随着自动驾驶和车联网技术的发展,车载网络正在快速发展,推动了汽车行业的发展。它需要支持更多功能来提高效率、安全性,当然还包括驾驶体验。因此,对数据带宽和电缆数量的要求;以及复杂性、灵活性和成本效益等因素将会变得更具挑战性。
为了实现自动驾驶,必须在汽车上很好地集成各种技术。这包括远程雷达、短程/中程雷达、激光雷达、摄像头、超声波传感器和 GPS,所有这些都以不同的数据速率和通信协议运行。因此,这些去中心化的网络结构正日益演变为集中式网络架构。
汽车以太网正在成为未来车载网络的首选。那么,它是什么,它将如何影响当前的网络架构?
为什么选择汽车以太网?
汽车以太网是新的物理层标准,使用以太网标准作为车载网络技术。它具有高抗扰度、减少布线和高速数据速率等特点。高抗扰度和减少布线是帮助将以太网引入车载应用的两大创新。如果没有高抗扰度能力,我们熟悉的标准以太网,100Base-T和100Base-TX将无法承受车内恶劣的电磁干扰环境。
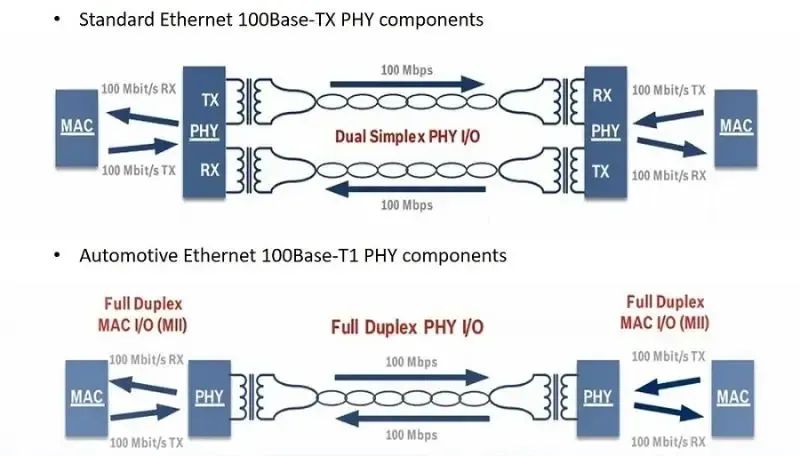
图1.双单工物理层 I/O 与全双工物理层 I/O
图 1 显示了物理层 (PHY)的概述。标准以太网 100Base-Tx 是具有 2 对双绞线的双单工配置。相比之下,汽车以太网 100Base-T1 是具有单根双绞线的全双工链路,可以在每个方向上传输每秒 100 兆比特 (Mbps)。这意味着理论上节点之间可以进行200 Mbps的通信。在1000Base-T1上也可以看到同样的改进。
当您将以太网速度与以每秒比特或每秒千比特的速度运行的 CAN、CAN-FD、LIN 和 FlexRay 的速度进行比较时,它们存在巨大差异。这清楚地显示了汽车以太网的优势,它可以满足自动驾驶汽车(AGV)对带宽的更大需求。
网络架构设计变更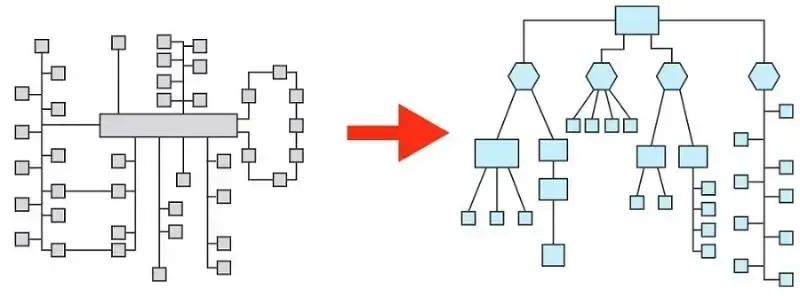
图2.异构网络到分层同构网络
现在,让我们看看汽车以太网如何影响网络架构的发展。
图 2 中的左图显示了异构网络。网络的右侧可能是其环形拓扑中的 MOST 网络。网络的左侧可以是CAN或CAN-FD总线,其中多个节点可以直接访问总线。这被认为是只有单一通信级别的经典拓扑。子网之间的所有通信都可以由中央网关直接管理。另一方面,图2的右图是分层同构网络,最底层是CAN、CAN-FD、LIN和FlexRay等经典通信技术。网络的第二层(图中用六边形表示)是以太网和经典技术之间的中间网关。顶层的矩形可以是交换机或仅具有以太网端口的设备。这是为了能够以更灵敏的方式与所有网络进行通信。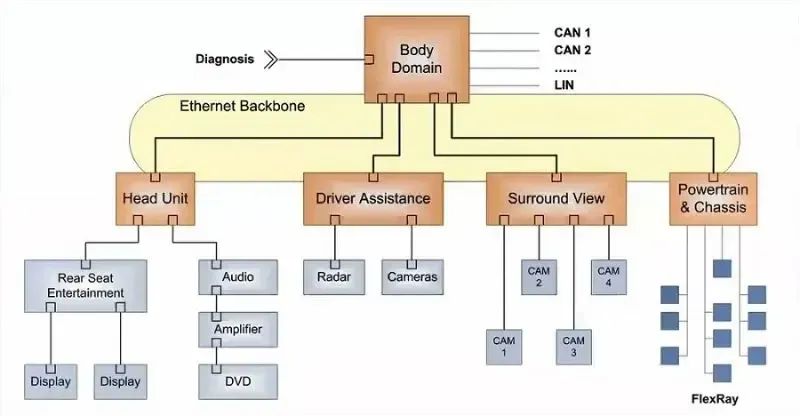
图3.以太网作为骨干网
图 3 说明了分层同构网络的应用。我们有主机,驾驶辅助系统,环视以及动力总成和底盘,域间网关将经典技术转换为以太网。不同技术(也称为以太网主干)之间的这些转换允许子单元及其中间网关连接到支持以太网的中央网关。以每秒一千兆位的速度实现汽车以太网的愿景已经成为现实,许多OEM都使用这种架构作为其以太网骨干。
不断发展的汽车网络架构
网络架构将需要变得与车型相关,因为低端和高端车辆有不同的需求。汽车以太网目前不会取代所有的网络需求,而是会与经典的总线网络长期共存。这是因为成本是阻碍汽车以太网更广泛应用的一个关键因素。经典技术,如 CAN、CAN-FD 和 LIN,已经很成熟且具有成本效益。它们将继续应用在特定的应用领域,特别是那些低成本和低带宽设计规范的领域。
随着汽车连接与通信技术的不断发展与增强,网络安全将需要成为一个重要的设计考虑因素。与 CAN 相比,汽车以太网安全性是复杂的,需要专业知识和专门的中央管理。一个更彻底和有效的网络安全解决方案需要与网络设计同时开发。