无刷直流马达控制电路
无刷直流电机(BLDC)是一种高效、高可靠性、低噪声和低维护成本的电机,由于其优异的性能,在许多应用中得到了广泛的应用,例如家用电器、工业自动化、电动车等。控制BLDC电机需要一个专门的控制电路,以下是常用的几种BLDC电机控制电路:
三相桥式电机驱动器:这是一种常用的BLDC电机控制电路,它使用三相桥式电路来控制BLDC电机的相位和电流。三相桥式电路由六个功率晶体管组成,通过控制不同的晶体管通断,可以使电机转动并控制其速度和方向。
三相反电动势(EMF)控制器:这种控制电路使用电机本身的三相EMF来控制电机转速和方向。它包括一个由三个电容器和三个绕组组成的桥式电路,通过改变电容器的充放电状态来控制电机的相位和电流。
磁传感器控制器:这种控制电路使用磁传感器来检测电机的位置,并根据检测结果控制电机的相位和电流。磁传感器通常采用霍尔效应传感器或磁性编码器,可以准确地检测电机的转子位置和速度,并实现高精度的控制。
无传感器控制器:这种控制电路不需要磁传感器来检测电机的位置,而是通过测量电机的EMF信号来确定转子位置和速度,并控制电机的相位和电流。无传感器控制器具有简单、高效、低成本等优点,已经广泛应用于许多领域。
电子换向控制器:这种控制器使用半导体器件来控制电机的相位和电流,电机的换向过程通过控制不同的半导体开关来实现。电子换向控制器通常具有高速、高效、低噪声等特点,适用于高速、高精度控制的应用。
磁致伸缩换向控制器:这种控制器利用磁致伸缩效应来实现电机的换向,通过改变磁场的方向来控制电机的相位和电流。磁致伸缩换向控制器具有高速、高效、低成本等优点,适用于一些特殊应用场合。
无论采用何种控制电路,控制BLDC电机都需要一定的控制算法和软件支持。常用的控制算法包括三角函数PWM(Pulse Width Modulation)控制、反馈控制、PID(Proportional Integral Derivative)控制等。此外,还需要一些硬件设备支持,例如控制器芯片、功率晶体管、磁传感器、编码器等。
总之,无刷直流电机控制电路可以根据不同的控制需求和技术要求选择不同的控制器和算法,以实现高效、精确、可靠的电机控制。
以上是一些常用的BLDC电机控制电路,不同的电路具有不同的特点和适用范围,可以根据具体的应用需求和技术要求来选择和使用。
无刷马达驱动电路分享
1、三相六臂全桥驱动电路
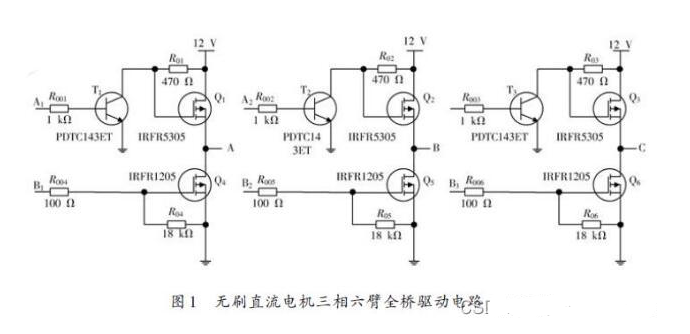
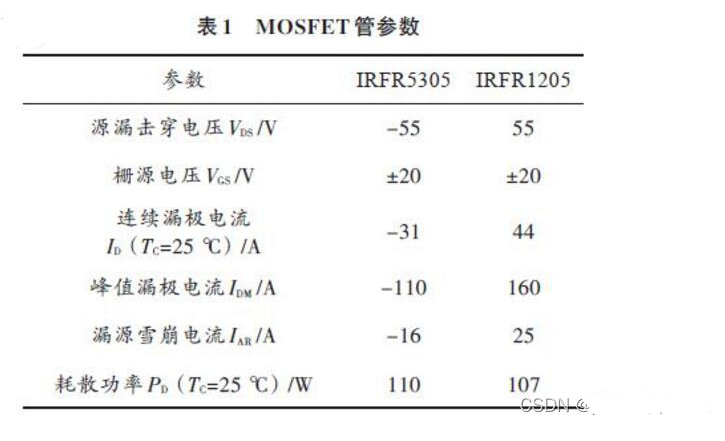
无刷直流电机驱动控制电路如图1 所示。该电路采用三相六臂全桥驱动方式,采用此方式可以减少电流波动和转矩脉动,使得电机输出较大的转矩。在电机驱动部分使用6个功率场效应管控制输出电压,四轴飞行器中的直流无刷电机驱动电路电源电压为12 V.驱动电路中,Q1~Q3采用IR公司的IRFR5305(P沟道),Q4~Q6为IRFR1205(N 沟道)。该场效应管内藏续流二极管,为场效应管关断时提供电流通路,以避免管子的反向击穿,其典型特性参数见表1.T1~T3 采用PDTC143ET 为场效应管提供驱动信号。
无刷直流电机驱动控制采用三相六状态控制策略,功率管具有六种触发状态,每次只有两个管子导通,每60°电角度换向一次,若某一时刻AB 相导通时,C 相截至,无电流输出。单片机根据检测到的电机转子位置,利用MOSFET的开关特性,实现电机的通电控制,例如,当Q1、Q5 打开时,AB 相导通,此时电流流向为电源正极→Q1→绕组A→绕组B→Q5→电源负极。类似的,当MOSFET 打开顺序分别为Q1Q5,Q1Q6,Q2Q6,Q2Q4,Q3Q4,Q3Q5时,只要在合适的时机进行准确换向,就可实现无刷直流电机的连续运转。
2、三相全桥驱动电路
下图为无刷电机的三相全桥驱动电路,使用六个N沟道的MOSFET管(Q1~Q6)做功率输出元件,工作时输出电流可达数十安。为便于描述,该电路有以下默认约定:Q1/Q2/Q3称做驱动桥的“上臂”,Q4/Q5/Q6称做“下臂”。
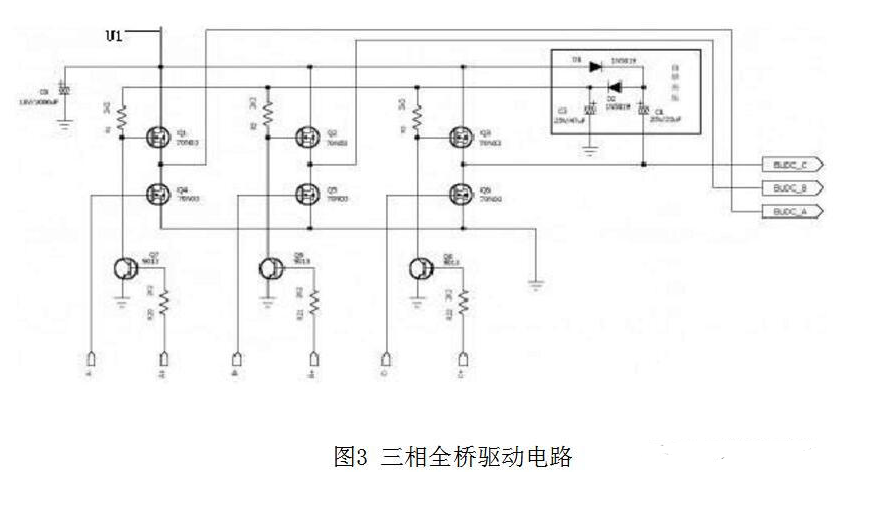
图中R1/R2/R3为Q1/Q2/Q3的上拉电阻,连接到二极管和电容组成的倍压整流电路(原理请自行分析),为上臂驱动管提供两倍于电源电压(2×11V)的上拉电平,使上臂MOSFET在工作时有足够高的VGS压差,降低MOSFET大电流输出时的导通内阻,详细数据可参考MOS管DataSheet。
上臂MOS管的G极分别由Q7/Q8/Q9驱动,在工作时只起到导通换相的作用。下臂MOS由MCU的PWM输出口直接驱动,注意所选用的MCU管脚要有推挽输出特性。
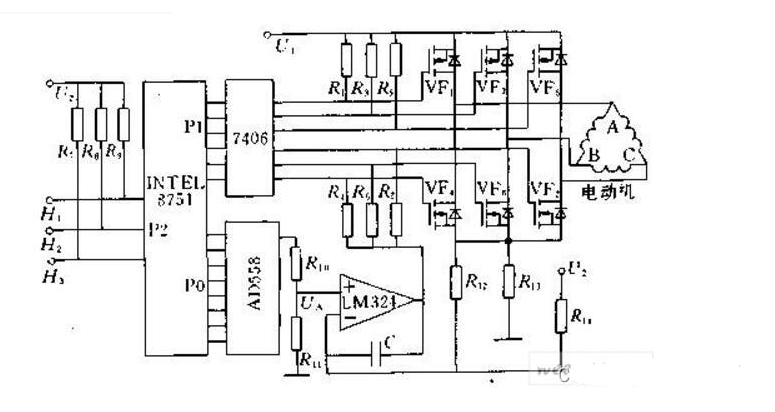
3、单片机控制直流无刷电动机驱动及接口电路图
图1示出采用8751单片机来控制直流无刷电动机的原理框图。8751的P1口同7406反相器联结控制直流无刷电动机的换相,P2口用于测量来自于位置传感器的信号H1、H2、H3,P0口外接一个数模转换器。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。