显示是任何嵌入式系统应用程序中非常重要的一部分,因为它可以帮助用户了解系统的状态,并显示系统生成的输出或任何警告消息。电子产品中使用的显示器类型很多,如7段显示器,LCD显示器,TFT触摸屏显示器,LED显示器等。
今天在本教程中,我们将用ARM7-LPC2148连接7段显示器。在详细介绍之前,我们将了解如何控制7段模块以显示任意数量的字符。
7段显示器
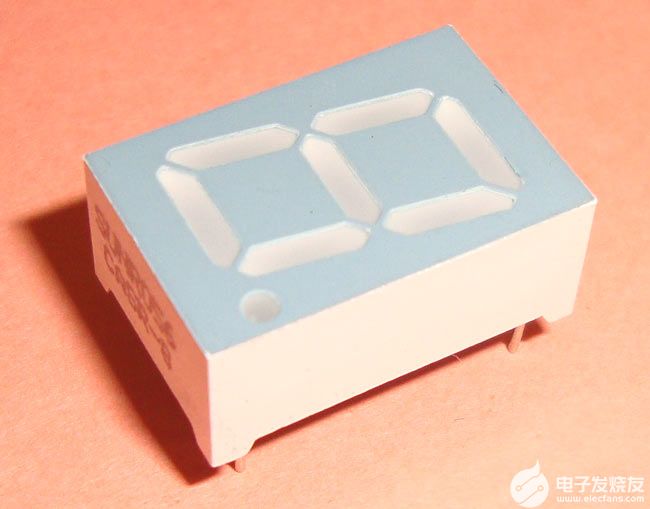
7段显示是显示数字和字符的最简单的显示单元之一。它通常用于显示数字,并且比点阵显示具有更亮的照明和更简单的结构。由于照明更亮,因此可以从比LCD更大的距离观看输出。如上图所示的7段显示器,它由8个LED组成,每个LED用于照亮单元的一个段,第8个LED用于照亮7段显示器中的DOT。当使用两个或多个 7 段模块时,例如用于显示 (0.1),则使用 8thLED。单个模块用于显示单个数字或字符。要显示多个数字或字符,请使用多个 7 段。
7段显示器的引脚
有10个引脚,其中8个引脚用于表示a,b,c,d,e,f,g和h / dp,中间两个引脚是所有LED的公共阳极/阴极。这些公共阳极/阴极在内部短路,因此我们只需要连接一个COM引脚
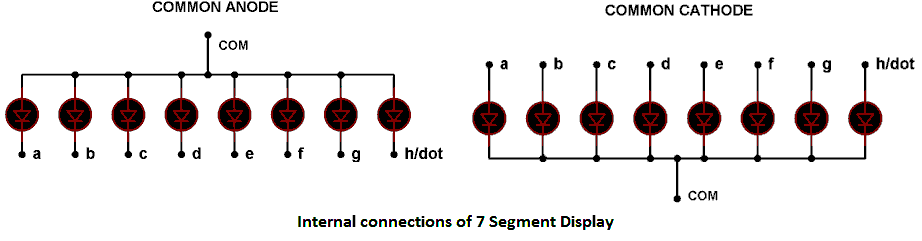
根据连接,我们将 7 段分为两种类型:
共阴极
其中,所有8个LED的所有负端子(阴极)都连接在一起(见下图),命名为COM。所有正极均单独放置或连接到微控制器引脚。如果我们使用微控制器,我们将逻辑设置为高电平以照亮特定内容,并将低电平设置为关闭LED。
普通阳极
其中,所有8个LED的所有正极(阳极)都连接在一起,称为COM。所有负热量都单独放置或连接到微控制器引脚。如果我们使用微控制器,我们将逻辑设置为低电平以照亮特定,并将逻辑设置为高以关闭LED。
因此,根据引脚值,可以打开或关闭特定的段或7段的行以显示所需的数字或字母。例如,要显示 0 位数字,我们必须将引脚ABCDEF 设置为高电平,仅将 G 设置为低电平。由于ABCDEF 指示灯亮起,G 指示灯熄灭,因此在 7 段模块中形成 0 位数字。(这是针对共阴极的,对于公共阳极,它是相反的)。
下表显示了根据LPC2148引脚的HEX值和相应数字,用于共阴极配置。
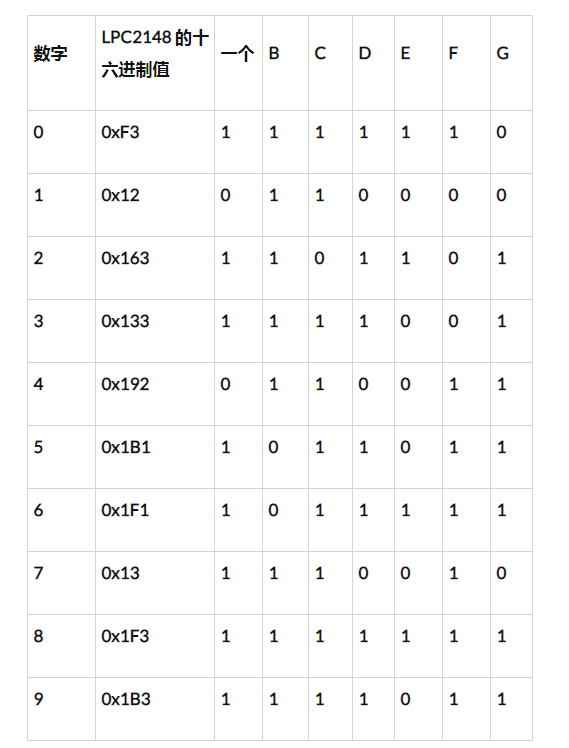
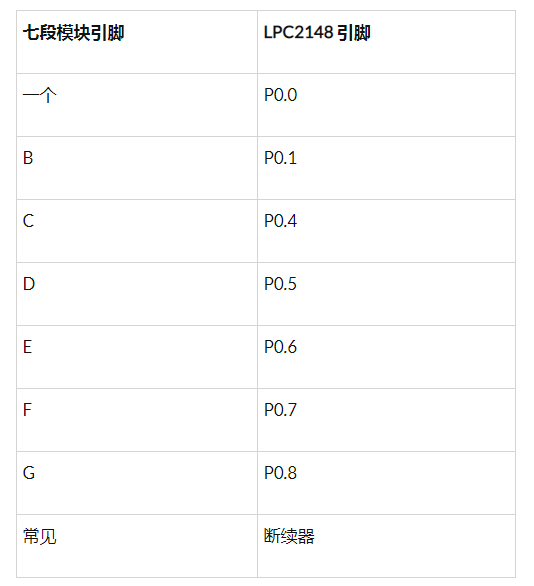
重要提示:在上表中,我根据LPC2148中使用的引脚给出了十六进制值,请查看下面的电路图。您可以使用所需的任何引脚,但会根据该引脚更改十六进制值。
所需材料
硬件
断续器2148
七段显示模块(个位数)
试验板
连接线
软件
凯尔乌维森5
闪光魔术
电路图
为了将7段与LPC2148连接,无需外部元件,如下图所示:
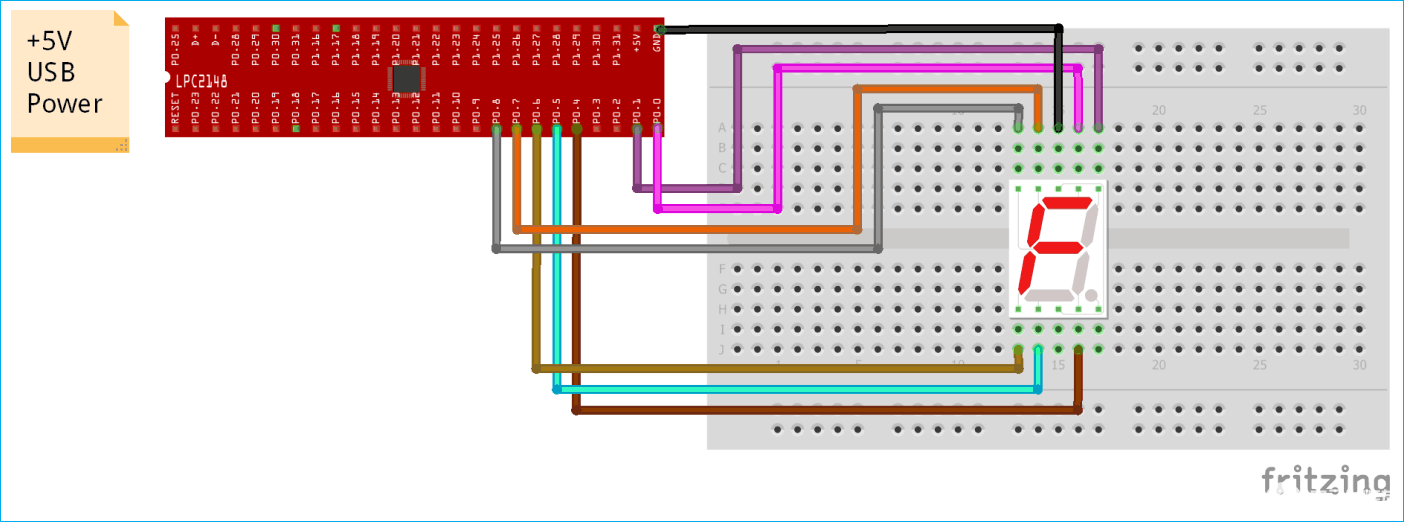
下表显示了7段模块和LPC2148之间的电路连接
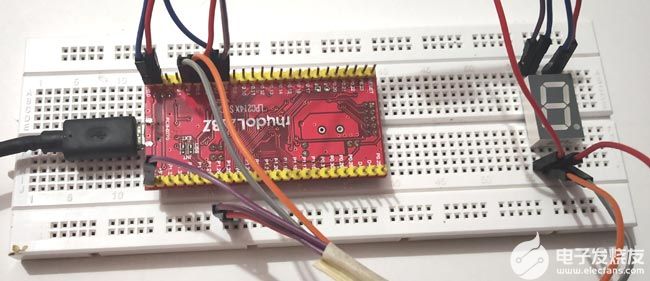
对 ARM7 LPC2148 进行编程
在上一教程中,我们已经学会了如何使用 Keil 对 ARM7-LPC2148 进行编程。我们在这里使用相同的Keil uVision 5来编写代码并创建十六进制文件,然后使用闪存魔术工具将十六进制文件上传到LPC2148。我们使用USB电缆供电并将代码上传到LPC2148
本教程末尾给出了带有视频说明的完整代码。在这里,我们解释代码的几个重要部分。
首先,我们需要包含LPC214x系列微控制器的头文件
#include
接下来将引脚设置为输出
IO0DIR=IO0DIR|0xffffffff
这会将引脚 P0.0 设置为 P0.31 作为输出,但我们将仅使用引脚(P0.0、P0.1、P0.4、P0.5、P0.6、P0.7 和 P0.8)。
然后根据要显示的数字将某些引脚设置为逻辑高电平或低电平。在这里,我们将显示从(0到9)的值。我们将使用一个数组,该数组由值 0 到 9 的 HEX 值组成。
unsigned int a[]={0xf3,0x12,0x163,0x133,0x192,0x1b1,0x1f1,0x13,0x1f3,0x1b3};
值将在代码放入 while 循环时连续显示
while(1)
{
for(i=0;i<=9;i++)
{
IO0SET=IO0SET|a[i]; //sets corresponding pins HIGH
delay(9000); //Calls delay function
IO0CLR=IO0CLR|a[i]; //Sets corresponding pins LOW
}
}
在这里,IOSET和IOCRR分别用于设置引脚高电平和低电平。由于我们使用了端口0引脚,因此我们有IO0SET和IO0CLR。
For loop用于在每次迭代中增加i,每次当i增加时,7段也会增加其上显示的数字。
延迟函数用于在 SET 和 CLR 之间生成延迟时间
void delay(int k) //Function for making delay
{
int i,j;
for(i=0;i
for(j=0;j<=1000;j++);
}
完整代码
//INTERFACING SINGLE SEVEN SEGMENT MODULE WITH LPC2148
//CIRCUIT DIGEST
//By Pramoth.T
#include //Header file for LPC214x Series microcontrollers
void delay(int ); //Function declaration for delay
int i; //Variable declared as integer
unsigned int a[]={0xf3,0x12,0x163,0x133,0x192,0x1b1,0x1f1,0x13,0x1f3,0x1b3}; //integer array with numbers for display
int main()
{
IO0DIR=IO0DIR|0xffffffff; //Sets direction as output for PORT 0 pins
while(1)
{
for(i=0;i<=9;i++)
{
IO0SET=IO0SET|a[i]; //sets corresponding pins HIGH
delay(9000); //Calls delay function
IO0CLR=IO0CLR|a[i]; //Sets corresponding pins LOW
}
}
return 0;
}
void delay(int k) //Function for making delay
{
int i,j;
for(i=0;i
for(j=0;j<=1000;j++);
}









