STM32F407 串口配置步骤
介绍STM32F407串口配置步骤,完成串口的数据发送与接收、实现中断接收,支持printf重定向。
STM32F407 串口配置说明
STM32F4 的串口资源相当丰富的,功能也相当强劲,STM32F407ZGT6 最多可提供 6 路串口,有分数波特率发生器、支持同步单线通信和半双工单线通讯、支持 LIN、 支持调制解调器操作、 智能卡协议和 IrDA SIR ENDEC 规范、具有 DMA 等。
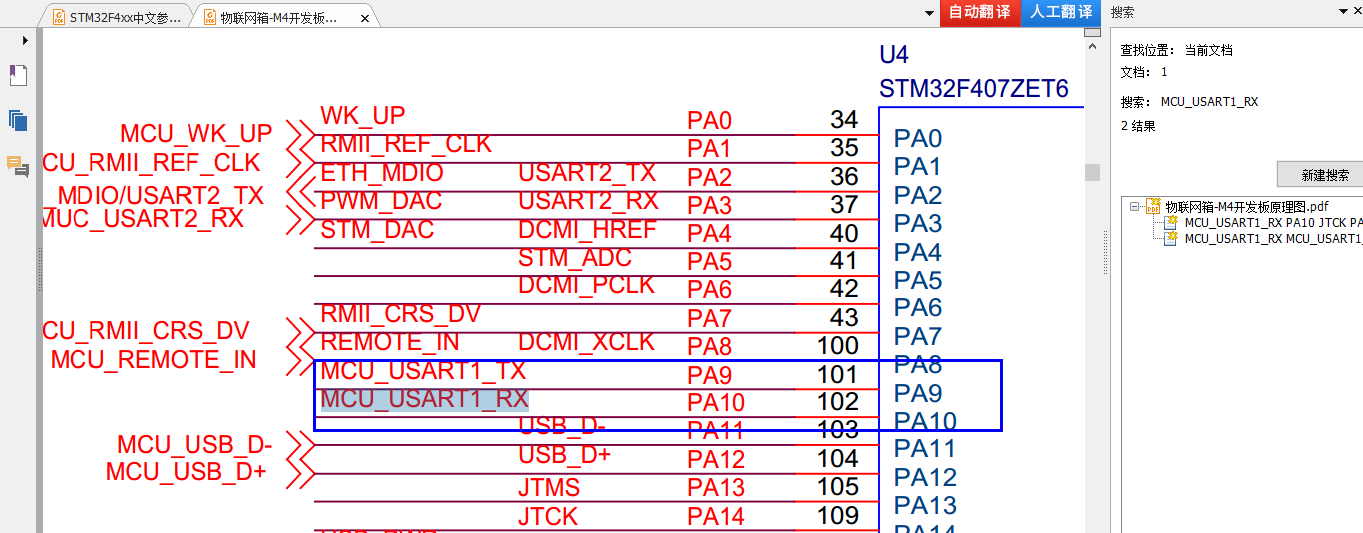
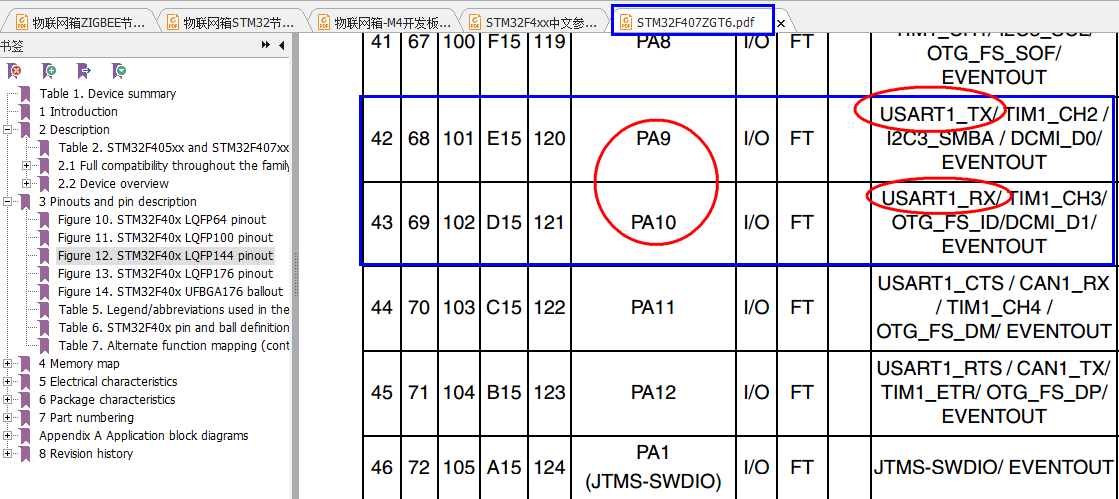
【1】串口硬件引脚分析

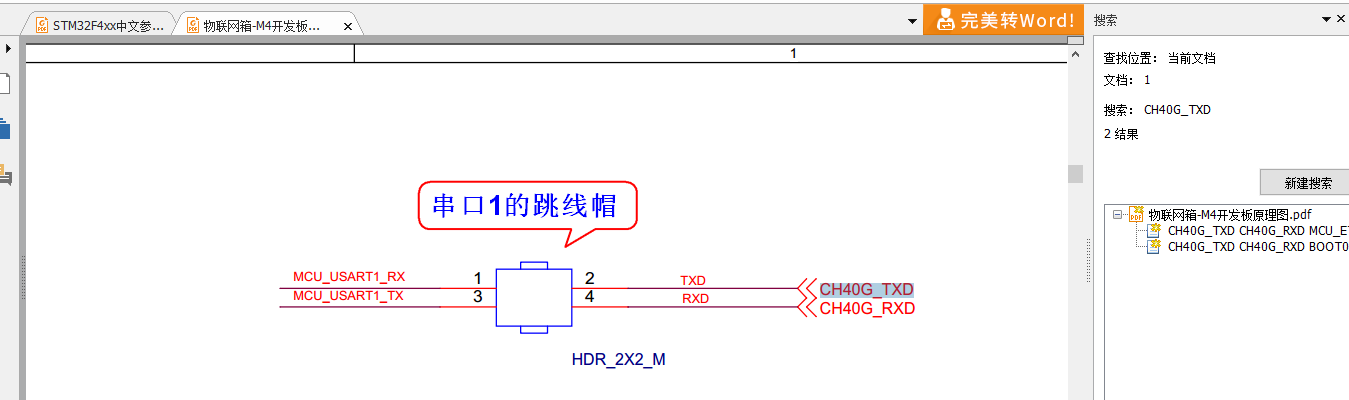
【2】串口复用引脚介绍
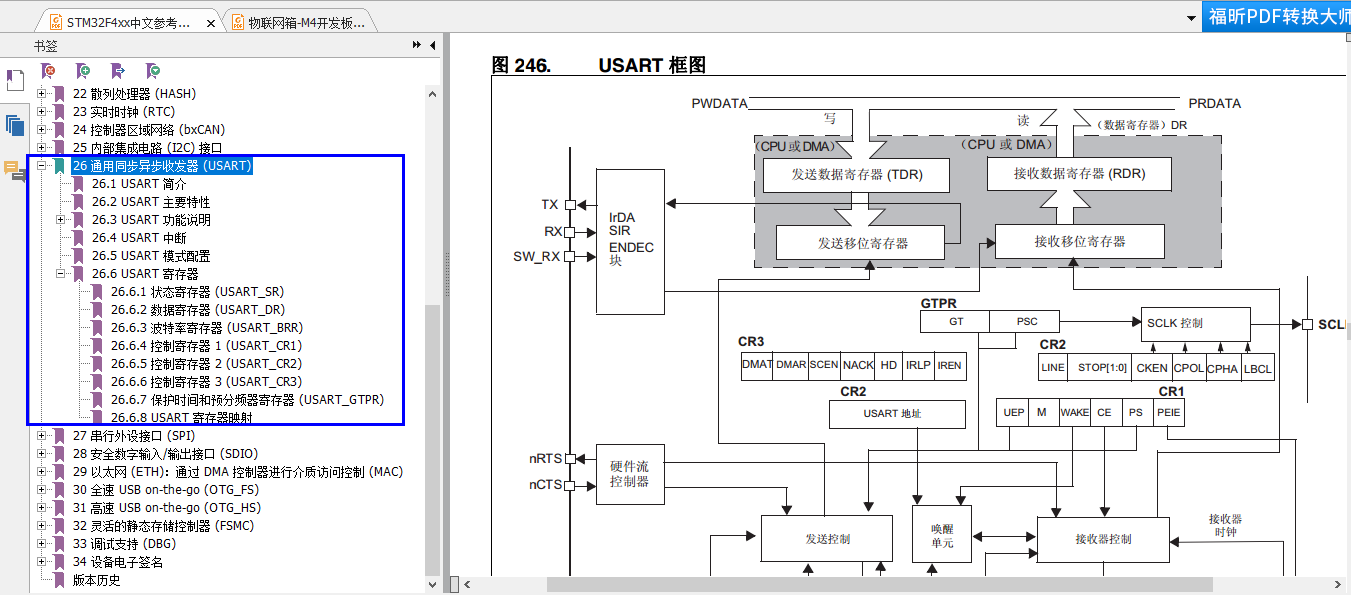
串口寄存器介绍在手册第26章
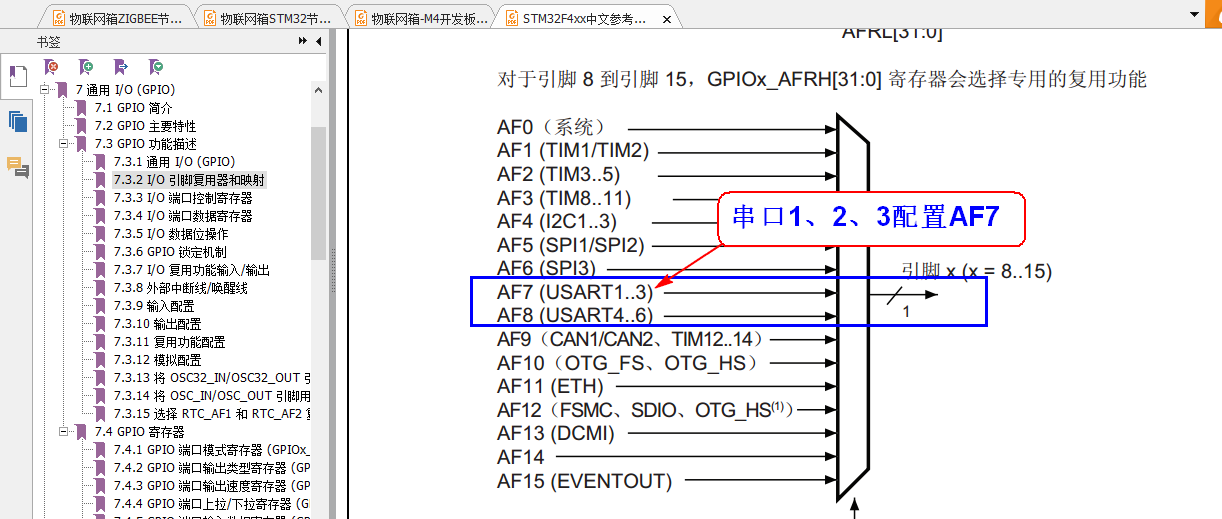
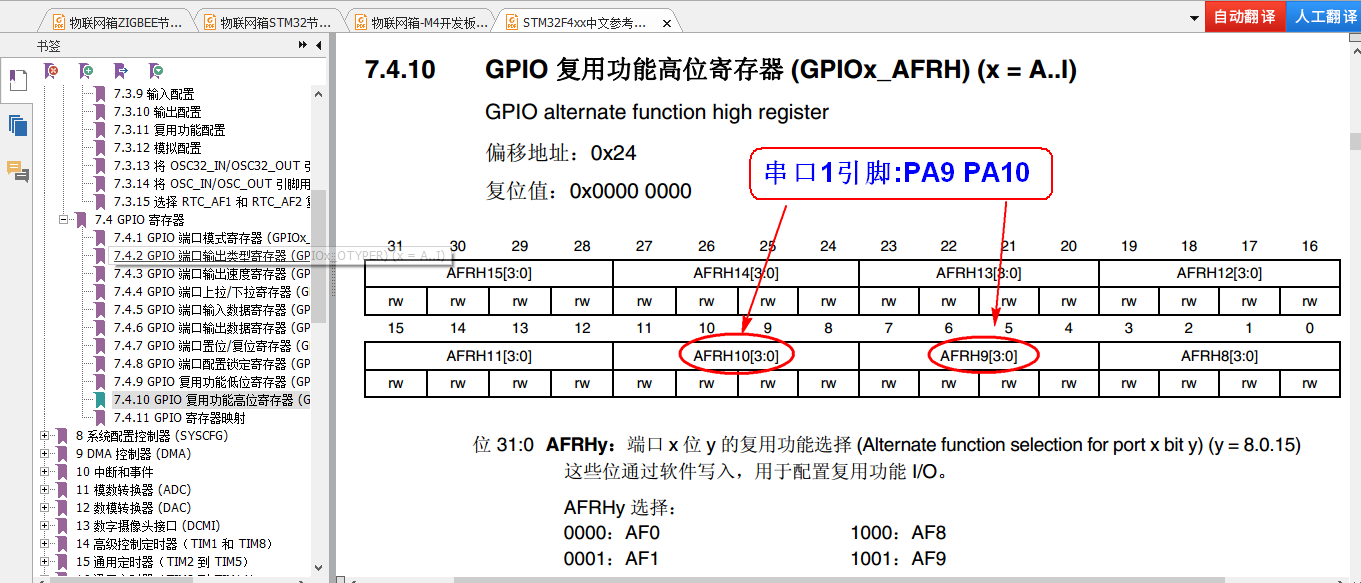
GPIO口复用功能引脚配置

F407串口对应的引脚
配置复用功能的寄存器
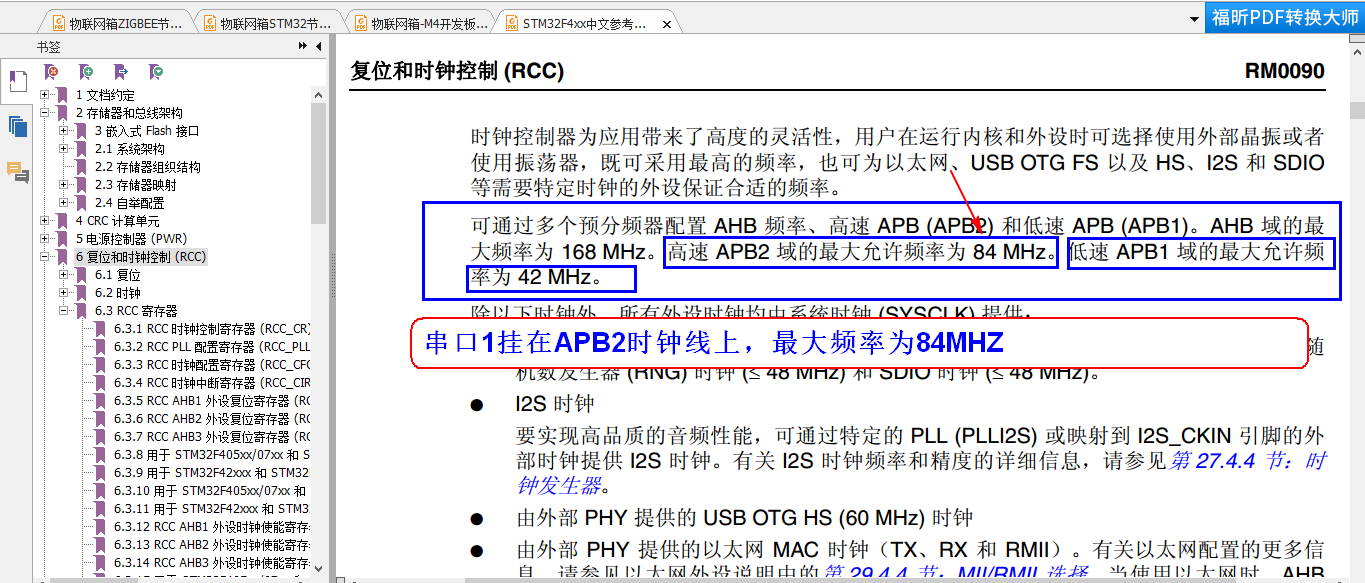
串口时钟频率配置分析
【3】串口1配置示例
Usart.c代码示例:
#include "usart.h"
/*
函数功能:串口1初始化
函数形参:
u32 clock :时钟频率(默认*1000000HZ) 注意:APB1最大时钟频率为42MHZ APB2最大时钟频率为84MHZ
u32 baud :波特率
硬件连接:
PA9--- >TX
PA10-- >RX
*/
void USART1_Init(u32 clock,u32 baud)
{
/*1. 开时钟*/
RCC- >AHB1ENR|=1< < 0;//使能PORTA时钟
RCC- >APB2ENR|=1< < 4;//使能USART1时钟
/*2. 复位串口时钟*/
RCC- >APB2RSTR|=1< < 4; //使能USART1复位时钟
RCC- >APB2RSTR&=~(1< < 4); //关闭USART1复位时钟
/*3. 配置GPIO口模式*/
GPIOA- >MODER&=~(0x3< < 9*2); //清除模式
GPIOA- >MODER|=0x2< < 9*2; //配置复用功能模式
GPIOA- >MODER&=~(0x3< < 10*2); //清除模式
GPIOA- >MODER|=0x2< < 10*2; //配置复用功能模式
GPIOA- >OTYPER&=~(0x1< < 9); //0表示推挽输出
GPIOA- >OSPEEDR&=~(0x3< < 9*2); //清除之前配置
GPIOA- >OSPEEDR|=0x2< < 9*2; //50MHZ输出速度
GPIOA- >PUPDR&=~(0x3< < 10*2); //清除之前配置
GPIOA- >PUPDR|=0x1< < 10*2; //配置上拉
GPIOA- >AFR[1]&=~(0xF< < 4*1); //清除PA9配置
GPIOA- >AFR[1]|=0x7< < 4*1; //配置PA9复用功能模式为串口1
GPIOA- >AFR[1]&=~(0xF< < 4*2); //清除PA10配置
GPIOA- >AFR[1]|=0x7< < 4*2; //配置PA10复用功能模式为串口1
/*4. 配置USART-CR寄存器*/
USART1- >BRR=(clock*1000000)/baud;//配置波特率
USART1- >CR1|=1< < 3; //使能发送
USART1- >CR1|=1< < 2; //使能接收,并开始搜寻RX引脚上的起始位
USART1- >CR1|=1< < 13; //USART模块使能。
}
/*
函数功能:串口字符串发送
函数形参:
USART_TypeDef *USARTx :串口的类型 (USART1 USART2 USART3)
u8 *str:将要发送的字符串
*/
void USARTxSendString(USART_TypeDef *USARTx,u8 *str)
{
while(*str!='�')
{
USARTx- >DR=*str;
while(!(USARTx- >SR&1< < 7)){} //等待发送完成
str++;
}
}
Usart.h代码示例
#ifndef USART_H
#define USART_H
#include "stm32f4xx.h"
void USART1_Init(u32 clock,u32 baud);
void USARTxSendString(USART_TypeDef *USARTx,u8 *str);
#endif
Main.c代码示例
#include "stm32f4xx.h" // Device header
#include "led.h"
#include "delay.h"
#include "key.h"
#include "usart.h"
int main(void)
{
u8 key,i,c;
LED_Init();
KEY_Init();
USART1_Init(84,115200);
while(1)
{
key=ScanKeyVal(0);
if(key)
{
i=!i;
LED0(i);
LED1(i);
USARTxSendString(USART1,"万邦易嵌嵌入式开发! ");
}
if(USART1- >SR&1< < 5) //接收到数据
{
c=USART1- >DR;
USART1- >DR=c; //将接收到的数据原路返回
}
}
}
【4】串口标准输入输出重定向
Usart.c文件增加代码:
#include "usart.h"
/*
函数功能:串口1初始化
函数形参:
u32 clock :时钟频率(默认*1000000HZ) 注意:APB1最大时钟频率为42MHZ APB2最大时钟频率为84MHZ
u32 baud :波特率
硬件连接:
PA9--- >TX
PA10-- >RX
*/
void USART1_Init(u32 clock,u32 baud)
{
/*1. 开时钟*/
RCC- >AHB1ENR|=1< < 0;//使能PORTA时钟
RCC- >APB2ENR|=1< < 4;//使能USART1时钟
/*2. 复位串口时钟*/
RCC- >APB2RSTR|=1< < 4; //使能USART1复位时钟
RCC- >APB2RSTR&=~(1< < 4); //关闭USART1复位时钟
/*3. 配置GPIO口模式*/
GPIOA- >MODER&=~(0x3< < 9*2); //清除模式
GPIOA- >MODER|=0x2< < 9*2; //配置复用功能模式
GPIOA- >MODER&=~(0x3< < 10*2); //清除模式
GPIOA- >MODER|=0x2< < 10*2; //配置复用功能模式
GPIOA- >OTYPER&=~(0x1< < 9); //0表示推挽输出
GPIOA- >OSPEEDR&=~(0x3< < 9*2); //清除之前配置
GPIOA- >OSPEEDR|=0x2< < 9*2; //50MHZ输出速度
GPIOA- >PUPDR&=~(0x3< < 10*2); //清除之前配置
GPIOA- >PUPDR|=0x1< < 10*2; //配置上拉
GPIOA- >AFR[1]&=~(0xF< < 4*1); //清除PA9配置
GPIOA- >AFR[1]|=0x7< < 4*1; //配置PA9复用功能模式为串口1
GPIOA- >AFR[1]&=~(0xF< < 4*2); //清除PA10配置
GPIOA- >AFR[1]|=0x7< < 4*2; //配置PA10复用功能模式为串口1
/*4. 配置USART-CR寄存器*/
USART1- >BRR=(clock*1000000)/baud;//配置波特率
USART1- >CR1|=1< < 3; //使能发送
#ifdef USART1_INTERRUPT
USART1- >CR1|=1< < 5; //开启串口接收中断
SetNVICPriorityGrouping(USART1_IRQn,1,3); //设置中断优先级
#endif
USART1- >CR1|=1< < 2; //使能接收,并开始搜寻RX引脚上的起始位
USART1- >CR1|=1< < 13; //USART模块使能。
}
/*
函数功能:串口字符串发送
函数形参:
USART_TypeDef *USARTx :串口的类型 (USART1 USART2 USART3)
u8 *str:将要发送的字符串
*/
void USARTxSendString(USART_TypeDef *USARTx,u8 *str)
{
while(*str!='�')
{
USARTx- >DR=*str;
while(!(USARTx- >SR&1< < 7)){} //等待发送完成
str++;
}
}
/*
函数功能:重写printf底层函数接口
*/
int fputc(int c,FILE *stream)
{
USART1- >DR=c; //发送一个字符
while(!(USART1- >SR&1< < 7)){}
return c;
}
/*
函数功能:重新scanf底层函数接口
*/
int fgetc(FILE *stream)
{
while(!(USART1- >SR&1< < 5)){}
return USART1- >DR;
}
/*
函数功能:串口1的中断服务函数
*/
void USART1_IRQHandler(void)
{
u8 data;
if(USART1- >SR&1< < 5)
{
data=USART1- >DR;
USART1- >DR=data;
}
}
Main.c代码示例
#include "stm32f4xx.h" // Device header
#include "led.h"
#include "delay.h"
#include "key.h"
#include "usart.h"
int main(void)
{
u8 i;
u8 buff[100];
LED_Init();
KEY_Init();
USART1_Init(84,115200);
while(1)
{
i=!i;
LED0(i);
LED1(i);
printf("STM32F407串口测试! ");
printf("请输入数据按回车键结束: (串口软件需要勾选发送新行) ");
scanf("%s",buff);
printf("你输入的数据为:%s ",buff);
}
}
第一步需要先编写设置中断优先级的函数:
sys.c代码示例
#include "sys.h"
/*
函数功能:设置NVIC中断控制器优先级
函数形参:
IRQn_Type IRQn:中断线
uint32_t PreemptPriority:抢占优先级
uint32_t SubPriority:次优先级
*/
void SetNVICPriorityGrouping(IRQn_Type IRQn,uint32_t PreemptPriority, uint32_t SubPriority)
{
uint32_t Priority;
NVIC_SetPriorityGrouping(NVIC_PriorityGroup_2); //设置优先级分组,每个工程只能设置一次
Priority=NVIC_EncodePriority(NVIC_PriorityGroup_2,PreemptPriority,SubPriority); //编码优先级
NVIC_SetPriority(IRQn,Priority); //设置优先级
NVIC_EnableIRQ(IRQn);
}
Sys.h文件代码示例:
#ifndef _SYS_H
#define _SYS_H
#include "stm32f4xx.h"
/*中断控制器分组*/
#define NVIC_PriorityGroup_0 ((uint32_t)0x700) /*!< 0 bits for pre-emption priority
4 bits for subpriority */
#define NVIC_PriorityGroup_1 ((uint32_t)0x600) /*!< 1 bits for pre-emption priority
3 bits for subpriority */
#define NVIC_PriorityGroup_2 ((uint32_t)0x500) /*!< 2 bits for pre-emption priority
2 bits for subpriority */
#define NVIC_PriorityGroup_3 ((uint32_t)0x400) /*!< 3 bits for pre-emption priority
1 bits for subpriority */
#define NVIC_PriorityGroup_4 ((uint32_t)0x300) /*!< 4 bits for pre-emption priority
0 bits for subpriority */
/**
@code
The table below gives the allowed values of the pre-emption priority and subpriority according
to the Priority Grouping configuration performed by NVIC_PriorityGroupConfig function
============================================================================================================================
NVIC_PriorityGroup | NVIC_IRQChannelPreemptionPriority | NVIC_IRQChannelSubPriority | Description
============================================================================================================================
NVIC_PriorityGroup_0 | 0 | 0-15 | 0 bits for pre-emption priority
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。