基于ADAS嵌入式导航仪电路设计
随着北斗系统的研制与建设,在导航领域我国将会从GPS主宰的局面转向为以我国自主研发的北斗全球导航系统为主的局面。为了实现北斗导航仪更轻便、快捷、低功耗和低成本,提出了一种采用ARM9系列的S3C2440A为处理器的北斗导航仪硬件设计方案,详细给出了系统的硬件体系结构和具体的硬件选型及接口电路设计。并对整个系统进行了硬件平台的搭建和测试,给出了北斗信号处理部分的硬件设计电路板。
核心板电路构成
核心板采用ARM开发板最小系统设计,由S3C2440A处理器作CPU、内存SDRAM、闪存FLASH(NOR FLASH和NANDFLASH)、晶振电路、复位电路和启动配置电路组成。
北斗基带芯片处理模块及电路
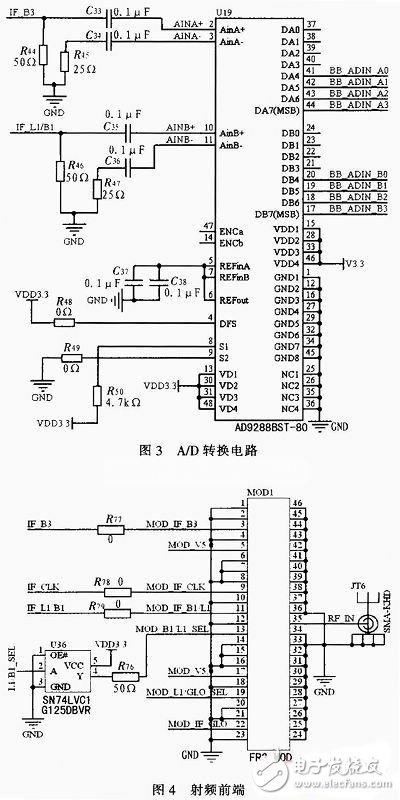
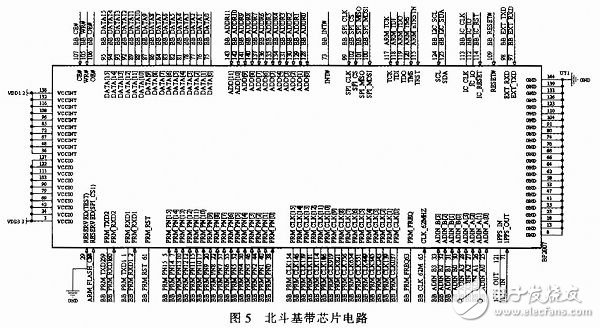
北斗基带芯片采用的是HwaNavchip-1芯片,可快速捕获北斗系统B1和B3频点的精密测距码和北斗/GPS卫星的普通测距码,具有较快的捕获速度、极高的动态跟踪范围和测量精度,通过串口输出标准的二进制或NMEA-0183格式的信号,数据被传送到解析程序进行验证处理,计算出位置信息,并在液晶显示器上进行显示。这部分电路的主要工作原理和过程是将射频信号经过下变频成为模拟中频信号再通过A/D转换得到导航信号,这些信号经过基带处理模块和导航信息处理模块捕获、跟踪、解算得到输出的导航信息。A/D转换和射频前端电路分别如图3、4所示,北斗基带芯片部分电路如图5所示。
底板硬件电路
彩色液晶屏接口及触摸屏驱动电路
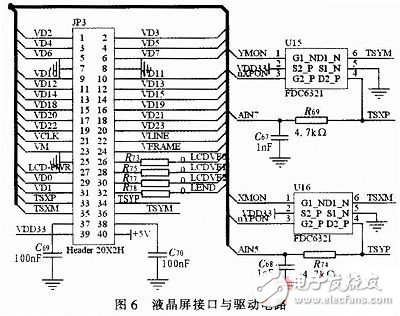
S3C2440A内置有液晶控制器,可以支持最大256 k色TFT彩色液晶屏、最大4 k色STN彩色液晶屏。彩色屏上带有触摸屏(为四线电阻式触摸屏),用于检测屏幕触摸输入信号,有利于提高人机交互的友好性。在使用的时候,需要一套切换控制及ADC转换电路,用于切换触摸屏的X、Y轴输入,并进行A/D转换。接口与触摸屏驱动电路如图6所示。
网络接口电路
S3C2440A本身并没有网络接口,通过扩展网络接口的模式可以为系统提供以太网接入,是本系统的一个重要的功能模块,主要用于电子海图更新以及相关数据上传下载。该电路的核心芯片是DM9000E 10/100M以太网控制器,电路使用16位总线方式进行控制,数据总线DATA0~DATA15与SD0~SD15连接,地址线也进行相对应的连接,片选线nGCS3与芯片的AEN相连。模块电路使用通用的网络接口电路即可。
USB接口电路
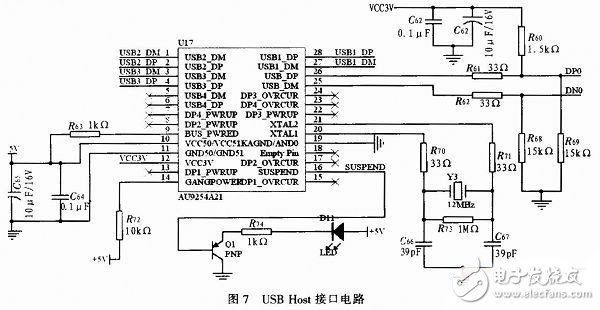
S3C2440A具2两个USB Host控制器和1个USB Device控制器,本设计只使用了DN0、DP0引脚作为唯一的下行口,为此还设计了1个USB集线器电路.通过集线器可以方便对USB下行口进行扩展,USB集线器芯片采用的是MICRO公司的AU9254。用于电子海图、导航定位软件更新,导航数据下载保存等。电路连接如图7所示。
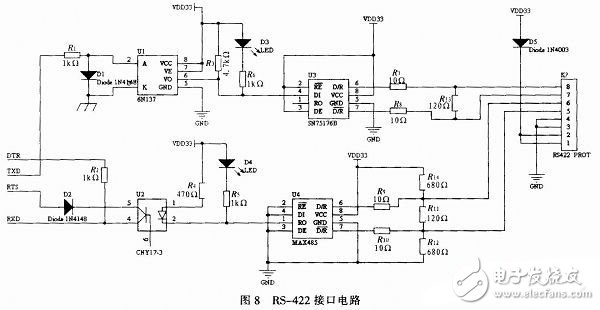
RS-422接口电路
目前船舶驾驶台导航设备均采用RS-422接口进行数据互联,由于接收器采用高输入阻抗和发送驱动器比RS-232更强的驱动能力,允许在相同传输线上连接多个接收节点,所以RS-422支持点对多的双向通信,采用全双工通信模式,差模传输,抗干扰能力强,能给ECDIS和雷达等导航设备提供实时北斗导航定位信息。电路如图8所示。
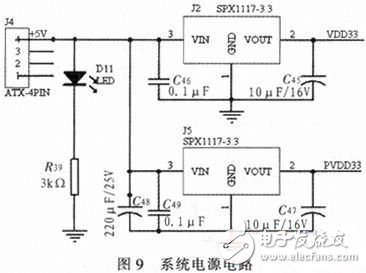
电源电路
本系统使用的电源电路图9所示,5 V的电源经过C46、C48和C49滤波后,由两片低压差电源芯片将电源转换为稳定的3.3 V电源,分别给主板供电(电路图中VDD33)和给核心板供电(电路图中PVDD33)。
本系统的硬件平台为三星公司的S3C2440A微处理器。S3C2440A的核心处理器(CPU)是一个由Advanced RISCMacllines有限公司设计的16/32为ARM920T的RISC处理器。ARM920T实现了MMU、AMBA、BUS及Harvard 高速缓冲体系结构。这一结构具有独立的16KB指令Cache和16KB数据Cache。每个都是由8字节的行组成。通过提供一整套完整的通用系统外设,S3C2440A减少整体系统成本和无需配置额外的组件。
北斗导航接收机主要由射频前端、A/D转换器、基带信号处理和导航解算部分组成。射频前端接收卫星的射频信号,经前置放大器放大后,将信号下变频为中频信号;A/D转换器采样中频信号,把模拟信号量化编码为数字信号;基带数字信号处理部分主要功能为;卫星信号的二维捕获、载波相位和码相位的跟踪,并且测算出伪距;最后导航解算部分采用一定的算法消除模型误差,求解伪距方程,解析出卫星接收机天线的地理位置,从而实现卫星定位。当然这是比较成熟的设计方案,有许多的地方性能需要改进革新,还望能有更好的设计方案。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。