汽车电子产品是指智能网联汽车、车联网和车载信息服务中,具备感知、计算、 反馈、控制、执行、通信、应用等功能,实现信息感知、高速计算、状态监测、 行为决策和整车控制的基础电子产品。汽车电子于 1970 年代引入汽车工业,首 先在发动机燃油喷射控制系统应用,随着电子技术的不断发展和汽车电子创新性 用途的不断开发,汽车电子开始广泛应用于汽车的各个领域。汽车电子种类较多, 按照应用领域划分可以分为汽车电子控制系统(发动机电子、底盘电子、驾驶辅 助系统、车身电子)和车载电子电器(安全舒适系统、娱乐通讯系统等)等。

汽车电子按照技术用途划分可以分为传感器、控制器和执行器三类,近年来,汽 车电子行业呈现出智能化、网联化、集成化等的新发展趋势,促使传感器等关键 部件需求日益增加及数据总线技术关键技术逐渐普及。
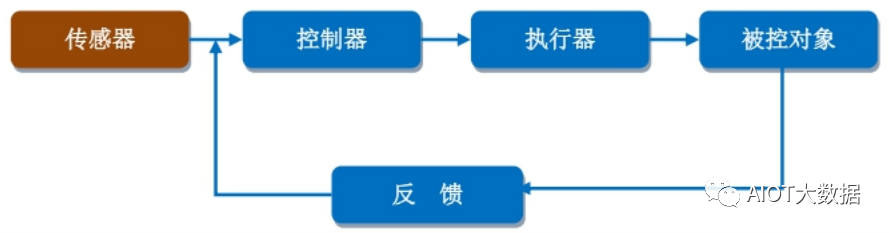
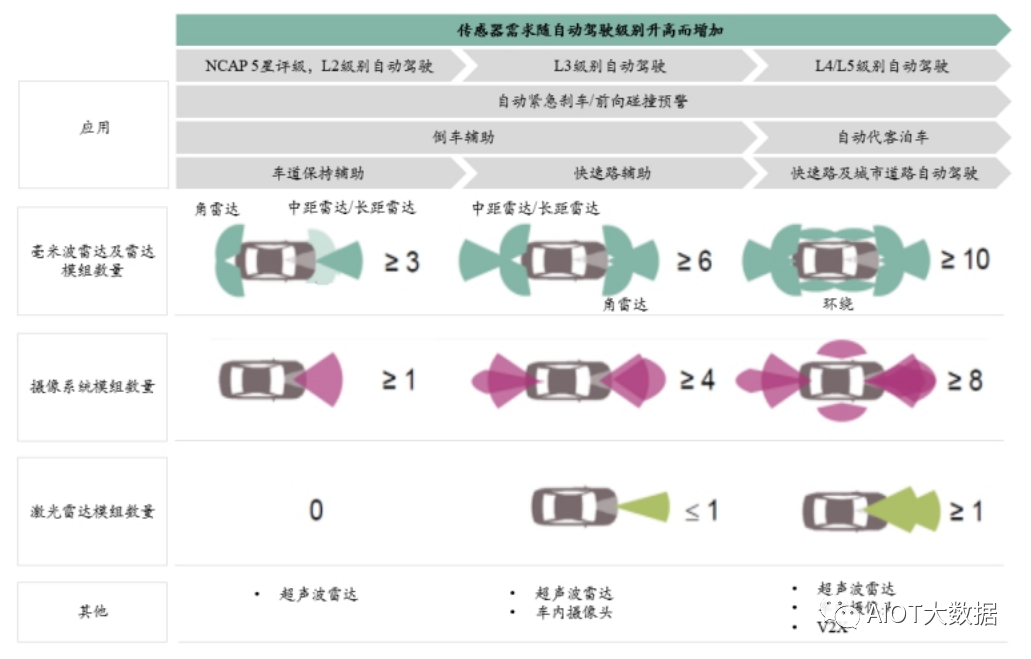
汽车传感器是汽车电子控制系统不可或缺 的一部分,用以测量位置、压力、力矩、温度、角度、距离、加速度、空气流量 等信息,并将这些信息转换成电信号传输到汽车电子控制器。随着汽车电子产品 在汽车应用的普及和多样化发展,汽车传感器产品的销量也实现了快速增长。目 前,普通汽车一般安装数十个传感器,而高级轿车则安装多达上百个传感器。全 球范围内,自动驾驶技术不断向高阶跃进,对于传感器的需求也随之快速攀升。
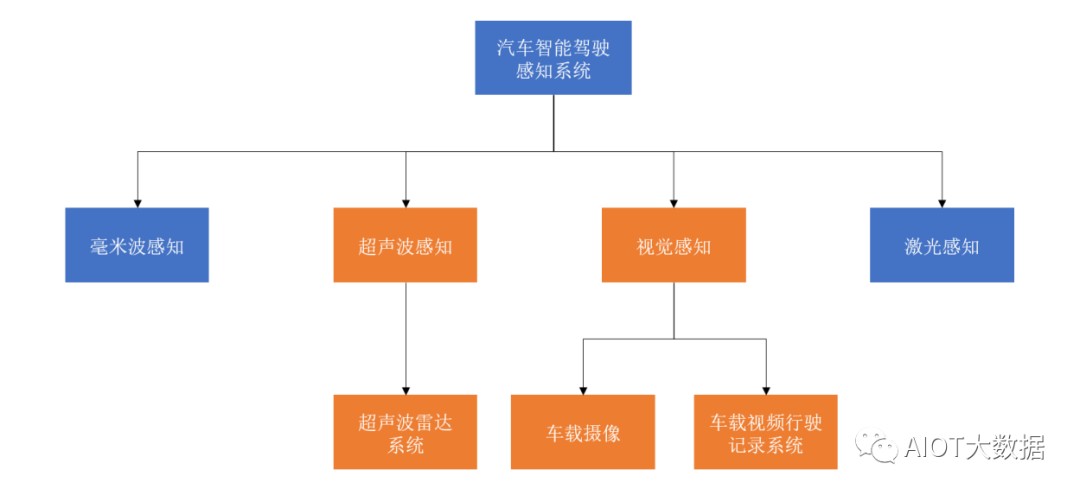
目前,汽车智能驾驶感知系统主要包括视觉感知、超声波感知、毫米波感 知和激光感知。
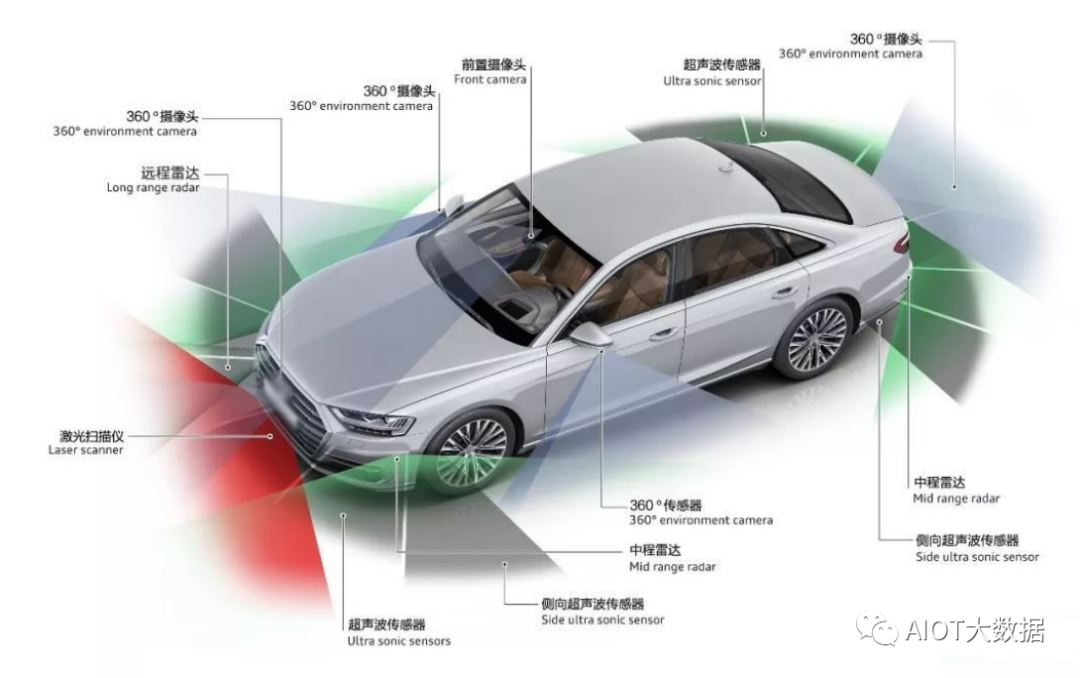
汽车智能驾驶感知系统是汽车的“眼睛”和“耳朵”,负责对汽车所处环境进 行侦测,构成了汽车系统感知层,并为高级辅助驾驶系统的决策层提供准确、 及时、充分的依据,进而由执行层对汽车安全行驶作出准确判断。 汽车智能驾驶感知系统产品在汽车中的具体应用示意图如下:
目前市场上主流的汽车智能驾驶感知系统包括视觉感知、超声波感知、毫 米波感知、激光感知等技术路线。不同汽车智能驾驶感知系统技术路线的优 点、缺点、适用场景和受限场景不同,主要如下:


不同类型汽车智能驾驶感知系统的适用场景、受限场景、优缺点、成本等 不同,彼此之间主要形成互补而非简单替代关系。随着汽车行业整体智能化水 平的提高,汽车智能驾驶感知系统已逐步作为标配而广泛应用于高、中、低档 等各类车型;因为自动驾驶的冗余和容错要求导致越是高阶的自动驾驶需要装 配越多的汽车智能驾驶感知系统,所以随着自动驾驶阶段的提升,单车的汽车 智能驾驶感知系统数量需求预计将同步增加。
车载摄像系统的应用
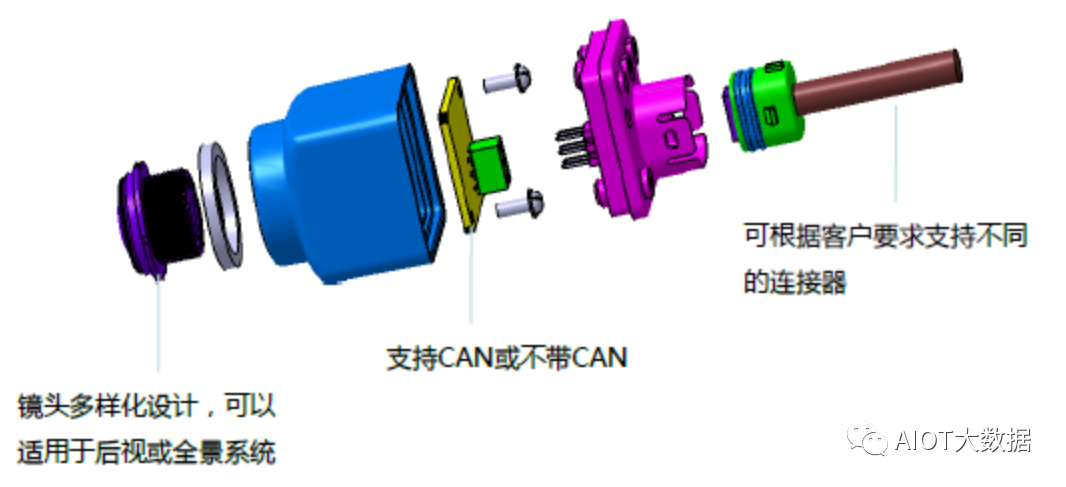
车载摄像系统产品采用高度平台化设计,融合了图像传感、车道偏 离预警、夜视、防水、3D 动态车辅线等多方面的技术,设计简单、灵活、可 靠,可支持 130°或者 195°镜头,支持不同的图像传感器。
主要应用领域具体如下:
A、泊车系统
车载视觉系统产品在泊车系统中的应用可与车载雷达系统产品配合使用 的。泊车系统通过安装在车身上的摄像头以及超声波传感器,探测停车位置, 并形成实时泊车影像,帮助驾驶员扫除视野死角,提高泊车安全性和准确性。
B、全景摄像系统
全景摄像系统,也叫 360 全景系统,是车载视觉安全系统的重要组成部 分,其工作原理是在车身周围安装若干广角摄像头用于采集车身周围画面,通 过图像处理手段将所采的鱼眼图像转变为没有畸变的俯视画面,最后多幅图像拼接为一张车体鸟瞰视图,实时地显示给驾驶员,从而减少由于驾驶员视野盲 区引发的交通事故。

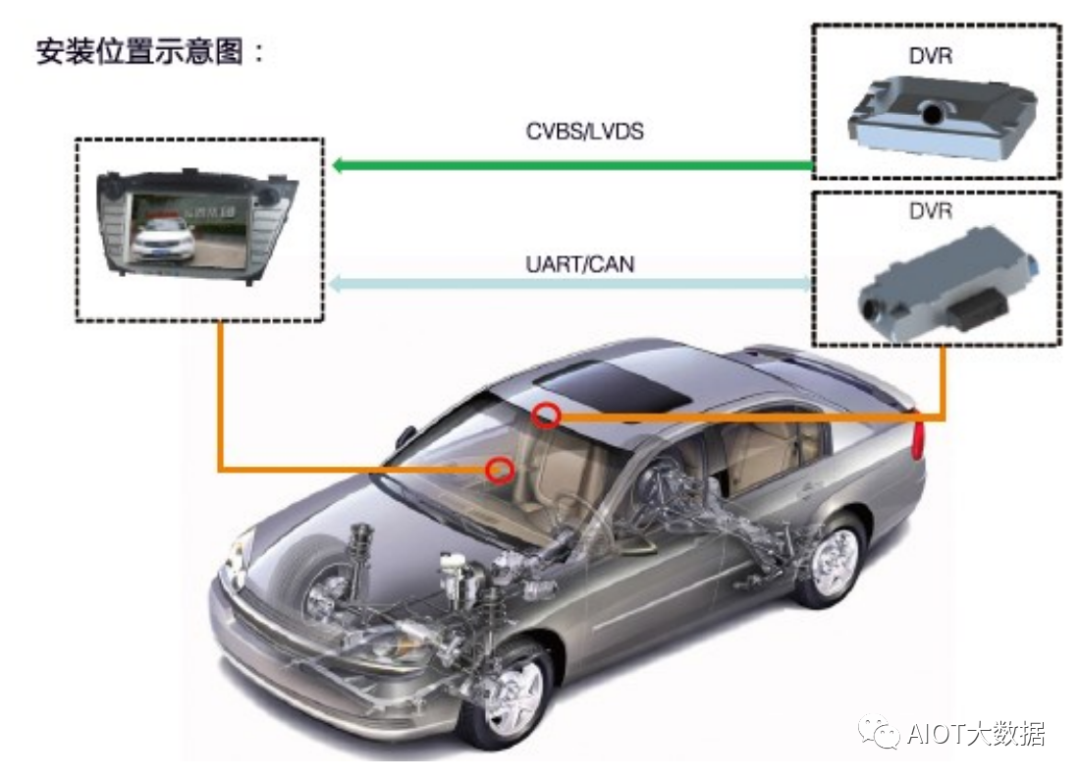
②车载视频行驶记录系统
车载视频行驶记录系统即记录车辆行驶途中的影像及声音等相关资讯的仪 器,车载录像系统的基本组成包括摄像头、主机、重力传感器、数据分析软件 等。车载视频行驶记录系统采用嵌入式处理器和嵌入式操作系统,结合 IT 领域 最新的音视频压缩/解压缩技术、无线通讯技术、USB 通信技术、高级车载电源 管理技术,适用于各类车型进行实时录像和监控。
③超声波雷达系统具体应用
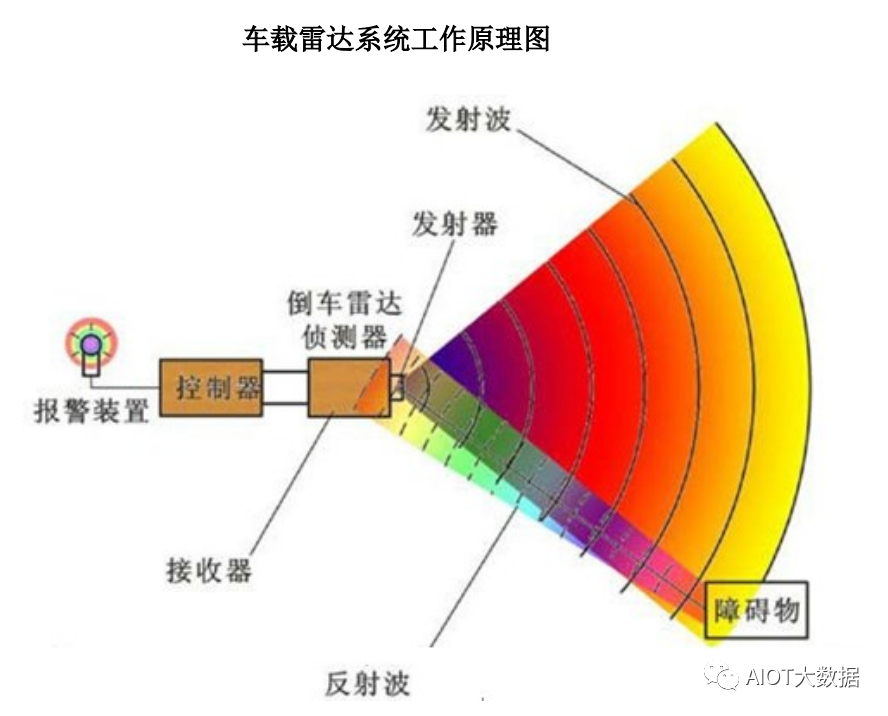
超声波雷达系统,主要由超声波传感器、控制器和显示器或蜂鸣器等部分 组成。超声波雷达系统采用超声波测距原理,驾驶者在倒车或行驶时,启动车 载雷达系统,在控制器的控制下,由装置于车身上的探头发送超声波,遇到障 碍物,产生回波信号,传感器接收到回波信号后经控制器进行数据处理,判断 出障碍物或相邻车辆的位置,由显示器显示距离并发出警示信号提示给驾驶 者,使倒车或行驶更安全。 超声波测距是利用其发射特性来实现,其测距原理是通过超声波发射器发 出超声波信号,再由超声波接收器连续监测超声波发射后遇到障碍物所反射的 回波,由测出的从发射到接收到回波的时间差来计算出障碍物到车体的距离。 车载雷达系统工作原理示意图如下:
超声波雷达系统主要应用于 ADAS 中的泊车系统和盲点侦测系统中,具体 如下:
A、泊车系统
泊车系统按照自动化程度分为普通泊车系统和自动泊车系统。在普通泊车 系统中,超声波雷达系统主要功能是计算车体与障碍物之间的实际距离,并提 示给驾驶者,为驾驶者泊车提供依据。 而在自动泊车系统中,超声波雷达系统的应用更为智能化和集成化。自动 泊车系统可以使汽车以正确的停靠位泊车,该系统包括环境数据采集系统、中 央处理器和车辆策略控制系统,自动泊车系统通过遍布车辆周围的雷达探头测 量车身与周围物体之间的距离和角度,然后通过车载电脑计算出操作流程配合 车速调整方向盘的转动,从而实现自动泊车。

B、盲点侦测系统
盲点侦测系统又叫并线辅助系统,主要功能是扫除后视镜盲区,其基本原 理是在汽车后保险杠安装超声波雷达传感器,在车辆行驶时发出超声波探测信 号,通过超声波雷达探测车辆两侧的后视镜盲区中的超车车辆,对驾驶者进行 提醒,从而避免在变道过程中由于后视镜盲区而发生事故。
车载摄像头和超声波雷达在高级驾驶辅助系统(ADAS)领域的应用
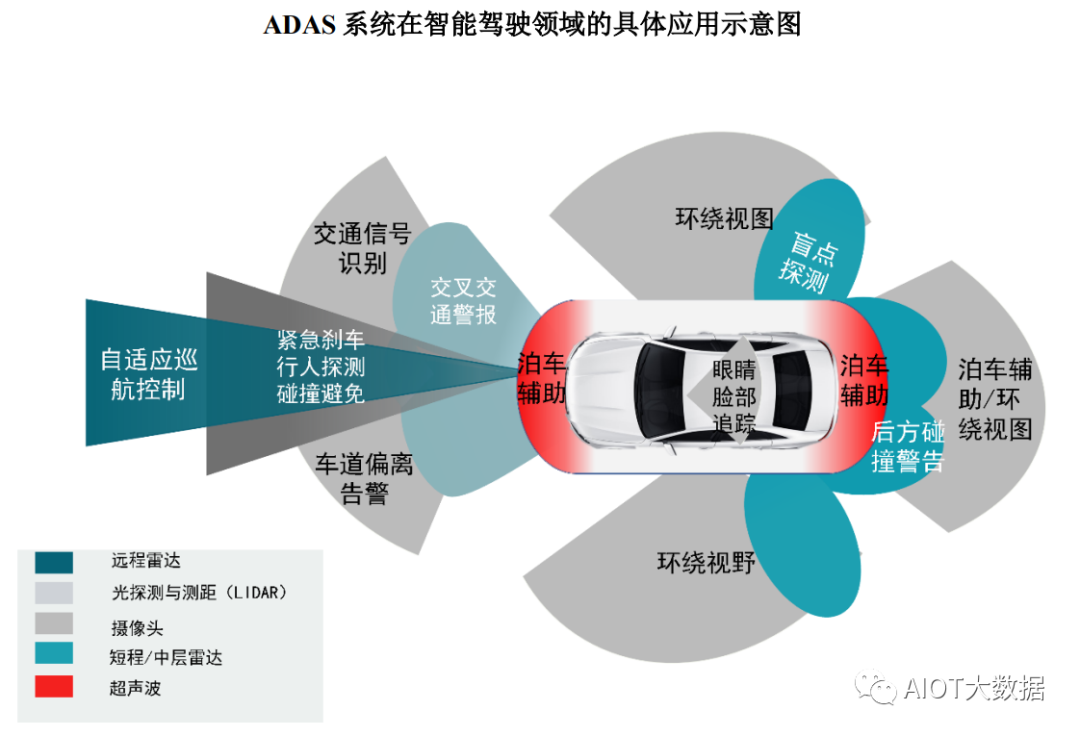
高级驾驶辅助系统(ADAS)是一个主动安全功能集成控制系统,其利用 超声波雷达系统、车载摄像系统、车载信息系统等各类电子部件以及算法等多 种技术,分析汽车所处周遭环境,进行静态、动态物体的识别、跟踪,在碰撞 或其他危险发生前就发出警报,使驾驶者提前觉察可能发生的危险。ADAS 系 统利用 ARM、DSP、EVE 等处理器处理相关数据,再通过执行器改变汽车的行 驶状态,或者将信息反馈给驾驶者改变车辆的行驶状态,从而提升汽车驾驶的 安全性和舒适性。ADAS 系统主要应用于车辆高级辅助驾驶或智能驾驶领域, ADAS 系统在智能驾驶领域应用示意图如下:
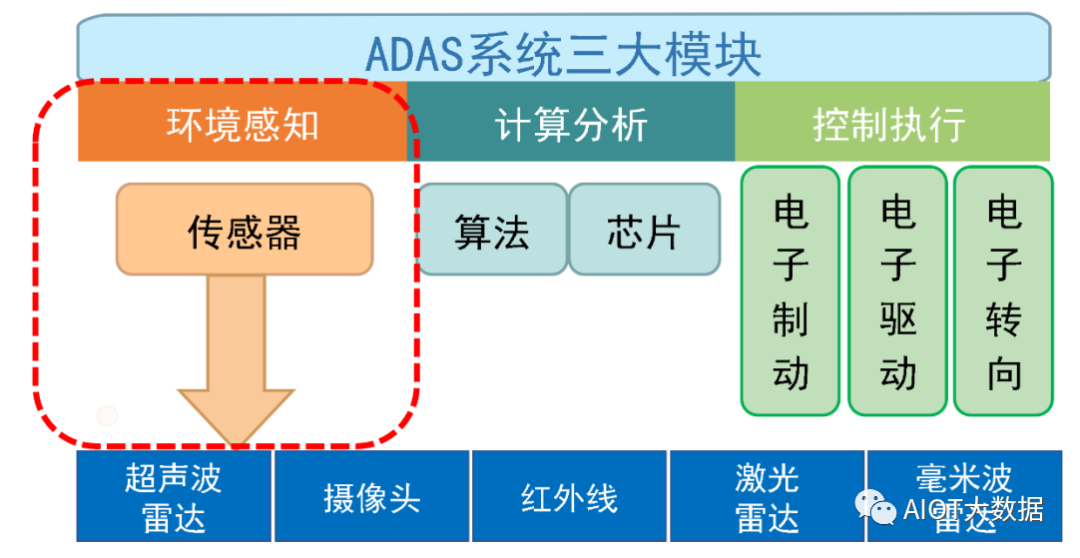
ADAS 系统主要包括感知系统(感知层)、计算分析(决策层)、控制执 行(执行层)三大模块,其中环境感知模块为计算分析模块提供基础数据来 源,计算分析模块的计算分析结果为控制执行模块提供指令依据。
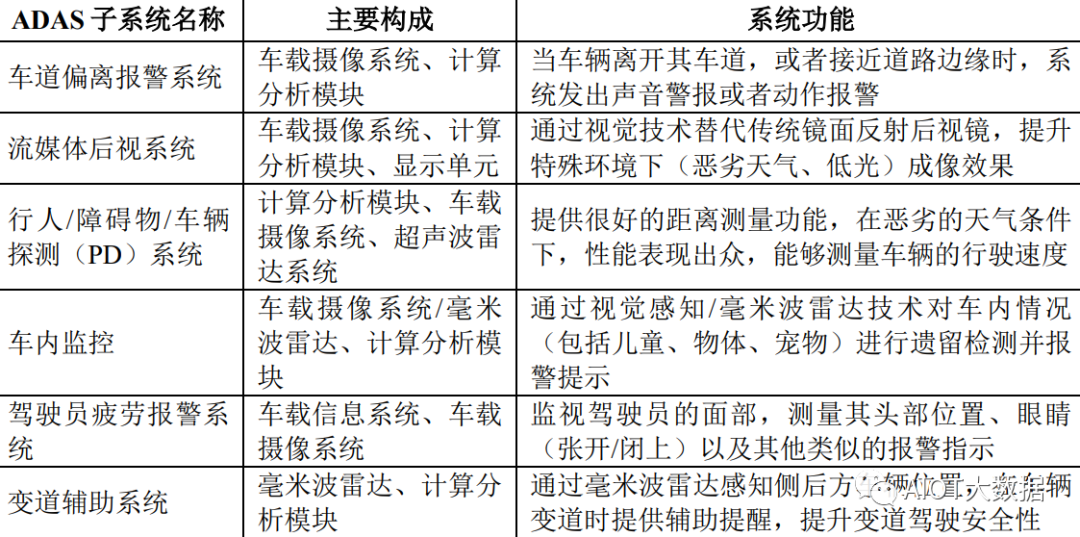
作为 ADAS 环境感知模块的重要组成部分,车载摄像系统、超声波雷达系 统以及毫米波雷达系统等产品在 ADAS 系统的具体应用如下:
车载摄像系统是 ADAS 系统的视觉传感器,可以应用于泊车辅助和行车辅 助等多场景。车载摄像系统主要包括前视摄像头、后视摄像头、全景摄像头、 盲区摄像头、流媒体摄像头、车内监控摄像头、疲劳监测摄像头等,目前智能 驾驶的全套 ADAS 功能需要多个摄像头,包括 1 个或多个前视摄像头、多个环 视摄像头、1 个或多个盲区摄像头、1 个或多个流媒体摄像头、1 个疲劳监测摄像头以及 1 个或多个车内监控摄像头。后视摄像头是 ADAS 系统标配的传感 器,常与超声波雷达配合,主要用于泊车辅助;盲区摄像头通常为 2 个摄像 头;环视摄像头通常为 4 个广角摄像头,主要应用于 360 环视泊车,通过将 4 个摄像头的图像进行拼接后形成一幅完整的全景图像;流媒体摄像头通常为 1 个或者 3 个,用于内外镜面后视镜电子化替代;疲劳监测摄像头通常为 1 个, 用于驾驶员的疲劳状态、注意力集中度、危险驾驶行为等驾驶员状态监控并报 警提示;前视摄像头通常为 1 个或多个,主要是用于 FCW(前碰撞预警系统) 和 TSR(交通标识智能识别)等行车辅助系统,未来随着算法的精进,与毫米 波雷达配合,还可以实现行人/车辆/障碍物侦测系统等 ADAS 系统。
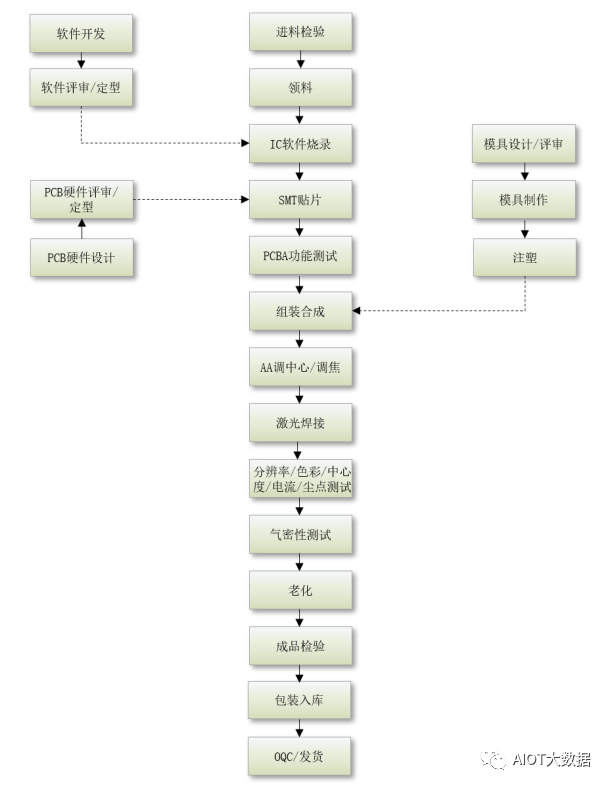
车载摄像系统生产工艺流程图
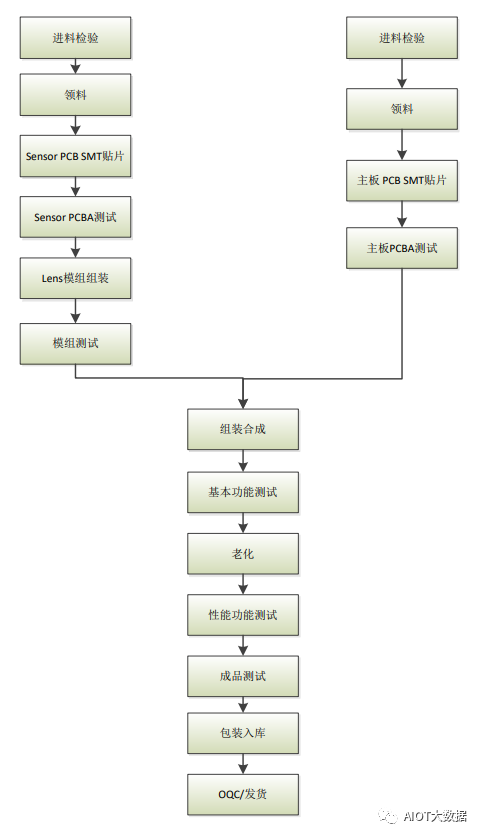
车载视频行驶记录系统生产工艺流程图
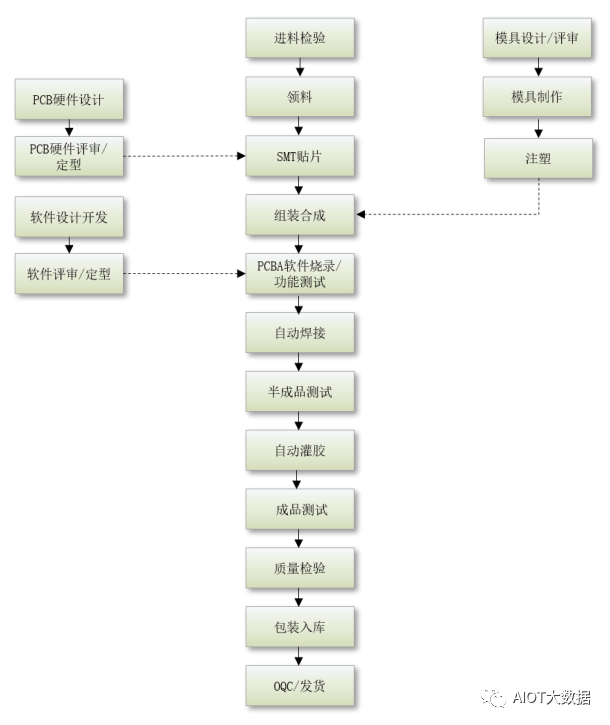
超声波雷达系统产品生产工艺流程图
全球汽车行业发展概况
自二十世纪 90 年代以来,经济贸易的全球化、世界汽车工业产业链分布的 全球化和大规模的跨国兼并重组,从根本上改变了汽车产业的传统资源配置方 式和竞争模式。汽车产业链的全球化具体表现在零部件的全球采购、产品生产 和销售网络的全球化布局和研发体系的专业化分工。 汽车行业全球化的产业链格局催生出了新型专业化分工协作模式,整车企 业与零部件企业形成了基于契约的网络型组织结构,整车企业的零部件全球采 购和零部件生产的全球化模糊了汽车产品的“国家特征”,也推动了汽车行业的 快速发展。特别是 2008 年全球性金融危机之后,全球汽车行业产销量稳步增 长,2015 年全球汽车行业产量达到 9,068 万辆,此后全球汽车年产量持续稳定 在 9,000 万辆以上。2005-2019 年间,全球汽车产量、销量的变动情况如下:
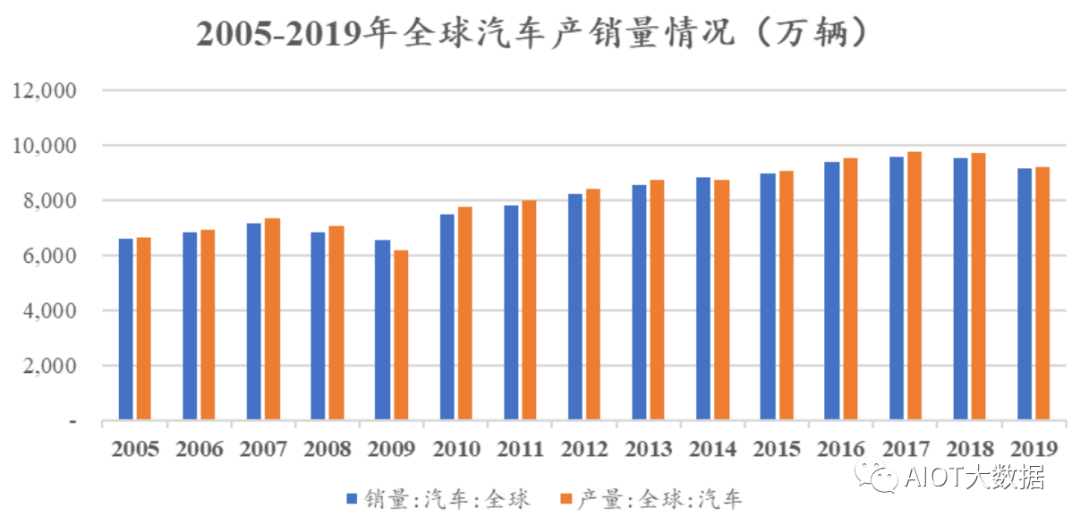
在全球汽车产销量稳步增长的同时,全球汽车市场结构也不断调整,市场 需求的增长逐步由传统发达国家转移到新兴市场国家,尤其是除日本以外的亚 太地区,汽车产量增长强劲。中国从 2009 年开始超越美国,成为全球最大的汽 车销售市场。我国汽车销量从 2005 年的 575.74 万辆增长至 2019 年的 2,576.90 万辆,年复合增长率超过 10%;中国汽车销量占全球汽车销量的比例也从 2005 年的 8.73%增长至 2019 年的 28.23%。
中国汽车行业发展概况
随着 2001 年中国加入世界贸易组织,中国汽车市场逐步开放,我国汽车制 造企业也把握住了全球分工和汽车制造业产业转移的历史机遇,实现了跨越式 发展,现已成为全球汽车工业体系的重要组成部分。同时随着我国经济的不断 发展、人民生活水平的持续提高,居民消费能力尤其是对乘用汽车等的消费能 力快速提高,汽车消费市场规模快速提升。2005-2019 年间,我国乘用汽车产销 量情况如下:
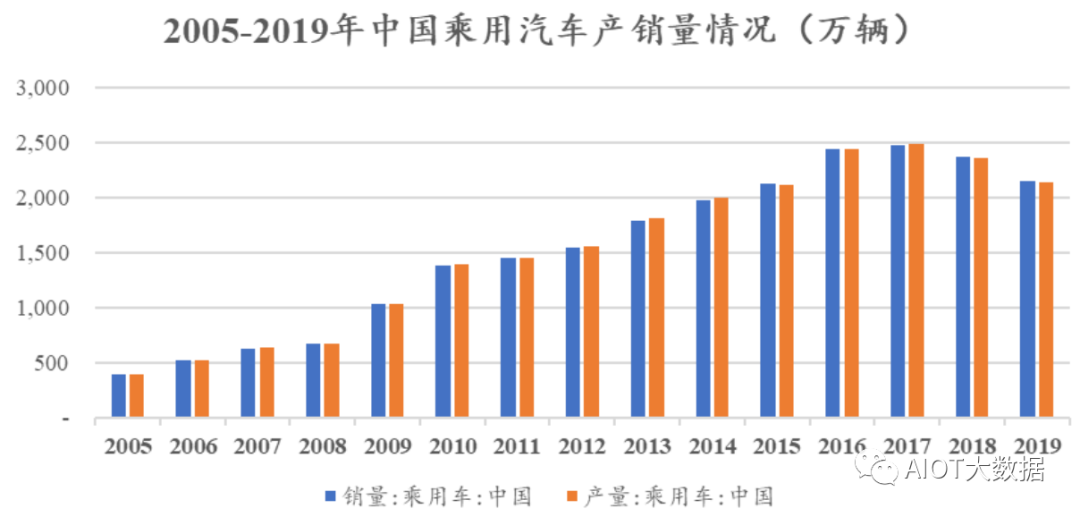
自 2001 年中国加入世贸组织以来,我国汽车产销量逐年增长。2005 年, 我国乘用车产量仅为 397.11 万辆,而到 2017 年,我国汽车产量达到 2,471.83 万 辆,期间年均复合增长率达到 16.46%。虽然 2018 年、2019 年,我国汽车产销 量连续两年出现同比下降的情况,但是自 2015 年以来,我国乘用车的年产销量 均稳定在 2,000 万辆以上,总体市场规模巨大。我国的人均、户均汽车保有量 与发达国家相比仍存在差距,随着居民收入的进一步提高、脱贫攻坚取得全面 胜利,消费升级、拉动内需、促进国内大循环将进一步释放国内的汽车消费需 求,为全行业带来新的市场。
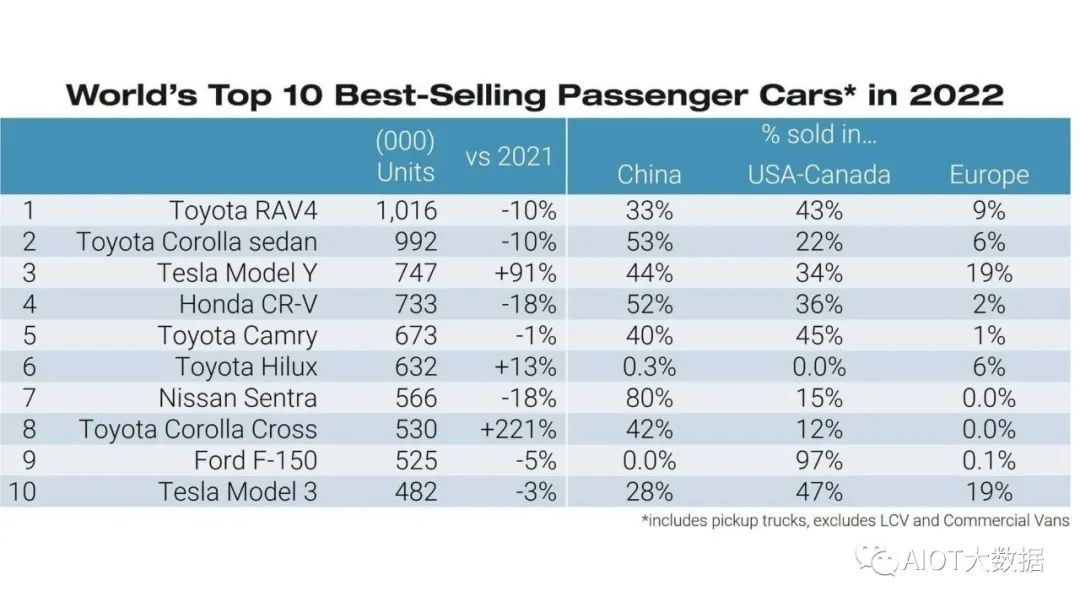
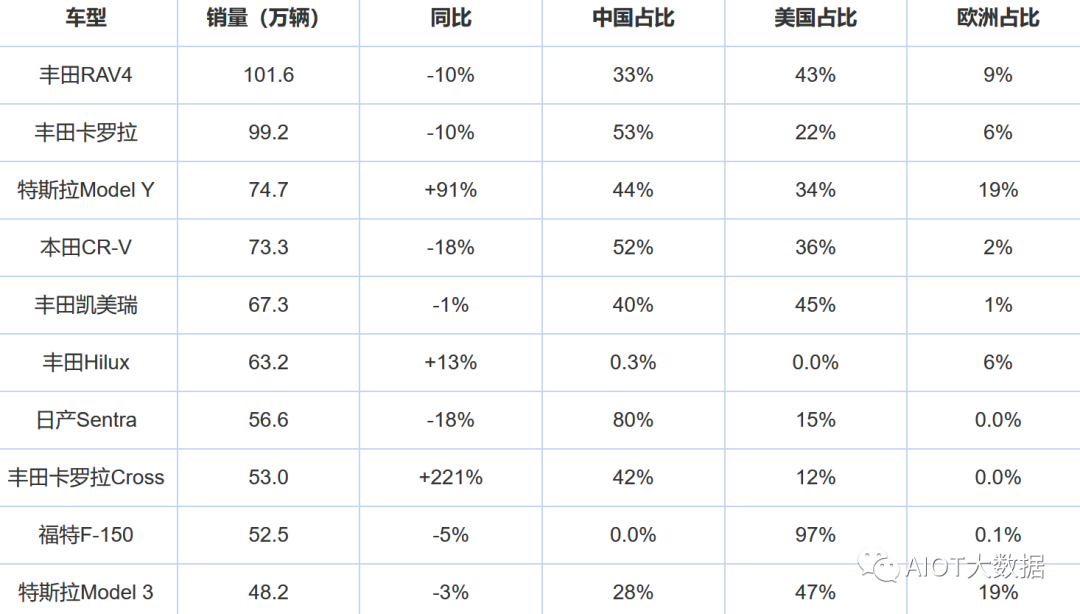
2022年全球共销售了7940万辆新车,相比2021年下降2%,其中北美、欧洲和中国市场均出现下降,而印度、中东、东南亚和非洲等新兴市场则呈现上涨趋势。