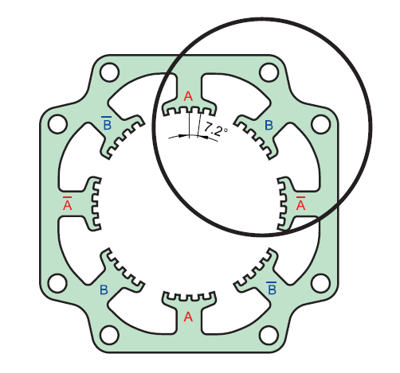
在下面的两张图片中,我们展示了两个转子的俯视图;从顶部的北极转子开始。两个转子杯颜色不同。红色是北极转子,蓝色是南极转子。
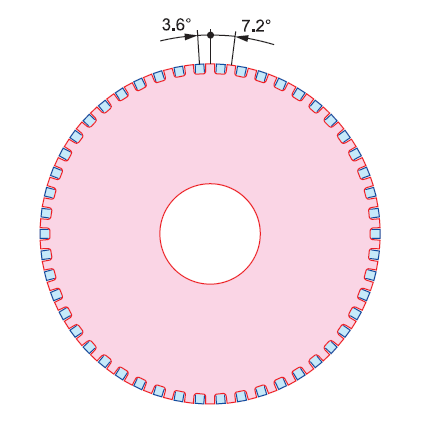
由于有 50 个齿,因此全齿距为 7.2°。两个转子杯偏移半个螺距 (3.6°),因此转子 1 的南极齿在转子 2 的北极齿之间排成一行。从转子的横截面视图中,您可以清楚地 看到由于两个转子杯的偏移,北极和南极齿交替出现。 当驱动器给绕组通电或励磁时,定子磁极变成电磁铁,永磁体转子通过拉力和推力跟随它们,并以固定的增量停止。定子的北极将吸引转子的南极,反之亦然。
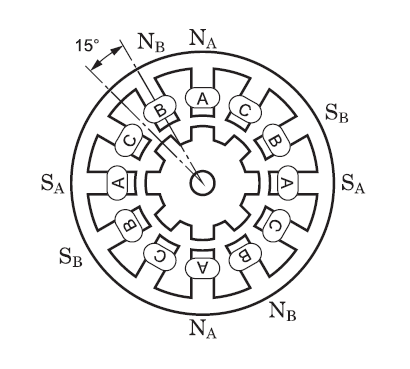
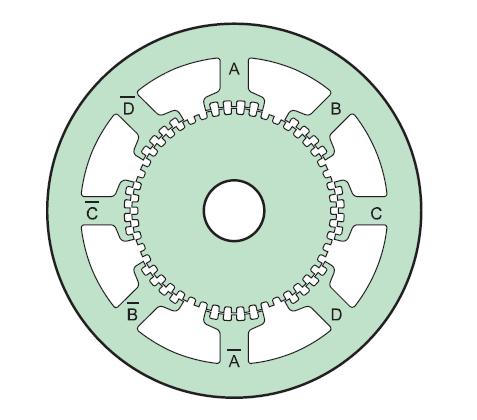
定子中有八个定子极。当绕组缠绕到主磁极并施加电流时,每个磁极都被磁化为北极或南极。电流的方向可以决定磁极。激发时,相对侧的两个极具有相同的极性,与这些极成 90° 的两个极具有相反的极性。一起激发的主要磁极称为“相”,可分为两相(A相和B相)。这就是它被称为“两相”步进电机的原因。
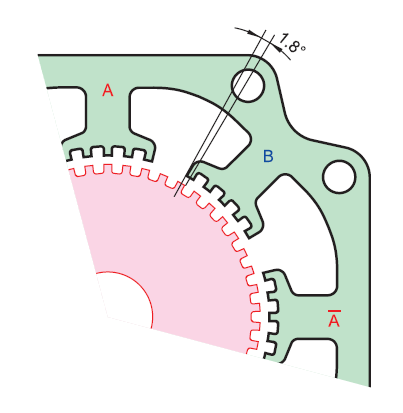
混合式步进电机的步距角与转子上小齿数ZR和相数n成反比。分母2表示定子的主磁极可以配置成北极和南极两种状态。这是 VR 型和混合型步进电机之间的根本设计差异。
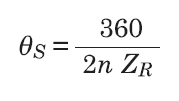
牙齿排列偏移A相兴奋B相激发
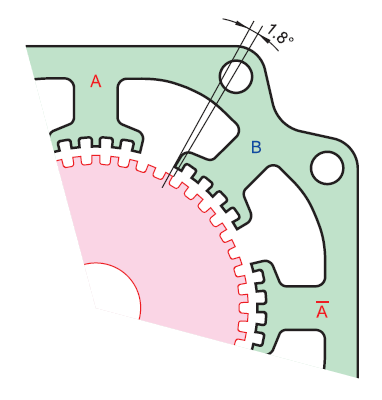
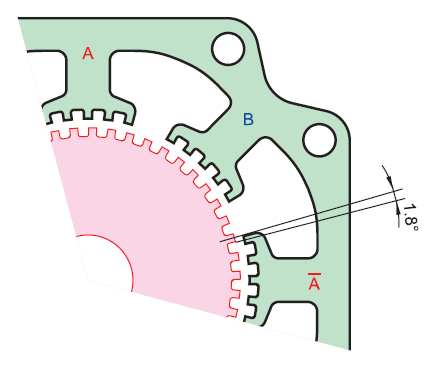
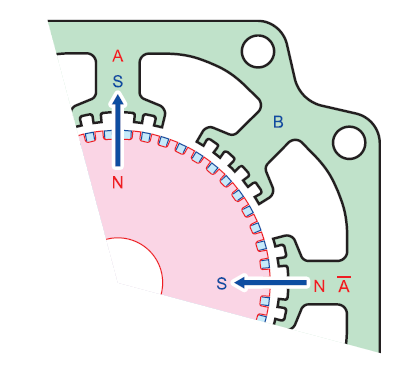
混合型步进电机每步旋转1.8°的原因是由于转子和定子之间的几何设计,电机每步仅移动四分之一齿距。当A相励磁为南极,其定子齿与转子的北极齿直接对齐时,B相的定子齿实际上与转子齿偏移1.8°。这称为齿排列偏移,是两相混合式步进电机每步旋转 1.8° 的原因。
对于每步0.9°的步进电机,两个转子齿都需要增加到100。任何超过100齿的东西都很难制造。
对于混合式步进电机,稀土永磁体可以获得高扭矩,同时保持小齿获得的高分辨率。另外,电流和扭矩之间的关系接近正比;使其比 VR 型步进电机更易于控制。混合型步进电机还可以获得更高的分辨率(即:每整步 0.72°/每转 500 步)。通过微步进可以实现更高的分辨率。
概括
PM(Permanent Magnet)型:使用永磁体,中等扭矩,中低速
VR(可变磁阻)类型:齿形转子/定子,低扭矩,中高速
混合型:结合永磁体和齿,扭矩和速度的良好结合
市场上最受欢迎的步进电机是混合型,因为它提供最佳性能,但成本较高。 混合式步进电机适用于大多数应用,而永磁或可变磁阻步进电机仅限于某些应用。近年来,由于步进电机在功能、分布式控制和易于编程方面的技术改进,它们变得越来越智能。可以为步进电机添加减速机和闭环反馈以扩大其应用范围。与可以提供所有必要组件和培训的制造商合作可以让生活更轻松。









