怎样使用智能系统策略管理EV辅助电池呢?
一种“智能”系统策略可以确保电动汽车无论处于运行或停泊状态时,其辅助电池都具有足够的能量以满足基本负载需求。
随着车辆的电气化和智能化程度越来越高,辅助系统的能耗也在迅速增加。电压通常为12V的辅助电池是该系统最重要的组成部分,支持着车辆的正常运行。无论车辆是处于行驶还是停泊状态,都应确保辅助电池具有足够的能量,满足基本负载需求。然而,现有的方案普遍更专注于车辆运行时的能源管理。
为了填补这一空白,一种检测低荷电状态(SoC)的智能策略被提了出来。该策略可根据负载优先级临时降低辅助负载,并以最大效率为辅助电池充电,使车辆在辅助电池充电方面做出最智能的决策。
因此,该策略可在维持辅助电池电量的同时,将电池能耗保持在较低水平。由于辅助负载是车辆能耗的重要来源,因此必须对辅助动力装置(APU,Auxiliary Power Unit)进行最优能量管理。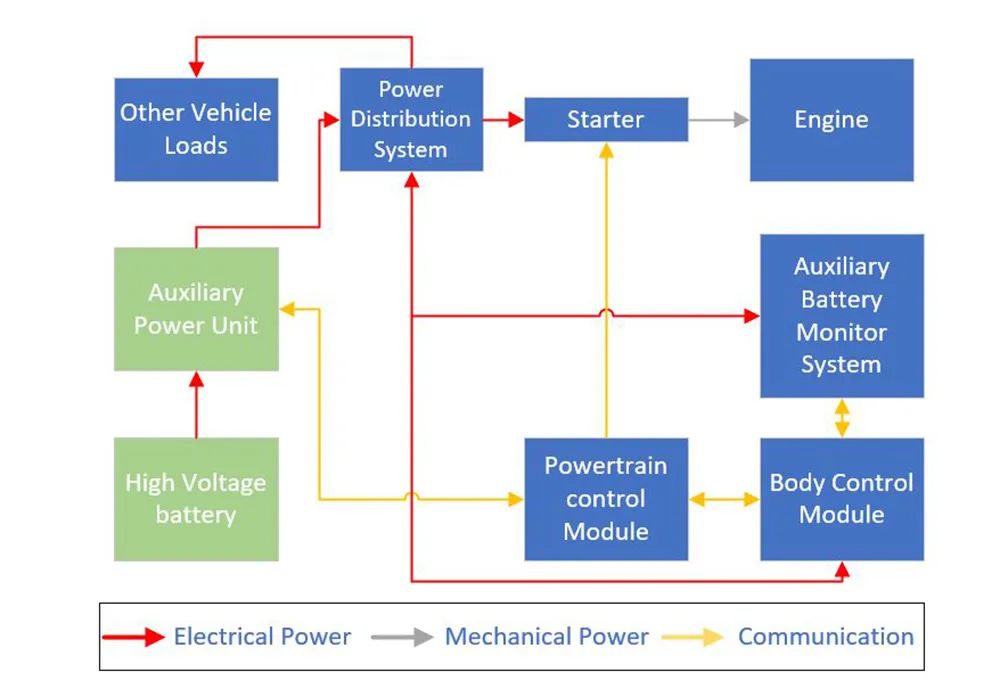
图1,混动汽车中的辅助系统架构。 (福特)
混动汽车的辅助系统架构(图1)可能因使用的混合动力结构而有所不同。当辅助电池管理系统(ABMS)检测到辅助电池的SoC(充电状态,即电量)过低时,就会通过车身控制模块(BCM)把这一信息传递给动力总成系统(PCM)。然后,PCM会命令APU开始将高压(HV)电池的能量输送至辅助电池。
辅助电池负载类别
辅助电池承受多种负载,具体可分为六个类别,分别是车辆连续运行负载(包括车辆启动时的负载)、瞬态负载(特定事件中所需的负载)、OBD测试负载(满足法规要求所需的负载)、车辆安全与性能负载(分别表示与车辆安全和性能相关的负载)和车辆连续熄火负载。车辆连续运行负载与车辆连续熄火负载不同,前者的幅值通常高于后者。
本研究重点关注两种车辆用例:车辆连续运行负载和车辆连续熄火负载。选择这两类负载是因为它们与APU策略的相关性更高。
控制策略的三大关键功能
拟议策略具有三大功能:低电量检测、辅助负载优先级排序和辅助电池充电。
图2,拟议策略的说明。(福特)
图2显示了电源和通信示意图。假设在电池充电情况下,ABMS检测到辅助电池的SoC降至低阈值以下,接着BCM会将该信息从ABMS传递给PCM。然后PCM根据负载优先级关闭负载,并命令APU开始将高压电池的能量传输至辅助电池。
图3,拟议策略的流程图。(福特)
图3显示的是拟议策略的流程图。必须指出的是,虚线框中的停车时间仅适用于车辆熄火场景。SoC的下限用于确定辅助电池的SoC是否会低于该阈值。如果发生这种情况,下一步行动是根据负载优先级来确定是否可以关闭某个用电负载。
该流程完成之后,启动APU为辅助电池重新充电。根据SoC,某些负载也可基于负载优先级重新开启。当辅助电池的SoC达到高阈值时,APU停止向辅助电池充电。
车辆运行场景中的低SoC状态检测是在车辆启动时开始的。PCM继续接收来自ABMS的CAN信号,如辅助电池SoC和电压。当辅助负载从辅助电池中获取电力时,SoC会逐渐减少。一旦SoC降至低阈值以下(如10%),则确定为低电量状态。否则,PCM将继续监测这些CAN信号。
六类辅助负载
表1显示了六类辅助负载的定义。前五类适用于车辆运行场景,其优先级顺序从高到低依次为:1. 车辆连续运行负载;2. 车辆安全操作负载;3. OBD测试负载;4. 瞬态负载;5. 车辆性能负载。 车辆连续运行负载的优先级最高,因为它们为车辆的任何高级功能提供了基本功能支持。其次是车辆安全操作负载。OBD测试负载(满足法规要求所需的负载)排名第三。然后是瞬态负载(如HVAC负载),其优先级高于车辆性能负载,因为它们提供了基本驾驶体验。车辆性能负载的优先级最低,因为它们是车辆运行时的可选负载。
在理想情况下,所有负载都应得到满足。但是在降低能耗和提升性能之间进行权衡时,可暂时和/或有条件地关闭部分负载。
车辆运行场景下的APU充电策略
图4,APU效率与APU负载超过其最大负载的百分比之间的关系。(福特)
为了解释本文中提出的最佳充电策略,图4显示了APU效率与APU负载占其最大负载的比值之间的关系。我们可以观察到,APU负载为最大负载的50%-60%时,最大效率为92%。因此,应该选择APU的运行区间,使其尽可能在最大效率下运行。
例如,如果负载总和要求APU负载超过60%,则会暂时关闭优先级较低的负载,以便APU在最大效率下为辅助电池充电。如果负载总和低于APU当前提供的负载,则APU也可在最大效率下运行,但是充电时间会相应延长。 一旦辅助电池的SoC达到95%左右,APU将关闭。由于APU在恒压模式下运行,因此SoC高阈值应小于100%。当辅助电池充满电时,APU负载会相应降低。为避免APU在低效率下运行,应在APU负载未出现大幅下降的情况下,选择SoC高阈值。
车辆熄火场景下的低SoC状态检测
在车辆熄火场景中,车辆的长时间停放或某些连续负载故障可能导致出现低SoC状态。此外,如果部分汽车电控单元(ECU)在完成OBD测试后没有进入“休眠”状态,那么也可能出现低SoC状态。ECU是否进入休眠状态可通过其通信状态来确定。
与车辆运行场景中的低SoC检测不同,车辆熄火场景中的低SoC检测是在车辆熄火后开始的。如图3所示,PCM可能会从云端接收到一条有关车辆未来停放天数的信息。如果车主改变计划,那么停放时间可能会随后更新。PCM可根据车辆停放时间和当前SoC状态,来确定辅助电池中是否有足够的剩余电量,以便在车主返回使用车辆时做好准备工作。如果电量不足,那么PCM将继续监测来自ABMS的CAN信号,如辅助电池SoC和电压。
当辅助负载从辅助电池中获取电力时,SoC会随时间的推移而降低。一旦SoC降至低阈值以下(如10%),则确定为低SoC状态。否则,PCM将继续监测这些CAN信号。
车辆熄火场景的辅助负载优先级排序
与车辆运行场景类似,我们也进行了车辆熄火场景下的辅助负载优先级排序。不过这个场景下的辅助负载不到五类,仅有三类:车辆连续熄火负载、OBD测试负载和瞬态负载。
车辆连续熄火负载的优先级最高,但它比车辆连续运行负载要小得多。OBD测试负载(根据法规要求,OBD测试是必须进行的)排名第二。瞬态负载(如HVAC负载)的优先级最低。虽然瞬态负载是实现甚至超过车辆使用寿命目标所必需的,但它们不如其他两类负载那么重要。
车辆熄火场景下的APU充电策略与车辆运行场景相同。不同之处在于负载的幅值。车辆熄火时的负载明显小于车辆运行时的负载。充电策略则还是调整APU的运行区间,以确保其在最大效率下运行。
随着汽车制造商提供的辅助驾驶功能越来越多,辅助电池供应商面临的压力也越来越大,他们必须在提高电池效率的同时,实施更先进的能源管理策略,从而在车辆运行期间保持SoC稳定。因此,我们提出了智能系统策略,以检测低SoC状态,以及根据需要对辅助负载的优先级进行排序,并在汽车运行和熄火场景下,通过APU的高效运行对辅助电池进行有效充电管理。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。