基于FlexTest 加载控制系统的外接式位移传感器实时控制加载技术
通过模拟试验的验证,能够满足结构静力试验的要求,并在结构静力试验中成功运用,为以后类似的试验提供参考及借鉴。
0 引言
在飞机结构静力试验中为满足对试验件加载的要求,尤其是对某些特殊考核部位和对运动过程中试件的加载,单纯的用力控或者位控作动筒达不到加载要求,提出基于FlexTest 加载控制系统的外接式位移传感器实时控制加载技术,即将外接位移传感器的输出信号接入到控制系统,参与试验控制加载,达到对考核部位的控制加载要求。以下分两个不同的具体的试验情况来阐述该控制加载技术。
1 外接式位移传感器差动实时控制加载技术
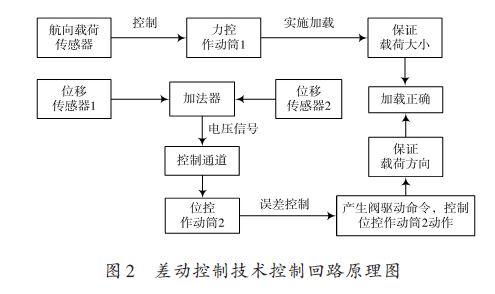
大型飞机结构静力试验中,飞机机翼需要同时施加垂向载荷、航向载荷。这两个载荷在各自的加载方向上必然产生变形,由于大型飞机的机翼是细长的梁式结构,垂向载荷产生的变形远远大于航向载荷产生的变形,因此在加载时会影响航向载荷施加的准确性。为了保证试验实施加载的准确性,提出机翼航向点载荷随动加载方法,即外接式位移传感器差动实时控制技术。运用1个力控作动筒和1个位控作动筒,以及两个不同的控制回路对航向加载点进行随动加载,满足该加载点的加载载荷及加载方向的加载要求。首先进行了模拟验证试验,力控作动筒1及其配置的载荷传感器构成的控制回路确保机翼航向载荷大小的施加;位控作动筒2通过安装在机翼航向加载点固定的位移传感器1和安装在两个力控作动筒连接处的位移传感器2构成的控制回路确保航向载荷的加载方向。试验过程中由于其他垂向加载点的加载而使机翼垂向产生变形,此时位移传感器1和位移传感器2就会产生不同的位移输出,将两个位移传感器的输出信号接入到加法器运算,运算后输出电压信号给控制通道,根据命令和反馈的误差控制位控作动筒2动作。这样就实现了机翼航向载荷基于机翼垂向变形的随动加载,保证了机翼航向载荷的方向的随动。
如下图所示,图1为模拟验证试验安装,图2为该控制回路原理图。

该种外接式位移传感器差动实时控制加载技术成功解决了飞机结构静力试验中载荷施加方向随动的问题,确保了机翼产生垂向变形情况下机翼航向载荷的准确施加,并应用于某型号结构静力中机翼航向点的加载。
2 外接式位移传感器随动实时控制技术
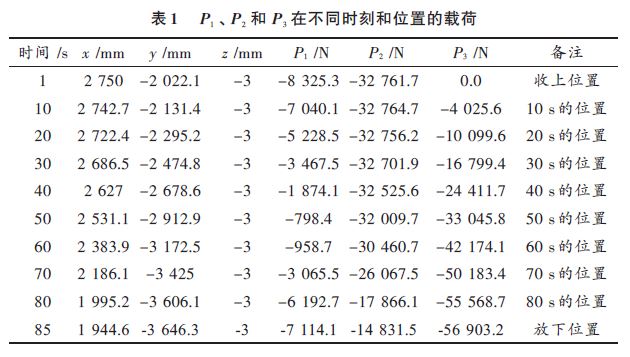
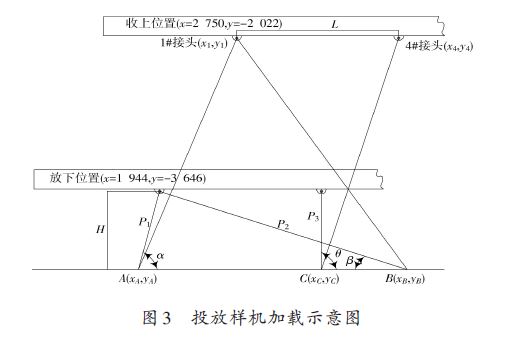
某型号飞机挂飞投放系统可靠性试验中,挂飞投放系统在一定的飞行高度和速度下,挂飞投放机构按一定次序收放,即挂飞投放样机按一定的轨迹运动。投放机构的收放动作由设计方通过其控制操作面板控制,对投放样机载荷的施加由试验方控制,要求试验加载控制与投放系统运动保持同步。图3为该投放样机的加载示意图,加载点在不同位置的载荷根据试验任务书计算得出。
样机在运动过程中不同时刻和位置的受载情况见表1.
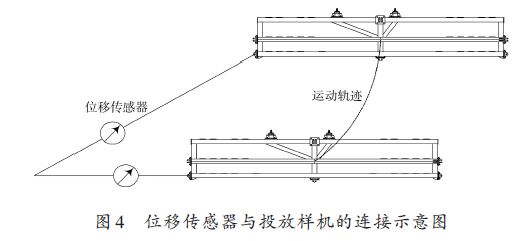
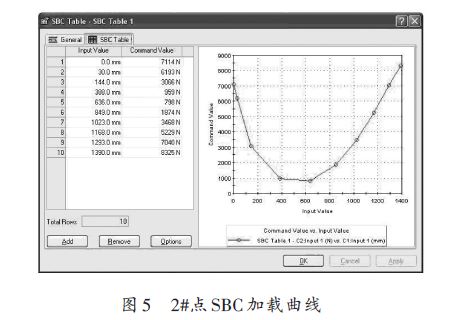
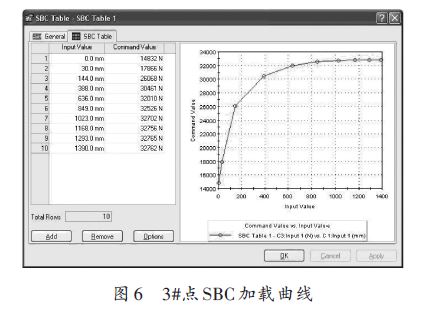
运用以往的固定式加载方法就不能准确地反映样机在投放过程中的受载情况,所以提出外接式位移传感器随动实时控制技术,用以准确反映样机在投放过程中不同时刻和位置所受不同载荷的随动加载技术。在投放样机的底部一侧接入位移传感器,利用位移传感器来实现两个相对独立控制系统的连接,用位移传感器的输出反映投放样机的运动位置;同时把位移传感器的输出信号引入控制系统作为位移反馈信号,通过控制系统根据位移传感器的实时反馈自动查表的形式对投放样机进行随动加载。图4为位移传感器与投放样机的连接及其运动轨迹的示意图,图5为投放样机2#加载点的SBC(Single Based Command)加载曲线,图6为投放样机3#加载点的SBC加载曲线。
该种外接式位移传感器实时控制加载技术,将两套独立的控制系统连接起来,解决了对运动中试验件随动加载的问题。
3 结语
外接式位移传感器实时控制加载技术可以解决对机翼等变形部位的航向加载点的加载,对运动过程中机构的加载等问题。另外,对于FlexTest控制系统需要完成以下几个方面的工作:
(1)位移传感器与控制系统之间的信号转换路径必须重新设计、改造;输入信号需要通过运算放大器运算后接入;同时还需要在控制系统的激励输出端接上合适的负载,有效保正控制通道的桥压不失效,确保控制系统处于正常运行状态;(2)转换电路中负载的大小对整个控制回路的影响可以通过调整控制系统的增益放大系数来解决;(3)所用位移传感器都需要进行标定,控制系统中其他控制参数需要以实标的方式确定,以满足加载要求和加载控制精度。
(4)试验中控制通道配置,事件动作设置,以及载荷谱设置同正常的结构静力试验的配置。
通过本次地面验证试验,验证了位控-力控模式转换的实现方式,通过现场观察以及试验数据分析,可以看出模式转换过程迅速,状态平稳,冲击小。符合试验的要求,所得到的试验数据满足结构静力试验中的要求,并在结构静力试验中成功运用,为以后类似的试验提供参考及借鉴。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。