FB 467 FB_Motor_AMX_VR+FB 364 FB_SEW_AMX_VR
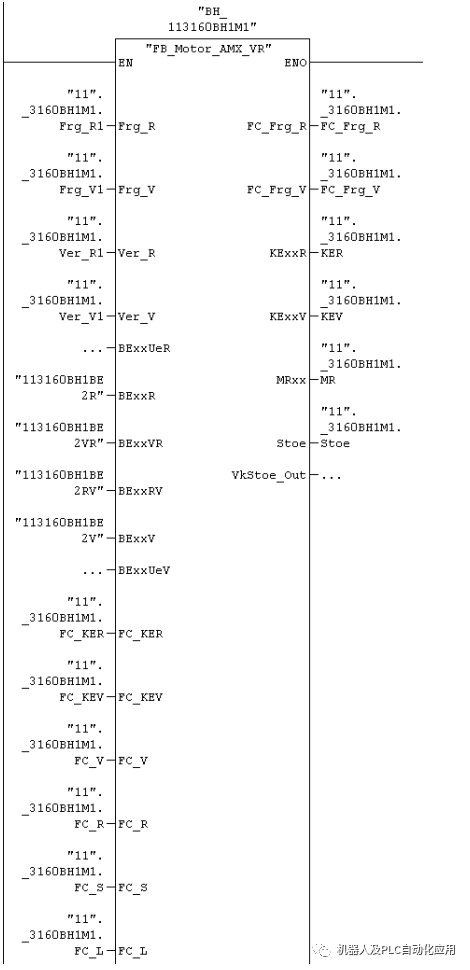
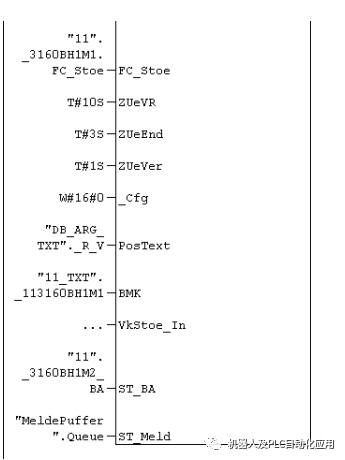
FB 467 FB_Motor_AMX_VR
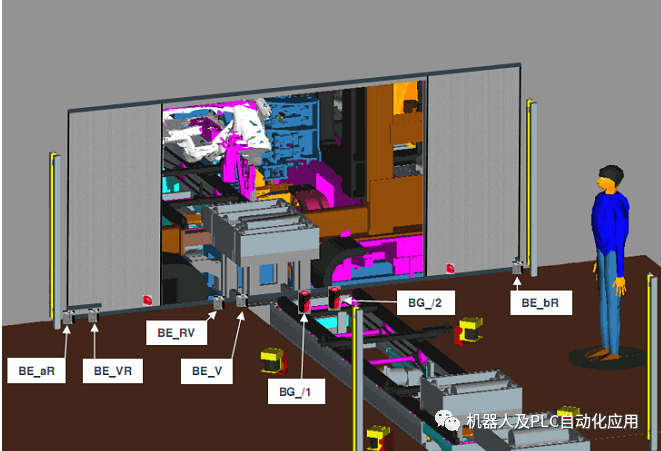
该模块用于对电机(转盘电机、对中电机等)和 FU 驱动装置的 FB_SEW_AMX_VR 进行控制(在运行模式 VR 时, MoviFit 带应用模块 AMX )。
输出
处于自动运行模式期间,如果未出现故障且已经出现了释放信号和相关联锁条件,则对输出实施控制。
如果没有故障、且出现了目标动作按钮及其相关设备联锁条件,则在手动模式对输出实施控制。
如果手动或自动控制条件已经满足,则选择相关输出以对驱动装置进行控制,直至输出了驱动装置的当前末位位置。
监控的错误类型如下:
1. 故障脱扣:故障指示,是否同时出现一个以上清洗程序(只适用自动运行模式)。
2. 命令控制发送器出现故障:如果同时出现一个以上末位位置,则发出错误消息。因此,提供有时间延时 ZUeVer 。该错误消息可采用组态字的 Bit01 进行隐藏。
3. 无控制地离开末位位置:离开末位位置且未出现使能信号时,将生成一条故障消息。因此,提供有时间延时 ZUeVer 。
4. 未离开末位位置:不离开末位位置(即使出现了某个控制信号)时,将产生一条错误消息。因此,提供了时间延时 ZueEnd 。
5. 运动监控时间:如果在监控时间 ZUeVR 内未到达该位置,将生成一条错误消息。该错误消息可采用上述组态字的 Bit02 进行隐藏。
错误监控
全部错误消息都通过 FB_Message_4 或 FB_Message_10 模块发送给消息系统。这种情况下,对于每个错误消息,均提供错误位和错误文本。此外,源名称也以该块上类型为 String 的输入参数 BMK 进行参数化。
错误位出现上升沿时,发送错误消息;出现下降沿时,对其进行确认。
循环时间测量
该模块对前向行进和反转动作进行运行时测量,并将测量结果以 LZ0 消息的方式发送给 FB_Message_4 模块。此时,输入参数 Frg_Lzm 被设置成 TRUE 。
可视化的键
该模块对位置按钮 1-2 的按键操作进行评估;评估结果以值 1 和 2 写入到可视化功能的变量 bVisuButtons 中。
准备可视化数据
全部位置值和控制系统都汇总在双字中。按钮的标签,从 String 型变量 'PosText' 中读出,并写入到 String 型变量 'sVisuText1' 和 'sVisuText2' 中。这些变量被标记为 OPC 数据,用于可视化显示。
FB 364 FB_SEW_AMX_VR
采用该函数块,可以利用功能级 SEW MOVIFIT FC“ 工艺”和 PROFINET 对电机实施控制。据此,SEW 可将应用模块 AMX1001 切换成操作模式:V/R 模式可以激活和禁用微动模式。
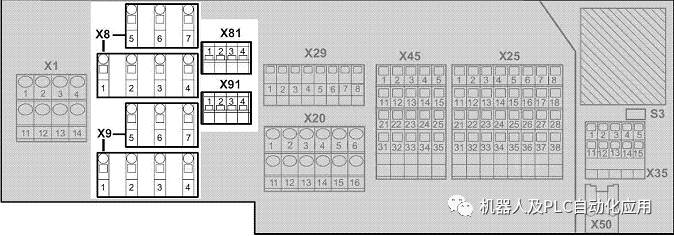
电机连接
注意:
从表格“引擎”(engines) 中将引擎分配给 MOVIFIT-FC 工艺后,才允许执行直接启动。
FB_SEW_AMX_VR 是一种驱动器模块,可用于 MOVIFIT-FC 工艺和应用模块 SEW AMX1001 的操作模式:V/R 模式。
Movifit 参数化
通过激活 MOVIFIT-FC 变频器,可在两种启动模式之间进行选择:
采用 DIP 开关 S10, 可在 “ 简捷模式”(Easy-Mode) 模式中快速、方便地让 MOVIFIT-FC 投入运行。
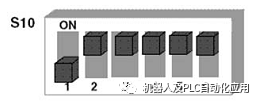
将 DIP 开关 S10/1 切换到“ 打开”(ON) 位置,可让设备运行于“ 专家模式”(Expert-Mode) 。该模式允许采用范围经过扩展的参数。采用软件工具 "MOVITOOLS MotionStudio" 可根据应用调整这些参数(功能级“ 经典”(Classic) 和“ 工艺”(Technology))。
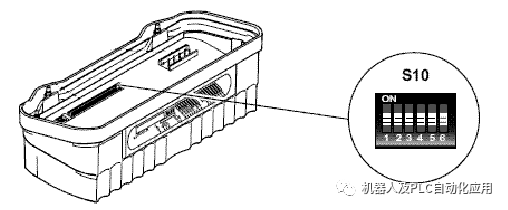
要采用应用模块 AMB1001 (FB_MOVIFIT_AMB) 操控 MOVIFIT-FC,通常必须激活“ 专家模式”(Expert-Mode) 。(DIP 按钮 S10/1 = ON)
设备参数的调整,可采用软件工具 "MOVITOOLS MotionStudio" 在“专家模式”(Expert-Mode) 中进行:
过程数据输入 MOVIFIT + 应用
|
PE1 |
状态字 | WORD | Bit 0:1 = 维护开关已激活(网络已断开) Bit 1:1 = 心跳位(切换) Bit 2:保留 Bit 3:保留 Bit 4:1 = 数据集可用 Bit 5:1 = 已组态自动重新加载 Bit 6:1 = 警告 Bit 7:1 = 系统错误 Bit 8..15:状态( 系统错误 = 0) 或故障代码(系统错误 = 1) |
| PE3 | E-Word | WORD | Bit 0: 变频器正在运行 Bit 1:识别到启动 Bit 2:快速运行处于活跃状态 Bit 3:微动处于活跃状态 Bit 4: Bit 5: 变频器错误 0 = i.O./ 1 = 错误或警告 Bit 6:在右侧位置 Bit 7:在左侧位置 Bit 8..15:设备状态 ( 错误 /警告 = 0) 或错误码 ( 错误 /警告 = 1) |
过程数据输出 MOVIFIT + 应用
| PA1 | 控制字 | WORD | Bit 0:下载数据集 Bit 1:上传数据集 Bit 2:上传数据集且自动重新加载 Bit 3:仿真模式已关闭 Bit 4:自动组态已关闭 Bit 5:保留(重新启动应用) Bit 6:重新启动系统 Bit 7:保留 Bit 8..15:保留 |
| PA3 | A-Word | WORD | Bit 0:控制器锁定/释放 0 = 释放/ 1 = 锁定控制器, 激活制动器 Bit 1:释放/紧急停机 0 = 出现紧急斜坡时停机 / 1 = 释放 Bit 2:释放/停机 0 = 出现停机斜坡时停机 / 1 = 释放 Bit 3:保留(保留位必须设置为 0) Bit 4:保留 Bit 5:保留 Bit 6:错误复位 Bit 7:运行速度/ 微动模式 0 = 微动模式 / 1 = 运行速度 Bit 8:启动 Bit 9:前进/正转/ 顺时针方向旋转 Bit10:后退/反转/ 逆时针方向旋转 Bit11:模式 2^0 Bit12:模式 2^1 Bit13:模式 2^2 Bit14:保留 Bit15:不释放驱动器时的制动器通风排气 模式: 000 = 模式 0:保留 001 = 模式 1:微动操作 010 = Mode 2:馈入 011 = 模式 3:馈出 100 = 模式 4:V/R 101 = 模式 5:保留 110 = 模式 6:保留 111 = 模式 7:保留 |

模块的配置
V/R V/R 操作模式
点动操作模式
独立功能操作类型
错误消息
可视化的键
V/R V/R 操作模式
在操作类型 V/R 中,满足以下条件时驱动器将旋转:
已经释放了自动操作模式 BA_Struct.K26_FrAuto
MOVIFIT-FC 进入就绪状态
驱动装置无故障 Stoe
释放向前 Frg_V 处于活跃状态且没有 BExV 起动器电机正转 或
释放后退 Frg_R 处于活跃状态且没有 BExR 起动器电机反转
如果全部启动条件都满足,驱动器将采用 SEW 应用中调整的斜坡加速至 Drehzahl_Schnell。
若其中一个启动条件不满足,驱动器将采用 SW 应用中调整的斜坡减速直至完全停止。
点动操作模式
在该操作类型中,满足以下条件时驱动器将旋转:
采用 KWE7 释放了操作模式 Hand BA_Struct.K25_FrHand
MOVIFIT-FC 进入就绪状态
驱动装置无故障 Stoe
释放点动模式 BA_Tipp 处于活跃状态
根据信息页面上的预选说明,选择或去选了点动操作。切换至自动操作模式或未操作 KWE7 时,将自动取消选择点动模式。
在点动模式时,按下键 V 或 R,可让驱动向前或向后行进。驱动器按采用 SEW 应用设置的斜坡和速度进行旋转。
独立功能操作类型
所选参数集中的旋转或斜坡标准值,由 FB_MOVIFIT_FC 进行监控并限制在最小和最大限值之间。
如果驱动未被释放,则通过设置 Frg_BrLoe 输出,可对制动输出进行控制,从而释放制动器。
如果在 V/R 模式中设置了前向行进,即以正确的顺序激活了启动器,则 Pos_V 输出被激活。发出后退定位时,将会再次清除 Pos_V 输出。
如果在 V/R 模式中设置了后向行进,即以正确的顺序激活了启动器,则 Pos_R 输出被激活。发出前向定位时,Pos_R 输出被再次清除。
如果驱动器已被释放,且该制动器输出已经激活,则根据预先选择的旋转方向打开 FC_V 或 FC_R。MOVIFIT-FC 没有真正的返回消息“电机正在运行”。
驱动器会将实际旋转状态(运行速度或微动速度)返回给输出 FC_S 或 FC_L 。
可视化的键
该模块对按钮的代码提示、前向行进提示和后退行进提示进行评估。按下按钮时,这些提示信息以值 1 、2 和 3 的形式被写入到可视化功能的变量 bVisuTasten 中。