






 技术咨询
技术咨询 代买器件
代买器件 商务客服
商务客服 研发客服
研发客服在之前的博文中,我们探讨了使用磁力计进行车辆检测的基本概念。本周,我们将详细探讨理想的传感器放置位置,以及在车辆检测准确度方面所面临的一些难题。
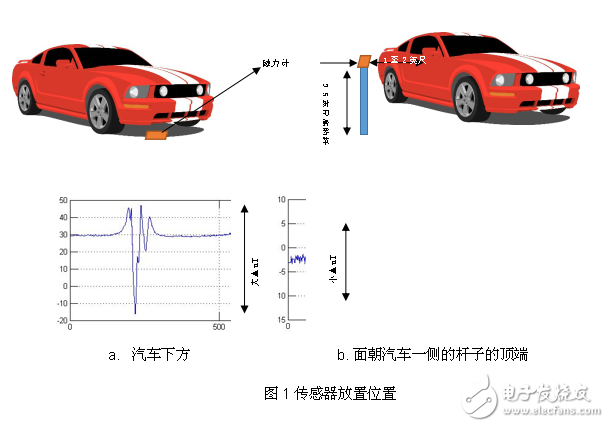
传感器放置位置 受测的磁通线密度强度或场强会随着传感器和车辆之间距离的增大而减弱。这会导致信号变得非常微弱,难以进行事件检测和分析。因此,传感器相对于汽车表面的有效放置位置是一个重要考虑因素。
将传感器安装在道路上(靠近表面)是最常见和有效的方法,如图1所示。由于汽车底部是金属最集中的地方,这种方法被用于检测车辆的存在。另一个理想位置是一根2.5英尺高的杆子顶端,安装在车道侧边,杆子和移动的车辆之间的最佳距离为1至2英尺。
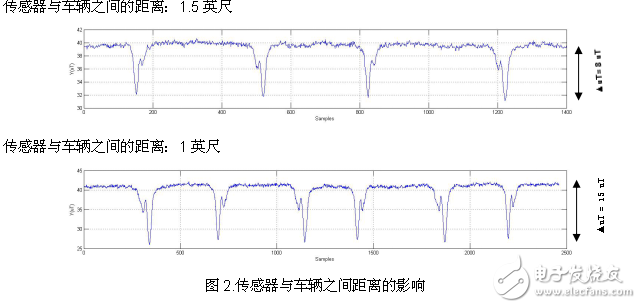
从对应的特征波形图我们可以看出,将传感器放置在路表时,信号波形图中磁场强度的变化更加强烈。图2显示了增大传感器和汽车之间的距离会对受测信号强度产生怎样的影响。
车辆检测难题
好了!我们已经了解了与汽车感应相关的基本概念,现在,让我们用一个基于阈值的简单检测方法来检测一下车辆的存在。举例来说,如果受测信号的RMS值(所有X、Y和Z轴)高于用户定义的阈值,那么车辆会被判定为存在/经过,反之亦然。虽然这种方法看起来很简单,但在某些重要场景中,它可能会生成虚假的正/负触发信号。
考虑到车辆的大小分类(从自行车到卡车),与地磁场接触的黑金属数量也各不相同,因此测量到的信号强度变化也会出现差异。这就意味着采用一个通用的激活阈值并不是一个适合检测所有车辆类型的优良解决方案。
此外,传感器的信号基线(即处于零通量磁场下)也会因温度而产生微小差异。这种随温度变化而产生的偏移量变化可能造成虚假触发信号。因此,我们不是仅仅使用基于阈值的检测方法,而是可以使用模式识别技术来了解相关特征。这有助于获取有意义的时间或频域特性,比如平均值、标准偏差、各轴线之间的关联、最小值/最大值等。最初,可通过获取各类车辆(按尺寸分类)的特征建立训练模型。该模式识别训练模型的效用高低将由训练集的大小决定。因此,在不考虑操作条件的情况下,该模式识别模型能够通过仔细分析特征,帮助我们有效地识别车辆的存在。
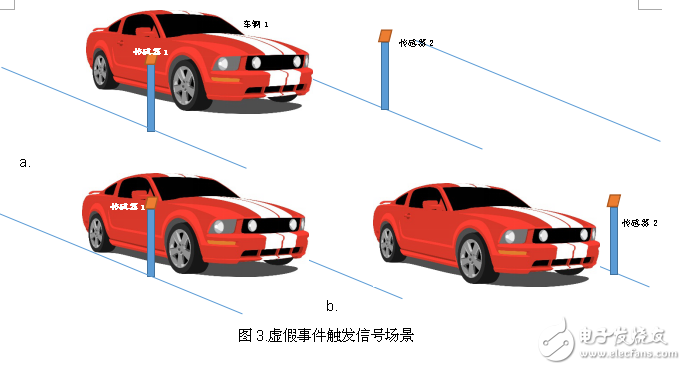
另一个常见而明显的难题是如何防止在图3a所示的场景中出现虚假触发信号问题。传感器2能够感知车辆1的存在吗?我们如何解释这种情况,并防止来自邻近车道的虚假触发信号?
我们可以如图3b所示,将传感器放置在道路尽头,但对于多车道来说非常棘手。所以,一种快速的方法就是利用磁力屏蔽传感器(在本例中为传感器2)的后部,这样可以减少车辆1对传感器2造成的场强幅值。也就是说,如果(车辆经过时)传感器1测量到的信号变化幅值大于传感器2测量到的信号变化,就表示汽车实际是在车道1,而不是车道2。
除了使用磁力计进行单纯的车辆检测之外,在接下来的系列博文中,我们还会介绍一些潜在的使用案例和应用。
相关文章









