foc电机控制算法的调试经验总结
本文分享foc电机控制算法的调试经验,针对的场景是往一套新的控制板卡上移植一套电机控制软件。
具体调试过程是 发波=>电流反馈=>环路=>角度
将调试过程分解为以下步骤。
确认pwm模块正常
确认svpwm发波正常
确认电流反馈正常
引入电机角度
评估角度精度
下文中对移植调试的步骤分解,并给出每一个调试步骤的软件框图。
1、确认pwm模块正常
1.1、确认母线电压和实际测试值一致。
1.2、三相输出悬空,三相输出寄存器分别给固定占空比,测量各相对的波形,看是否和给定占空比一致。
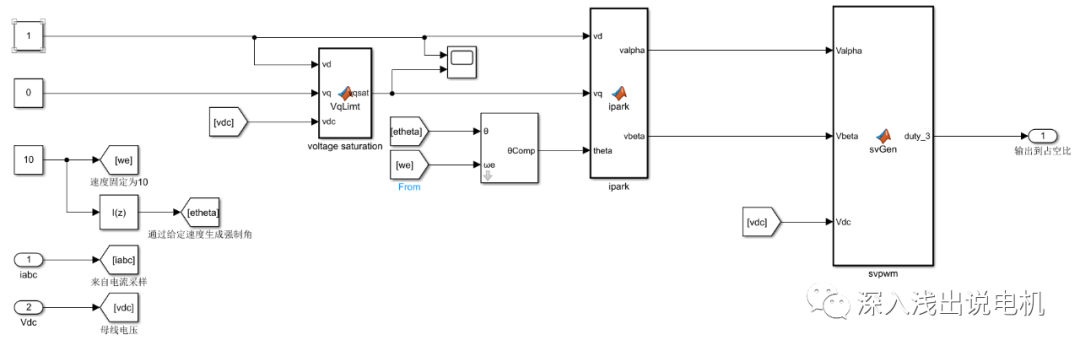
2、确认svpwm发波正常
2.1、连接电机或其他三相对称负载。
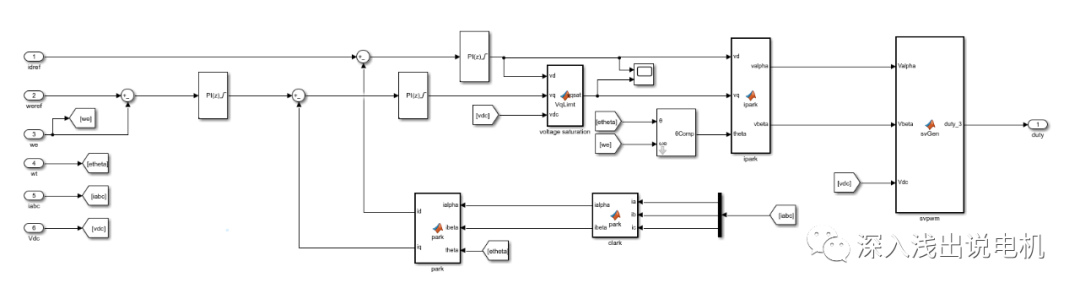
2.2、参考以下框图,选取较低频率,生成固定转速强制角。给电压到 ,对于把电机作为负载的工况,建议强制角频率为10%额定速度或更低, 电压设置为0, 电压从小逐渐增加,看相电流波形,正常情况下电流波形应该为正弦波。另外需要注意的是,电压不能给得过大,在低转速下,电压大部分产生电流,容易烧坏电机或驱动器。
3、确认电流反馈正常
3.1、软件框图如下,设置强制角固定为0度。给 电压,当设置 时,应该有 ; ,其中 为电机相电阻。此处也可以使用采样值和示波器测量值对比。需要注意的是,因为逆变器输出有一定的非线性,在 较小时,实际输出电流和电压的关系可能是非线性的,通过上述方法计算的电流和实际输出电流有误差。
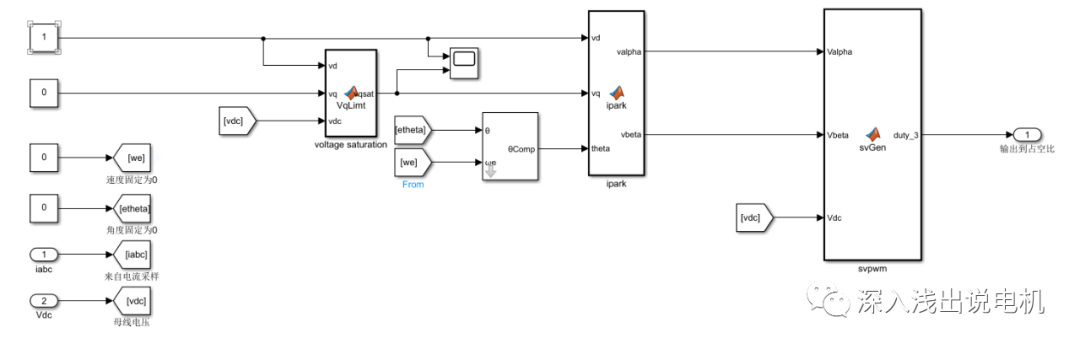
该方法可以校验电流采样是否正常,也可以用来辨识电流采样的方向和 三相采样通道。
修改强制角固定为120度,给 电压,当设置 时,应该有 ;
修改强制角固定为-120度,给 电压,当设置 时,应该有 ;
3.2、参考以下框图,保持固定角度、启用 电流环,令 轴参考电流 约20%额定电流,给 轴电流为0,确认 ,调节电流环参数确保电流上升速度,超调量满足需求。
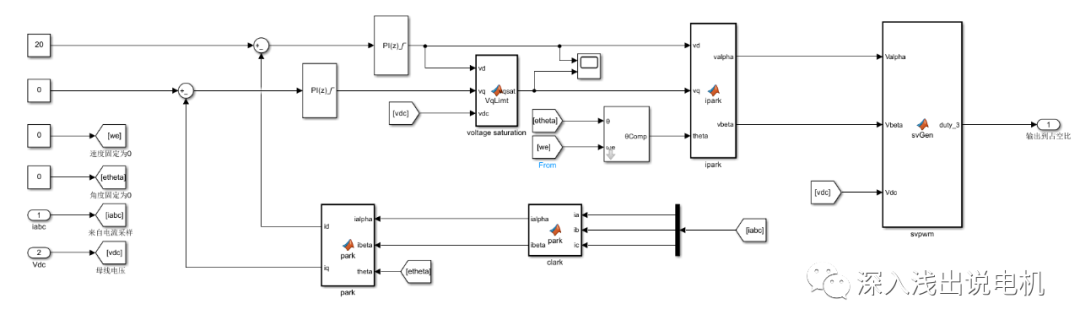
3.3、按照2.2方式给角度、启用 电流环,给 轴参考电流约20%额定电流,给 轴电流为0,确认电机正常旋转,并确认实际输出电流为幅度等于给定电流大小。
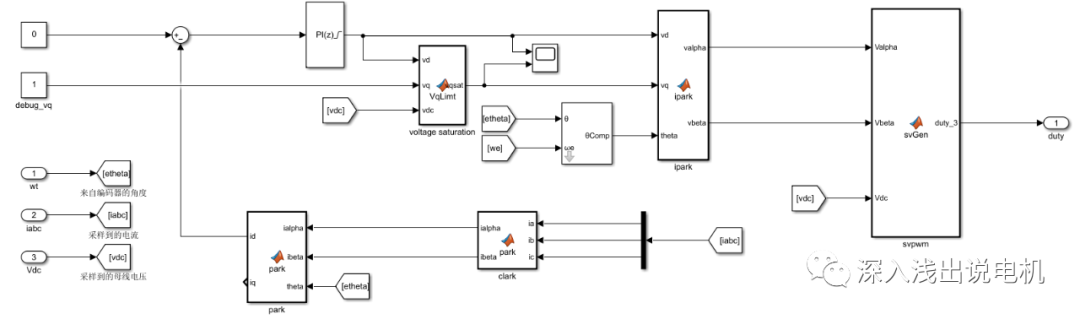
4、引入电机角度
4.1、保持3.3的发波方式,通过无传感器估算算法或编码器获取速度,角度,确认3.3中的强制角和给定速度近似于估算速度角度或编码器获取的速度角度。
4.2、参考以下框图,将估算速度角度或编码器获取的速度角度引入环路,保持 控制,关闭 轴电流环,直接从小到大给 电压,确认电机工作正常。
4.3、连接负载,使能 电流环,加入速度环,调试速度环参数。
到此,就完成了在新驱动器移植速度控制的全部调试流程。
5、评估角度精度
能够把电机三相电路分解为励磁电流和转矩电流建立在准确知道转子位置的前提下,如果转子位置不准,程序中给定的转矩电流不会全部产生转矩,以下分享评估角度精度的方法。
同步电机电压方程建立在角度信息准确的前提下,假设角度准确,电机参数准确, 轴电压电流存在如下关系:
当电机工作在稳态工况时,电压方程可以写为以下形式:
考虑角度误差
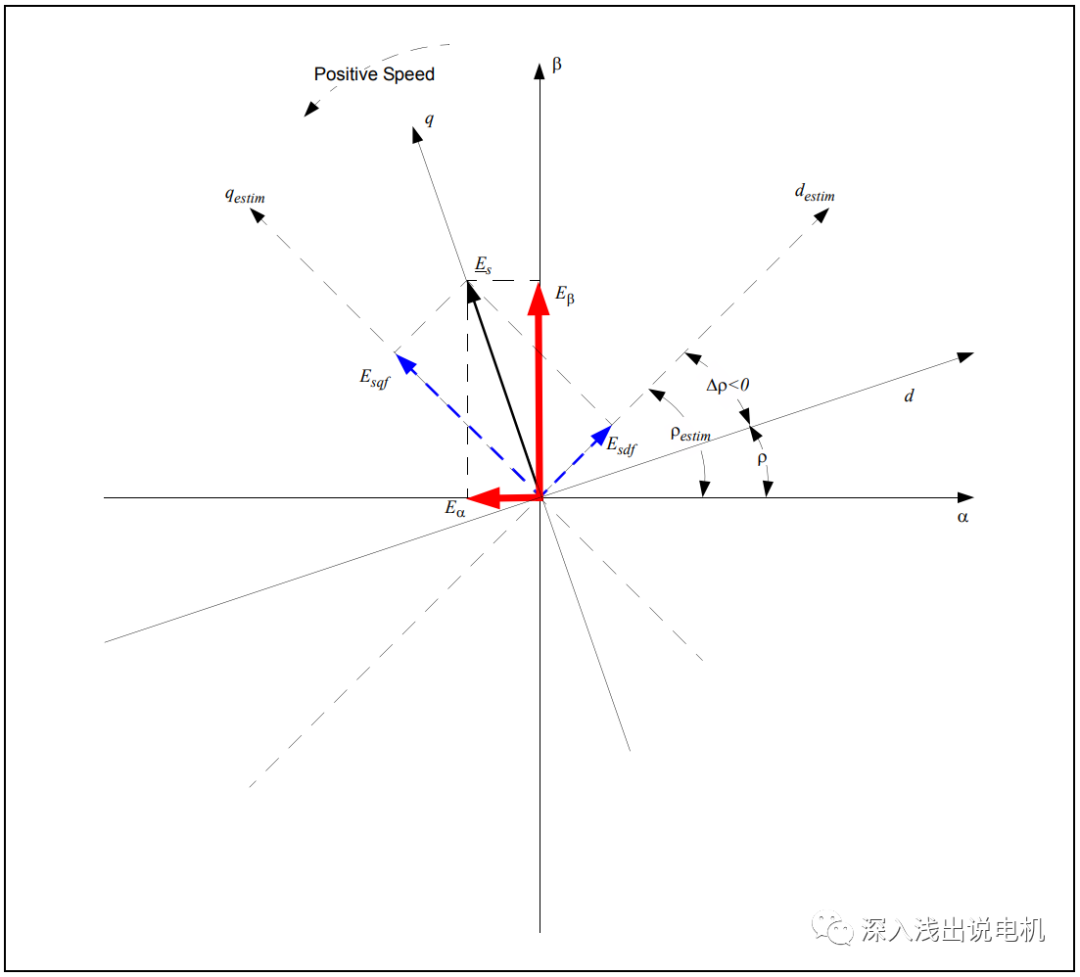
通过电流采样及坐标变换得到 ,将 及电机参数,转速带入电压方程,计算 轴估算电压记作和程序中pi调节得到对比,角度越接近真实角度$ , 和 越接近。
6、小结
本文分享了foc调试经验,先确认驱动是否正常,再确认信号是否正常,最后调试环路。确保对整个系统有较好的把握,对每个环节都能够心中有数。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。