感知功能模块负责检测、分类和跟踪自主车辆附近的实体和事件。来自车载传感器的数据可与其他来源的信息相结合,如高清地图、V2X或互联服务,以完成此任务。感知模块负责建立和更新车辆感知范围内环境的虚拟表示。
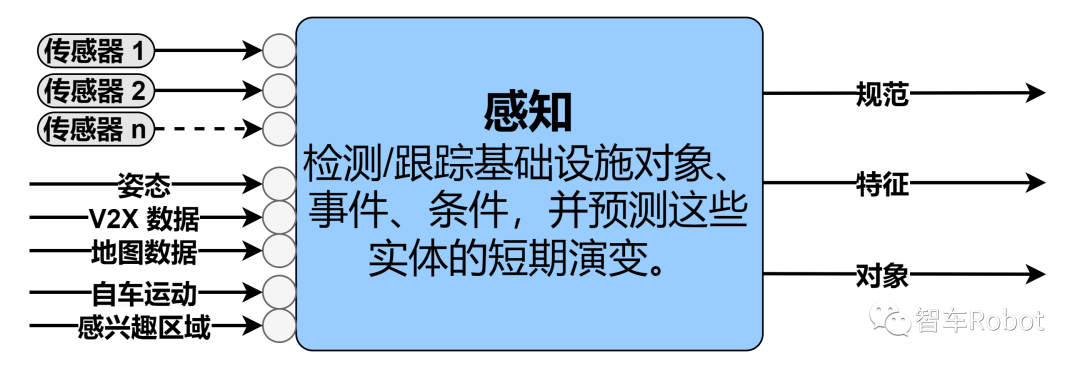
感知功能模块图感知模块可能包括以下算法:•检测基础设施元素,如可行驶路面、路标、交通灯、路缘、交通锥、施工、栏杆等,以及这些元素的动态属性(例如,收费站栏杆下降,红灯等)。
•检测、分类和跟踪动态实体,如车辆、行人和障碍物。
•检测环境条件,如可能存在的天气、火灾/烟雾、湿滑路面。
•识别/分类更复杂的方面,如人的姿态、不稳定驾驶、危险载荷等也可能是感知模块的一部分。感知模块以规范格式接收环境传感器数据作为输入。这些数据可能来自一个或多个传感器,这些传感器可以基于相似或不同的传感技术(例如,摄像头、雷达、激光雷达、超声波),并且可能有重叠的视野。如果同一物理实体被多个传感器“看到”,则可以采用多传感器融合算法来产生这些实体的统一视图。可以采用跟踪实体的时间变化的算法来维护这些实体的存在概率,并预测它们的路径/状态的短期预测。几乎所有检测都需要映射到一个公共的世界坐标系统。
感知输入:
•环境传感器数据:以规范形式(根据传感器技术的不同而不同)接收来自环境传感器的数据,该数据经过处理和/或分析,以使下游功能模块更易于消费和处理数据,或从自主车辆的感知范围内提取有关环境和/或实体的可操作信息。
•姿态:可以用于预选感知视野的某些部分进行特征/对象检测(无论是否使用高清地图)。
•地图数据:可以通过将先验假设的基础设施与来自传感器的观测进行比较,使检测更加可靠。
•自车运动:可以用于调整传感器的读数,以补偿自主车辆的运动。
•感兴趣区域(ROI):可以用于配置传感器或算法,将注意力(分辨率/处理)集中在感知范围的特定区域。例如,这可以帮助分辨率不均匀的传感器进行配置,以便具有特定兴趣的道路/基础设施以更高分辨率“看到”。类似地,可以提取高分辨率图像的某些部分以全分辨率处理,以确定交通灯的状态。
•V2X:提供了一个额外的信息来源,可以利用它使检测更可靠(消除歧义)。
感知输出:
•规范:可以以与原始输入数据相同的形式输出数据,同时进行了一些额外的处理或转换。传感器数据可能在不改变数据格式的基础上对原始数据进行了修改。规范的一个示例是图像,它可以被修改但仍然是图像(与将像素图像转换为物体列表形成对比)。
•特征:根据实现的不同而不同。它们可以表示为3D世界坐标,也可以不表示;可以跟踪,也可以不跟踪。
•对象:用于填充环境/世界模型。它们描述了自主车辆感知范围内检测到的、对后续处理阶段具有相关性的静态和动态实体。
•感知能力:提供有关感知功能动态能力的信息。这可以简单地用感知范围以及在此范围内检测的估计延迟来表达。该能力本身可以从各种照明/天气/环境条件下的个别传感器的能力推导出来。