电动汽车悬架动态特性仿真
摘要:由于动力传动系统的改变,电动汽车的悬架动态特性与传统汽车不相同。本文以某电动汽车悬架系统相关参数为参考,在Matlab/Simulink环境中建立了四分之一车主动悬架模糊控制器。以车身垂直加速度、悬架弹簧动挠度以及轮胎动载荷等相关动态特性作为对电动车平顺性和操纵稳定性影响的评价指标。仿真结果表明,具有模糊控制器的半主动悬架对电动车悬架动态特性的改善有良好的效果。
01 引言
目前应用于电动车悬架动态特性控制系统的控制理论比较多,主要有最优控制、预测控制、模糊控制、自适应控制、神经网络控制以及复合控制等 [1] [2] [3] 。模糊控制由于不需要建立被控对象的精确数学模型,且对于非线性对象具有良好的Robust和高控制精度的特点,因而被广泛的运用在改善电动汽车悬架动态特性上 [4] [5] 。刘静构建了一种带“天棚”阻尼的1/2车辆主动悬架系统,推导出基于LQR设计的该系统的动力学方程,为其他控制策略提供理想的参考模型 [6] 。美国加州大学的Abdel-Hady将模糊控制和LQR控制的半主动悬架进行对比发现:前者的车身加速度和悬架动行程较后者分别下降16%和18% [7] 。英国剑桥大学的Ruey-Jing Lian建立了基于自组织模糊控制的半主动悬架,并进行了控制试验,结果表明该控制器有效降低了簧上质量加速度,对于悬架系统的平顺性提升效果显著 [8] 。合肥工业大学的陈杰平在半主动悬架模型基础上,利用八板块方法设计了整车的变论域控制策略。在随机路面激励的条件下,通过仿真和试验研究发现:采用模糊变论域控制的半主动悬架相比于被动悬架的振动强度改善了9%~22% [9] 。
因此本文基于现代模糊控制理论,建立了主动模糊控制模型来验证模糊控制对电动车悬架动态特性控制的有效性和适应性。
02 四分之一悬架模型的建立
弹簧是表示力与位移关系的元件,在力学模型中,它被抽象成为无质量并具有线弹性的元件。阻尼器是表示力与速度关系的元件,在力学模型中,它被抽象成无质量且具有线性阻尼系数的元件。如图1所示,本文采用二自由度1/4半主动悬架模型,利用牛顿第二定律建立如下运动微分方程:
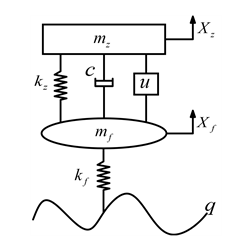
图1 1/4车主动悬架模型

其中:mz为簧载质量,mz = 480 kg;mf为轮胎质量,mf = 40 kg;xz为车身垂向位移,单位米/m;xf为轮胎垂向位移,单位米/m;q为路面激励位移,单位米/m;kz为悬架刚度,取kz = 15000 N/m;kf为轮胎刚度,取kf = 150000 N/m;为悬架阻尼系数,取c = 12000 N/(m/s);u为主动控制力,单位牛顿/N。
为了与路面8级分类标准对应,本文采用基于有理函数的路面不平度时域模型,B级路面标准,仿真速度为20 m/s,其时域数学模型可以用下式描述 [10]

式中,q(t)是车轮所受到的路面随机激励;v是汽车的行驶速度;w(t)是一白噪声。a(1/m)是常系数,不同路面的参数估计值a的值为:B级路面a = 0.1303,C级路面a = 0.12。当车速为20 m/s时,路面不平度激励仿真如图2所示:
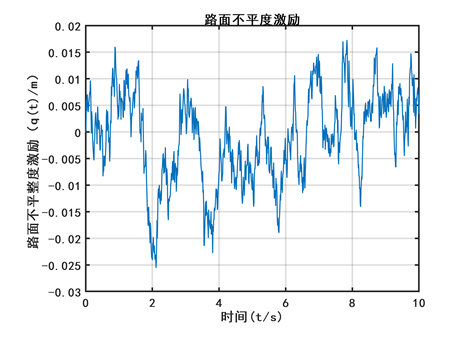
图2 路面不平度激励
03 模糊控制器的设计
模糊控制器设计主要包括选取控制器结构、选择输入和输出变量的论域、制定控制规则及解模糊化策略等。本文选取误差e为车身垂向速度,误差ec为车身垂向速度变化速率即加速度,u为控制悬架系统的控制力。
由被动悬架仿真得到车身垂向速度变化范围为[−0.15, 0.15],车身垂直加速度变化范围为[−1.5, 1.5]。设输入和输出变量模糊集基本论域分别为:

使用速度变化量化因子Ke、加速度变化量化因子Kec与输出控制力变化量化因子Ku来表征模糊集论域精确量模糊化的加权程度,经反复仿真试验得:

其中:n、m分别为误差e、ec的模糊集论域的边界范围;x为悬架系统需要的理论控制力,变化范围为[−500,500]。模糊子集采用7个语言变量值[NB NM NS ZO PS PM PN]描述。建立表1所示的49条模糊控制规则。
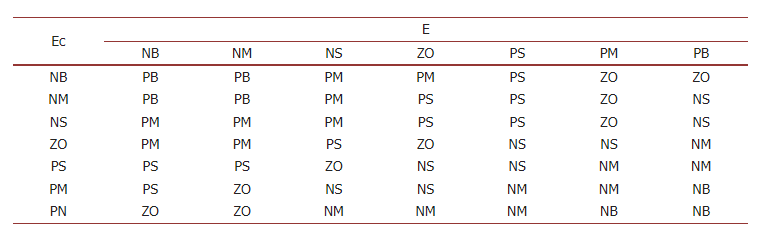
表1 模糊规则控制表
04 仿真分析
按标准ISO/TC 108/SC2N67中将路面不平度分为8级规定,本文采用B级路面,路面不平度系数平均值取64 × 10−6 m2,仿真车速为20 m/s,参考空间频率为0.1 m−1,采样频率为0.01 Hz,仿真时间取10 s。在Simulink中建立1/4车主动悬架仿真模型,如图3所示。车身垂向加速度、悬架动挠度、轮胎动载荷在不施加模糊控制力和施加模糊控制力两种模式下的仿真结果对比如图4~6所示。
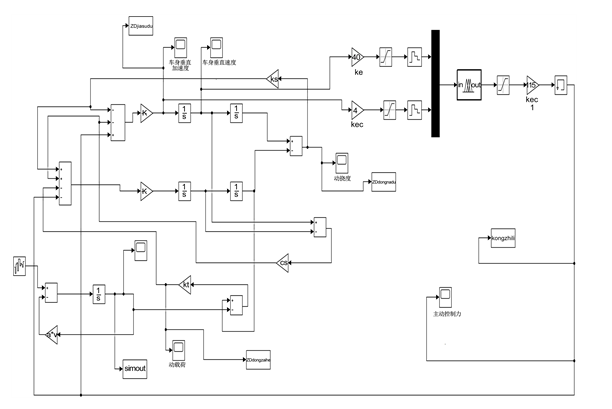
图3 模糊控制Simulink仿真模型
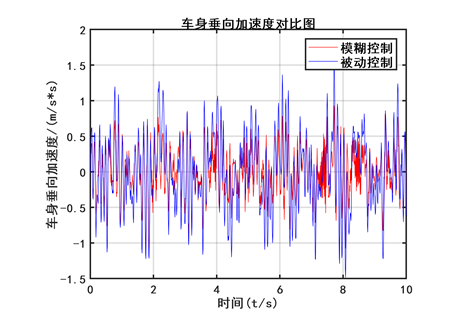
图4 车身垂向加速度
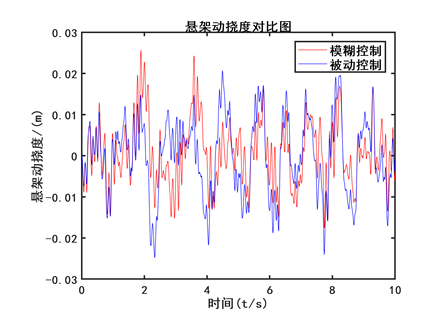
图5 悬架挠度对比
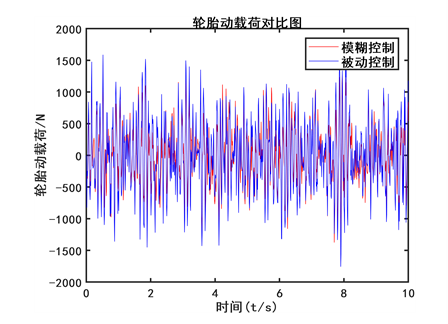
图6 轮胎动载荷对比
依据两种控制策略下车身垂向加速度、悬架动挠度和轮胎动载荷的时域图及其均方根值(如表2所示)可知,采用模糊控制策略有效降低了车身垂向加速度、悬架动挠度、轮胎动挠度的幅值。

表2 平顺性评价指标对比表
05 结论
1) 车辆行驶路面的不平度是随机性的,本文以随机白噪声作为系统的输入,来模拟随机路面,和实际路况相符。
2) 本文采用模糊控制的策略建立了四分之一车辆半主动悬架模型,通过本文提出的模糊控制策略控制主动控制力的实时输出,有效地改善了电动车悬架系统的的平顺性和操纵稳定性。验证了具有模糊控制器的半主动悬架对电动车悬架动态特性的改善有良好的效果。同时,模糊控制系统搭建简便,使得半主动悬架系统的建立具有实际意义。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。