VPLC532E机器视觉运动控制一体机功能分析
应用背景
运动控制器正朝着高速度、高精度、开放式的方向发展,不仅对运动控制功能精益求精,还增加了视觉相关的定位、测量、检测和识别等,多种功能的穿插使用进一步增加了在编程设计代码时的复杂程度。
为了给客户提供更好地软件框架,简化程序结构、节省内存空间、提高代码可读性。
正运动技术在VPLC532E机器视觉运动控制一体机上增加了结构体功能,方便客户在大型项目上更高效的进行项目开发。
VPLC532E是正运动推出的一款EtherCAT视觉总线控制器,控制器集成了2个千兆以太网以及2个USB3.0、2个USB2.0接口,支持多种工业相机,支持多种视觉功能和复杂的运动控制功能。
VPLC532E硬件介绍
1.集成RS232、RS485、CAN接口、2路USB3.0、2路USB2.0接口。
2.2路千兆EtherNet、1路百兆EtherCAT、6个本地轴接口。
3.24进12出数字IO,其中4路高速输出,4路高速输入、2路模拟量输出。
4.支持市场主流的USB3.0相机与GigE相机。
VPLC532E功能介绍
1.支持最多达32轴直线插补、任意空间圆弧插补、螺旋插补、样条插补。 2.支持电子凸轮、电子齿轮、位置锁存、同步跟随、虚拟轴等功能。 3.支持硬件比较输出(HW_PSWITCH2),硬件定时器,运动中精准输出。 4.支持脉冲闭环,螺距补偿等功能。 5.支持ZBasic多文件多任务编程。 6.多种程序加密手段,保护客户的知识产权。 7.掉电检测,掉电存储。 实现指令 1.STRUCTURE -- 结构体定义 Structure 结构名称 Dim 成员1名称 [As数据类型1] ... ... Dim 成员n名称[(数组长度)] [As数据类型1] End Structure
2.FLASH_WRITEDBL -- flash存储-double
FLASH_WRITEDBL sect_num [, varname] [, arrayname] [, arrayname(a)] [, arrayname(a,length)]
sect_num:flash块编号,不同类型不一样。
varname:变量名。
arrayname:数组名,可以为TABLE,VR,MODBUS。
a:操作的数组索引。
length:操作的数组元素个数。
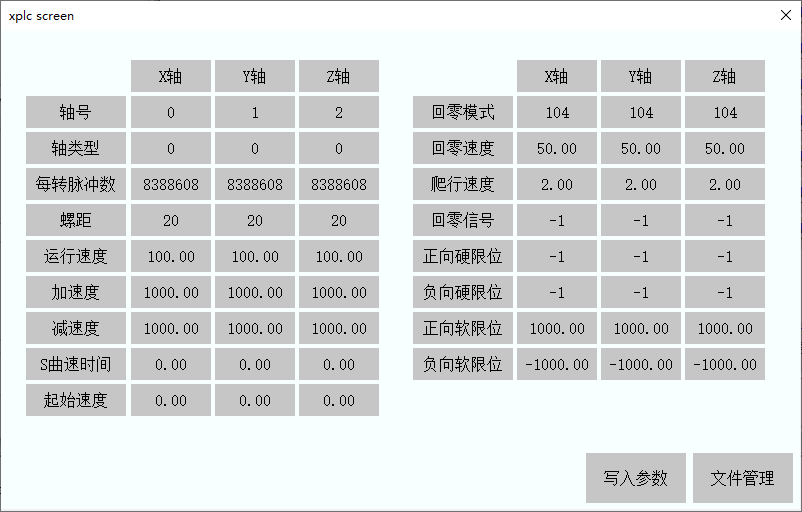
结构体应用例程 该例程主要是对三轴的机械参数和配方文件以结构体框架来实现,通过结构体变量嵌套使用来减少变量,降低内存占用,提高代码的可复用性。
1.创建结构体变量
GLOBAL SUB HMI_INIT()
GLOBAL gv_CurParamNum '当前配方号
gv_CurParamNum=0
GLOBAL gv_PageNum '页码
gv_PageNum=0
GLOBAL CONST gv_SysMaxAxis=3 '最大轴数
GLOBAL STRUCTURE AxisParam
'''轴参数
DIM No '轴号
DIM AxisAtype '轴类型
DIM AxisDpos '轴的当前位置
DIM OnePulses '轴电机一圈脉冲数
DIM AxisPitch '轴螺距
DIM AxisSpeed '轴的运动速度
DIM AxisAccel '轴的加速度
DIM AxisDecel '轴的减速度
DIM AxisSramp '轴的S曲线时间
DIM AxisLspeed '轴的起始速度
DIM FsLimit '轴正限位
DIM RsLimit '轴负限位
'''回零参数
DIM DatumMode '轴回零模式
DIM BackZeroSpeed '轴的回零速度
DIM AxisCreep '轴的回零第2段速度
DIM DatumIn '轴原点信号
DIM FwdIn '轴正限位信号
DIM RevIn '轴负限位信号
END STRUCTURE
GLOBAL STRUCTURE SysParam
DIM SysAxis(gv_SysMaxAxis) AS AxisParam '系统轴数
DIM FileName(50) '参数文件名
END STRUCTURE
GLOBAL gs_SysParam(50) AS SysParam '定义系统结构体变量
LOCAL lv_i
FOR lv_i=0 to gv_SysMaxAxis-1
'初始化轴参数变量
gs_SysParam(0).SysAxis(lv_i).No=lv_i
gs_SysParam(0).SysAxis(lv_i).AxisAtype=0 '轴类型
gs_SysParam(0).SysAxis(lv_i).OnePulses=8388608 '轴电机一圈脉冲数
gs_SysParam(0).SysAxis(lv_i).AxisPitch=20 '轴螺距
gs_SysParam(0).SysAxis(lv_i).AxisSpeed=100 '轴的运动速度
gs_SysParam(0).SysAxis(lv_i).AxisAccel=1000 '轴的加速度
gs_SysParam(0).SysAxis(lv_i).AxisDecel=1000 '轴的减速度
gs_SysParam(0).SysAxis(lv_i).AxisSramp=0 '轴的S曲线时间
gs_SysParam(0).SysAxis(lv_i).AxisLspeed=0 '轴的起始速度
'初始化回零参数变量
gs_SysParam(0).SysAxis(lv_i).DatumMode=104 '轴的回零模式
gs_SysParam(0).SysAxis(lv_i).BackZeroSpeed=50 '轴的回零速度
gs_SysParam(0).SysAxis(lv_i).AxisCreep=2 '轴的回零第2段速度
gs_SysParam(0).SysAxis(lv_i).DatumIn=-1 '轴的回零信号
gs_SysParam(0).SysAxis(lv_i).FwdIn=-1 '轴的正向硬限位信号
gs_SysParam(0).SysAxis(lv_i).RevIn=-1 '轴的负向硬限位信号
gs_SysParam(0).SysAxis(lv_i).FsLimit=1000 '轴正限位
gs_SysParam(0).SysAxis(lv_i).RsLimit=-1000 '轴负限位
'初始化参数文件
gs_SysParam(0).FileName="NONE" '初始化参数文件名
NEXT
FOR lv_i=0 to 49
gs_SysParam(lv_i)=gs_SysParam(0) '初始化其他配方参数
NEXT
ENDSUB
2.保存配置文件
GLOBAL SUB SaveCurParam()
LOCAL iflsflag
iflsflag=70214733
FLASH_WRITEDBL gv_CurParamNum,iflsflag,gs_SysParam(gv_CurParamNum)
?"下载成功"
ENDSUB
3.读取配置文件
GLOBAL SUB LoadCurParam()
LOCAL iflsflag,lv_i,addnum
FOR lv_i=0 TO 49
iflsflag=0
FLASH_READDBL lv_i,iflsflag
IF iflsflag=70214733 THEN
FLASH_READ2DBL lv_i,1,gs_SysParam(lv_i)
addnum=addnum+1
ENDIF
NEXT
?"上传完成,上传配置文件数:"addnum
ENDSUB
4.删除配置文件
GLOBAL SUB DeleCurParam()
LOCAL lv_i
FOR lv_i=0 to gv_SysMaxAxis-1
'初始化轴参数变量
gs_SysParam(gv_CurParamNum).SysAxis(lv_i).No=lv_i
gs_SysParam(gv_CurParamNum).SysAxis(lv_i).AxisAtype=0 '轴类型
gs_SysParam(gv_CurParamNum).SysAxis(lv_i).OnePulses=8388608 '轴电机一圈脉冲数
gs_SysParam(gv_CurParamNum).SysAxis(lv_i).AxisPitch=20 '轴螺距
gs_SysParam(gv_CurParamNum).SysAxis(lv_i).AxisSpeed=100 '轴的运动速度
gs_SysParam(gv_CurParamNum).SysAxis(lv_i).AxisAccel=1000 '轴的加速度
gs_SysParam(gv_CurParamNum).SysAxis(lv_i).AxisDecel=1000 '轴的减速度
gs_SysParam(gv_CurParamNum).SysAxis(lv_i).AxisSramp=0 '轴的S曲线时间
gs_SysParam(gv_CurParamNum).SysAxis(lv_i).AxisLspeed=0 '轴的起始速度
'初始化回零参数变量
gs_SysParam(gv_CurParamNum).SysAxis(lv_i).DatumMode=104 '轴的回零模式
gs_SysParam(gv_CurParamNum).SysAxis(lv_i).BackZeroSpeed=50 '轴的回零速度
gs_SysParam(gv_CurParamNum).SysAxis(lv_i).AxisCreep=2 '轴的回零第2段速度
gs_SysParam(gv_CurParamNum).SysAxis(lv_i).DatumIn=-1 '轴的回零信号
gs_SysParam(gv_CurParamNum).SysAxis(lv_i).FwdIn=-1 '轴的正向硬限位信号
gs_SysParam(gv_CurParamNum).SysAxis(lv_i).RevIn=-1 '轴的负向硬限位信号
gs_SysParam(gv_CurParamNum).SysAxis(lv_i).FsLimit=1000 '轴正限位
gs_SysParam(gv_CurParamNum).SysAxis(lv_i).RsLimit=-1000 '轴负限位
'初始化参数文件
gs_SysParam(gv_CurParamNum).FileName="NONE" '初始化参数文件名
NEXT
LOCAL iflsflag
iflsflag=0
FLASH_WRITEDBL gv_CurParamNum,iflsflag,gs_SysParam(gv_CurParamNum)
?"删除成功"
ENDSUB
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。