






 技术咨询
技术咨询 代买器件
代买器件 商务客服
商务客服 研发客服
研发客服基本指令是PLC最常用的指令,主要包括位逻辑指令、定时器指令和计数器指令
总述:位逻辑指令
在STEP 7-Micro/WIN SMART 软件的项目指令树区域,展开“位逻辑”指令包,可以查看所有的位逻辑指令,如图4-1所示。位逻辑指令有16条,可大致分为触点指令、线圈指令、立即指令、RS触发器指令和空操作指令。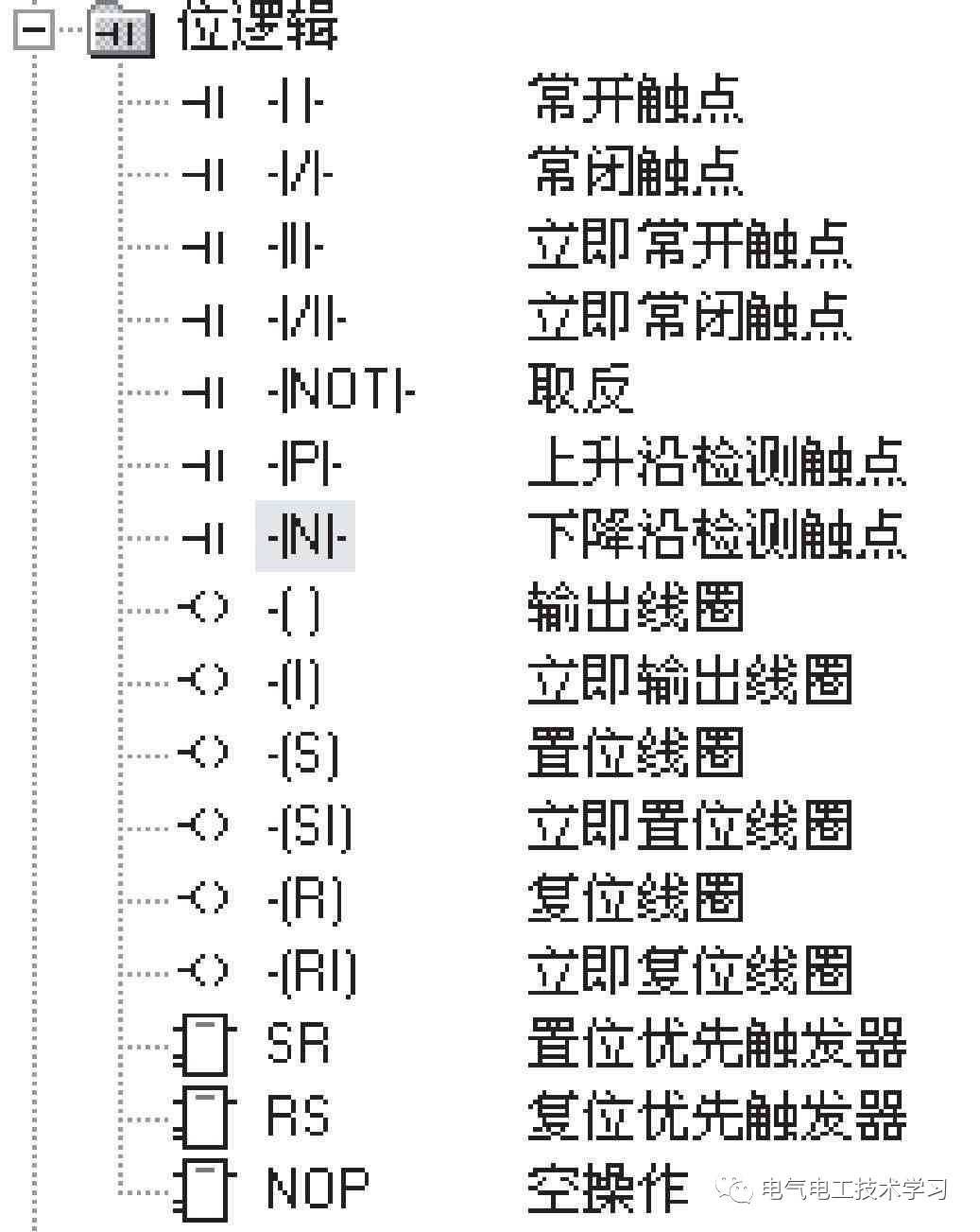
图4-1 位逻辑指令
一、 触点指令
触点指令可分为普通触点指令和边沿检测触点指令。
1.普通触点指令
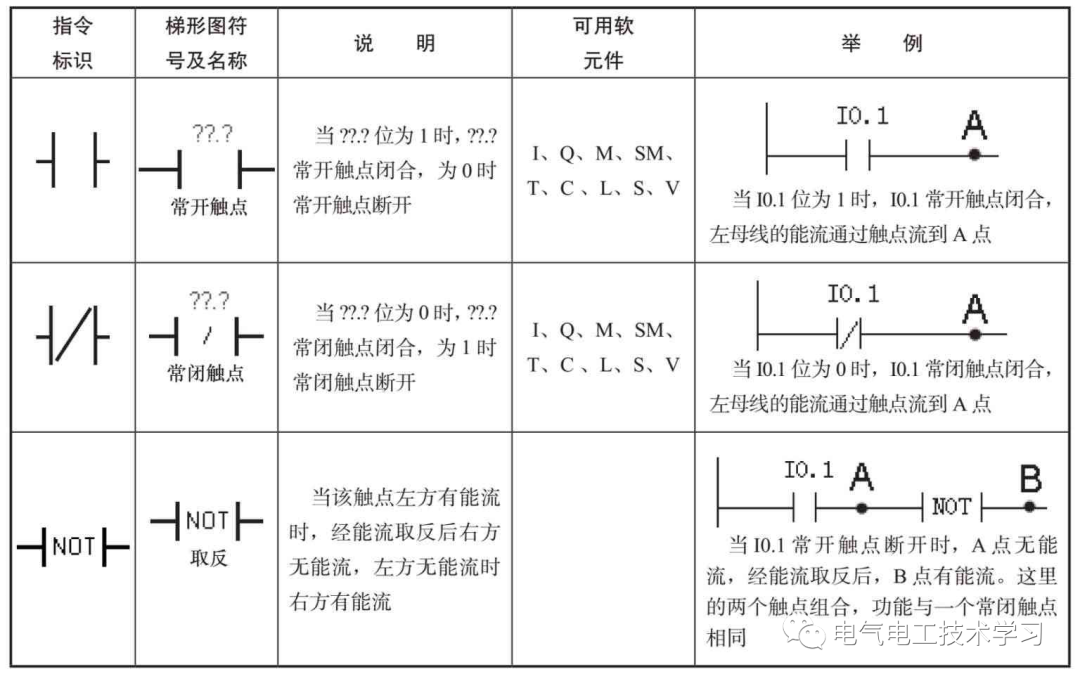
普通触点指令说明如表4-1所示。
表4-1 普通触点指令说明
2.边沿检测触点指令
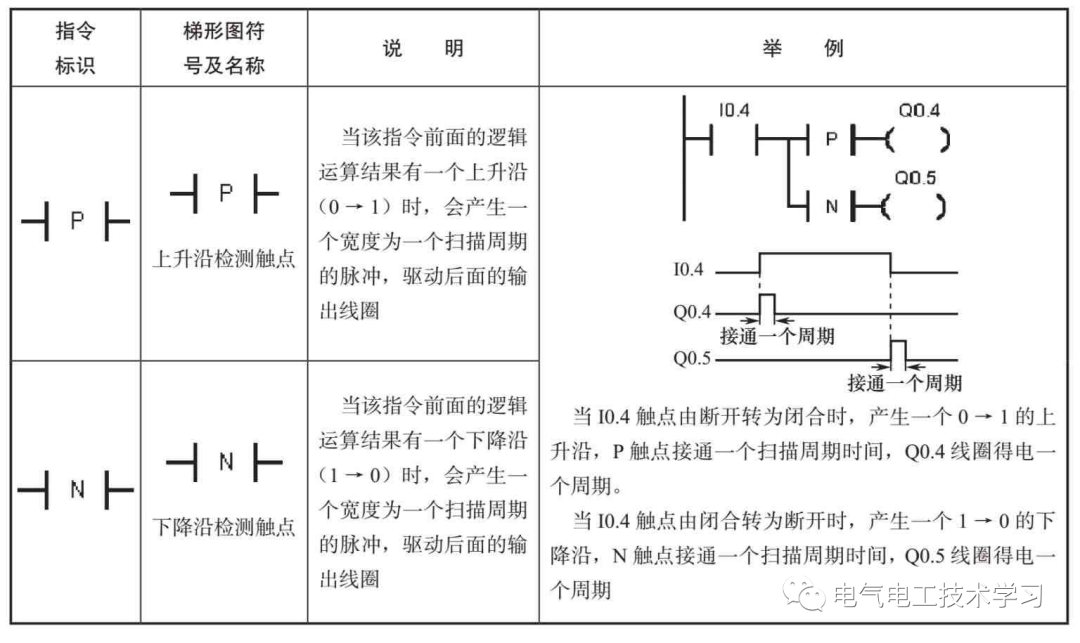
边沿检测触点指令说明如表4-2所示。
表4-2 边沿检测触点指令说明
二、线圈指令
1.指令说明
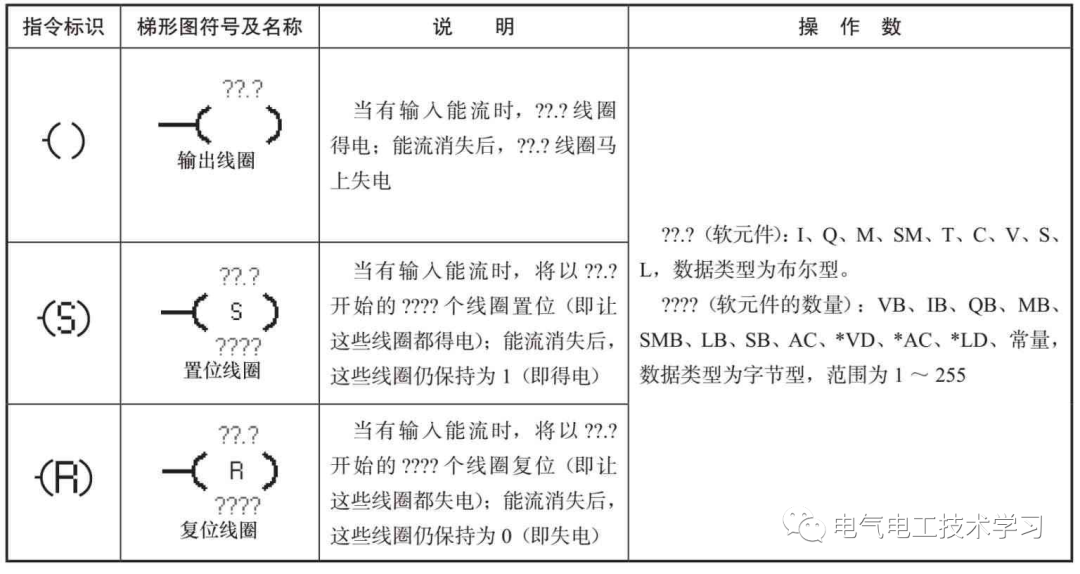
线圈指令说明如表4-3所示。
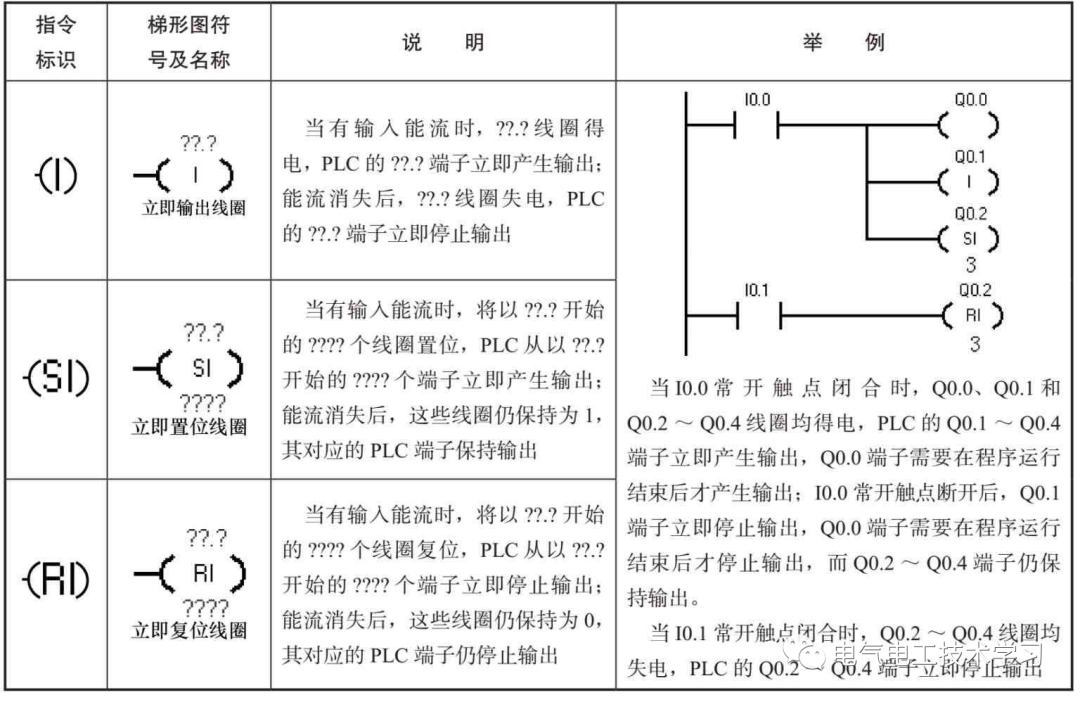
表4-3 线圈指令说明
2.指令使用举例
线圈指令使用如图4-2所示。当I0.4常开触点闭合时,将M0.0~M0.2线圈都置位,即让这3个线圈都得电,同时Q0.4线圈也得电;I0.4常开触点断开后,M0.0~M0.2线圈仍保持得电状态,而Q0.4线圈则失电。当I0.5常开触点闭合时,将M0.0~M0.2线圈都复位,即这3个线圈都失电,同时Q0.5线圈得电;I0.5常开触点断开后,M0.0~M0.2线圈仍保持失电状态, Q0.5线圈也失电。

图4-2 线圈指令使用
三、 立即指令
PLC的一般工作过程是:当操作输入端设备时(如按下I0.0端子外接按钮),该端端的状态数据“1”存入输入映像寄存器I0.0中,PLC运行时先扫描读出输入映像寄存器的数据,然后根据读取的数据运行用户编写的程序,程序运行结束后将结果送入输出映像寄存器(如Q0.0),通过输出电路驱动输出端子外接的输出设备(如接触器线圈),然后PLC又重复上述过程。PLC完整运行一个过程需要的时间称为一个扫描周期,在PLC执行用户程序阶段时,即使输入设备状态发生变化(如按钮由闭合改为断开),PLC也不会理会此时的变化,仍按扫描输入映像寄存器阶段读取的数据执行程序,直到下一个扫描周期才读取输入端新状态。 如果希望PLC工作时能即时响应输入或即时产生输出,可使用立即指令。立即指令可分为立即触点指令、立即线圈指令。
1.立即触点指令
立即触点指令又称立即输入指令,它只适用于输入量I。执行立即触点指令时,PLC会立即读取输入端子的值,再根据该值判断程序中的触点通/断状态,但并不更新该端子对应的输入映像寄存器的值,其他普通触点的状态仍由扫描输入映像寄存器阶段读取的值决定。
立即触点指令说明如表4-4所示。
表4-4 立即触点指令说明

2.立即线圈指令
立即线圈指令又称立即输出指令,该指令在执行时,将前面的运算结果立即送到输出映像寄存器而即时从输出端子产生输出,输出映像寄存器内容也被刷新。立即线圈指令只能用于输出量Q,线圈中的“I”表示立即输出。
立即线圈指令说明如表4-5所示。
表4-5 立即线圈指令说明
四、 RS触发器指令
RS触发器指令的功能是根据R、S端输入状态产生相应的输出,它分为置位优先触发器指令和复位优先触发器指令。
1.指令说明
RS触发器指令说明如表4-6所示。
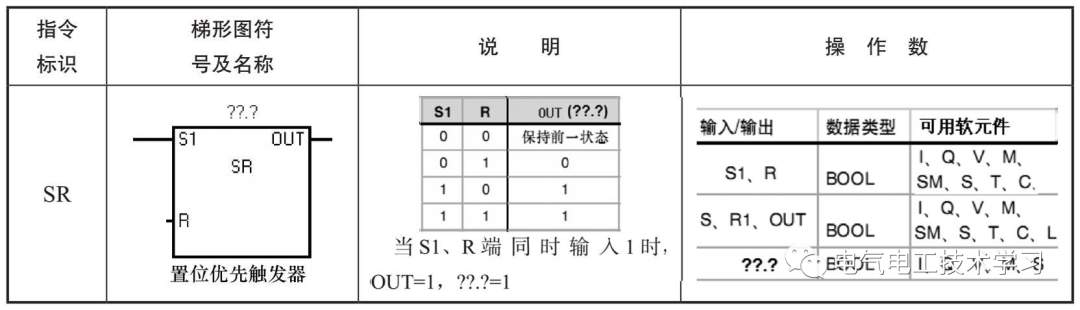
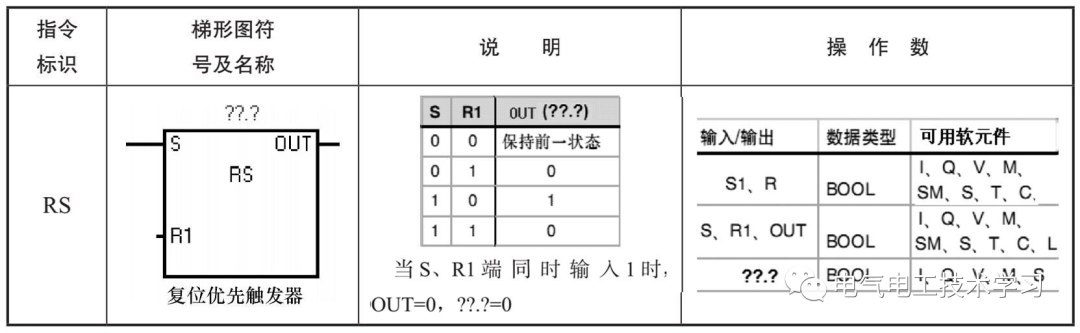
表4-6 RS触发器指令说明
2.指令使用举例
RS触发器指令使用如图4-3所示。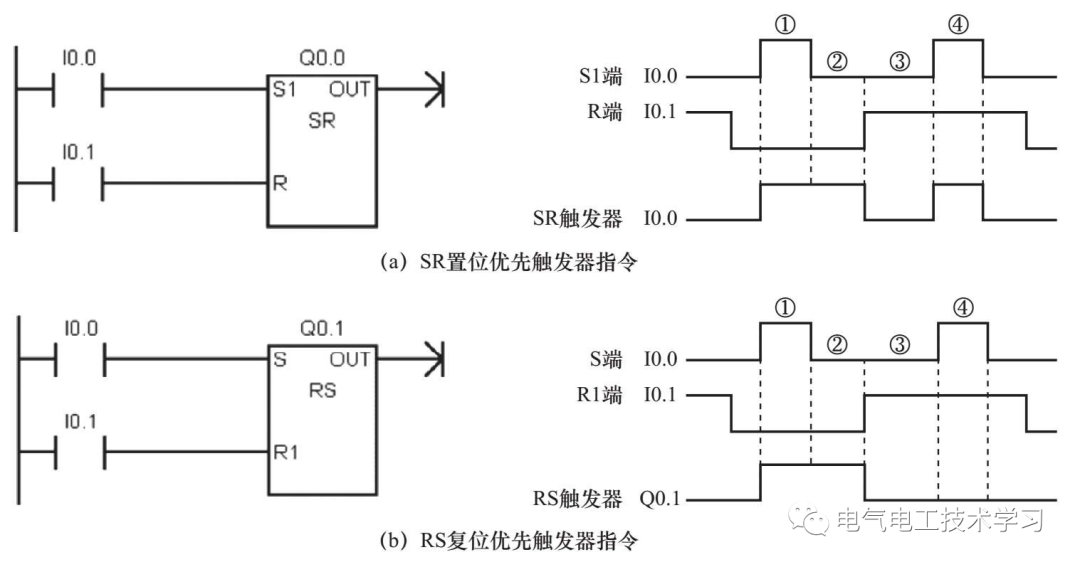
图4-3 RS触发器指令使用
图4-3(a)使用了SR置位优先触发器指令,从右方的时序图可以看出:
①当I0.0触点闭合(S1=1)、I0.1触点断开(R=0)时,Q0.0被置位为1;
②当I0.0触点由闭合转为断开(S1=0)、I0.1触点仍处于断开(R=0)时,Q0.0仍保持为1;
③当I0.0触点断开(S1=0)、I0.1触点闭合(R=1)时,Q0.0被复位为0;
④当I0.0、I0.1触点均闭合(S1=0、R=1)时,Q0.0被置位为1。
图4-3(b)使用了RS复位优先触发器指令,其第①~③种输入、输出情况与SR置位优先触发器指令相同,两者的区别在于第④种情况。
对于SR置位优先触发器指令,当S1、R端同时输入1时,Q0.0=1;对于RS复位优先触发器指令,当S、R1端同时输入1时,Q0.0=0。
五、空操作指令
空操作指令的功能是让程序不执行任何操作。由于该指令本身执行时需要一定时间,故可延缓程序执行周期。
空操作指令说明如表4-7所示。
表4-7 空操作指令说明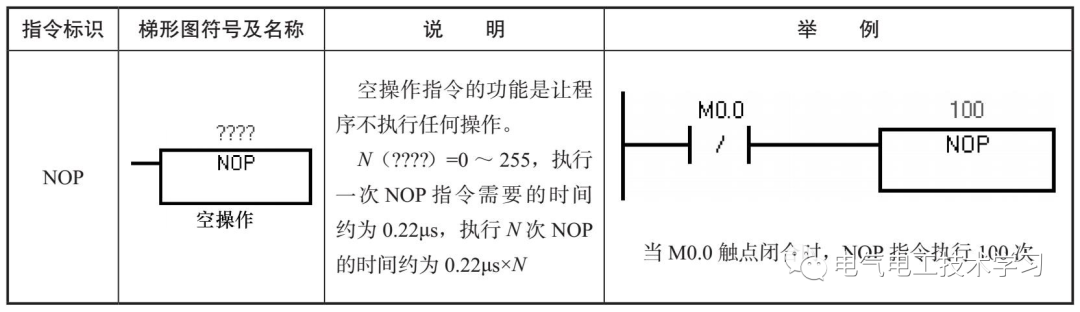
相关文章









