搭建一种基于Simulink的双馈式感应发电机模型
双馈式感应发电机(DFIG)是在同步电机和异步电机的基础上发展起来的一种新型发电机。DFIG的主要优点是其足够宽的速度范围,能使组合式风力涡轮机以最佳的性能系数运行。
由于定子电压由电网施加,因此是不可控的,因此在dq域中建模DFIG的目的是通过dq域中转子电流或电压的两个解耦轴向分量来控制DFIG(其速度、电磁转矩等)。通常,选择d轴与转子漏磁空间矢量或定子电压方向对齐。在本项目中,定子电压vs的方向被选为d轴。

d轴的转速等于电空间中vs的转速,即:

假设定子电压由电网平衡的正弦三相电压施加:

我们可以通过调节ird来控制双馈发电机的定子实际功率Ps和电磁Tem,通过调节irq来控制双馈发电机的定子无功功率Qs。总之,d轴转子电流可用于控制定子有功功率和电磁转矩,q轴转子电流可用于控制定子磁链和定子无功功率。显然,它能够通过两个解耦部件ird和irq来控制DFIG,并且我们的控制目的是可以实现的。
参考信号可以从所需的电磁转矩(或所需的定子实际功率)和所需的定子无功功率中获得,如下所示:

基于Simulink搭建的DFIG模型如下图所示:
1、dq域双馈发电机模型

2、估计模型

3、带转子电压补偿的双馈发电机控制器模型

4、从Qs生成irq的模型

5、风力涡轮机模型
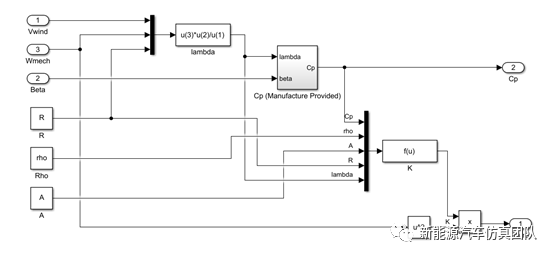
6、DFIG和风力涡轮机的组合

DFIG风力发电机相关参数设置:

仿真代码:
%% 双馈发电机的参数
f_rated = 60; % 额定频率;单位:赫兹
w_syn = 2*pi*f_rated; % 同步电转速;单位:拉德/秒
V_ll_rated = 690; % 额定线电压;均方根值;单位:V
p = 6; % 极点数
s = 0.01; % 在额定(满)负载下滑动
J = 70; % 惯性矩;单位:千克*m^2
R_s = 2e-3; % 定子下标s;单位:欧姆
R_r = 1.5e-3; % 定子下标r;单位:欧姆
X_ls = 50e-3;
X_lr = 47e-3;
X_m = 860e-3;
L_ls = X_ls/w_syn;
L_lr = X_lr/w_syn;
L_m = X_m /w_syn;
L_s = L_ls+L_m;
L_r = L_lr+L_m;
tau_r = L_r/R_r; % 指转子绕组的时间常数
sigma = 1-L_m^2/(L_s*L_r);
%% DFIG的初始(额定)条件
% 额定(满)负载下的转子转速
w_mech_rated = (1-s)*w_syn/(p/2);
% 定子额定电流,均方根值,单位:A
I_s_rated = V_ll_rated/sqrt(3) / (R_s + j*X_ls + j*X_m*(R_r/s+j*X_lr)/(j*X_m+R_r/s+j*X_lr));
% 额定转子电流,均方根值,单位:A
I_r_rated = -I_s_rated*j*X_m/(j*X_m+R_r/s+j*X_lr);
% 额定扭矩,P_额定/w_机械额定
T_em_rated = (3*abs(I_r_rated)^2*R_r*(1-s)/s) / w_mech_rated;
T_load_rated = T_em_rated;
% dq域中的电压
V_sd_rated = V_ll_rated;
V_rd_rated = 0;
V_rq_rated = 0;
% dq域中的定子电流
I_sd_rated = sqrt(3)*real(I_s_rated);
I_sq_rated = sqrt(3)*imag(I_s_rated);
% dq域中的转子电流
I_rd_rated = sqrt(3)*real(I_r_rated);
I_rq_rated = sqrt(3)*imag(I_r_rated);
Q_s_rated = (V_sd_rated)^2/(w_syn*L_s)+(L_m/L_s)*V_sd_rated*I_rq_rated;
fl_sd_rated = L_s*I_sd_rated + L_m*I_rd_rated;
fl_sq_rated = L_s*I_sq_rated + L_m*I_rq_rated;
fl_rd_rated = L_m*I_sd_rated + L_r*I_rd_rated;
fl_rq_rated = L_m*I_sq_rated + L_r*I_rq_rated;
%% 双馈发电机控制器参数
w_c_i = 10*2*pi; % 交叉频率
PM_i = pi/3; % PM
kpi_by_kii = (1/w_c_i)*tan(-pi/2+PM_i+atan(sigma*L_r*w_c_i/R_r));
kii = w_c_i*sqrt(R_r^2+(sigma*L_r*w_c_i)^2)/sqrt(1+(kpi_by_kii*w_c_i)^2);
kpi = kpi_by_kii * kii;
V_sd_prime_rated = V_rd_rated + s*w_syn*sigma*L_r*I_rq_rated;
V_sq_prime_rated = V_rq_rated - s*w_syn*sigma*L_r*I_rd_rated;
%% 风力机参数
A = 3904; % 扫掠面积,单位:m^2
R = 70.5/2; % 转子半径,单位:m
J_turb = 2.4*10^6; % 惯性矩,单位:kg*m^2
rho = 1.2; % 空气密度
v_wind = [12; 9; 6]; % 风速,单位:m/s
Cp_2 = @(lambda) 0.52*(116*(1-0.035*lambda)/lambda-5)*exp(-21*(1-0.035*lambda)/lambda)+0.0068*lambda;
% Seek Cp_opt and lambda_opt
Cp_opt = -inf;
lambda_opt = -inf;
iter = 1;
while true
lam = iter*0.01;
res = Cp_2(lam);
if ~isnan(res)
if res < Cp_opt
break;
else
lambda_opt = lam;
Cp_opt = res;
end
end
iter = iter + 1;
end


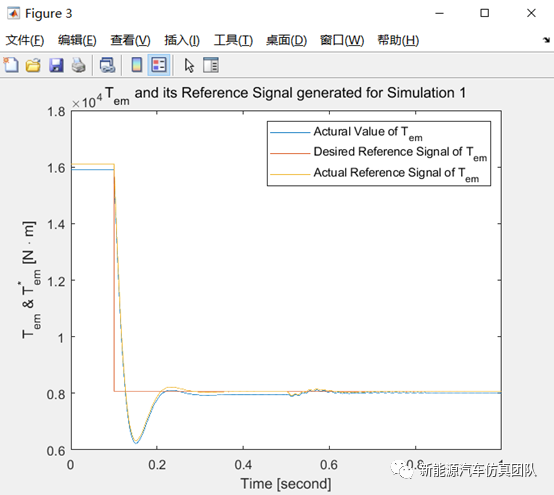
本文从理论上以及在MATLAB/Simulink中建立了双馈感应发电机(DFIG)和风力发电机在dq域的模型以及相关控制器的模型。仿真结果表明,所设计的控制器能有效地控制双馈风力发电机,并能自动调节施加在双馈风力发电机上的转子电压,从而使风力发电机在最佳状态下运行。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。