直驱电机选型与应用指南(二)
6、皮带刚性
在基于皮带的传输中,伺服联轴器将输出皮带轮连接到旋转负载。负载的重量由环形轴承支撑。皮带和皮带轮的比例,实际上被限制在 3:1 左右,如果超过该比例,皮带的角度会导致与驱动皮带的皮带轮的表面接触过少。尝试多级皮带轮或过长的皮带来改善这种情况通常不切实际。相反,伺服电机通常尺寸较大,以达到低速应用所需的扭矩。在图 7中,随着电机开始转动,皮带首先根据其弹簧常数偏摆。然后在负载最终移动之前,联轴器也会偏摆。电机联轴器、负载联轴器和长机器轴也会导致刚性损失。

▲随着电机开始转动,皮带首先根据其弹簧常数偏摆。然后在负载最终移动之前,联轴器也会偏摆。
7、齿轮刚性
对于齿轮驱动的变速器,伺服联轴器将齿轮箱输出连接到旋转负载。负载的重量再次由环形轴承支撑。行星齿轮箱和多级齿轮箱通常是低间隙和高刚性应用的首选。
齿轮箱的刚性比皮带高得多,但原理相同。电机拖动输入齿轮,该齿轮偏摆,从而带动输出齿轮,该输出齿轮也发生一定程度的偏摆。与负载的耦合可能偏摆最大。
▲电机联轴器、负载联轴器和长机器轴也会导致刚性损失。
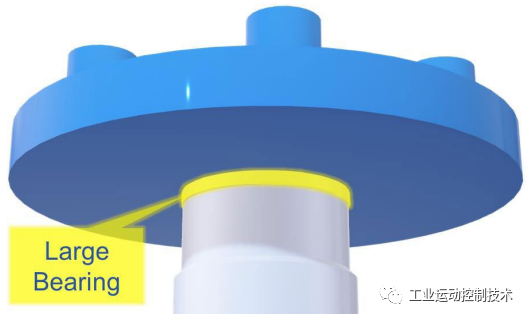
8、直驱刚性
直接驱动电机绕过所有传输组件及其柔性以及相关的谐振频率。直接驱动电机通常配置非常大的轴承,以增加轴向和径向负载能力。这并不是说没有谐振。
谐振频率仍然可以由负载本身产生,或者通过电机和负载之间的任何安装板或延伸部分产生。电机的定子和机架之间甚至会产生共振,就像在基于传输的系统中发现的那样。但是直接驱动系统的高刚性,会导致超出运行系统允许的高谐振频率。
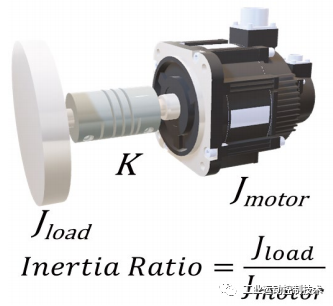
9、负载惯量和加转速度
谐振频率也是负载惯量和电机惯量的函数。在关键性能指标中,这被称为负载与电机惯量比。伺服系统的负载与电机惯量比通常小于10:1,以便通过弹性联轴器对电机的负载进行可接受的控制。
直接驱动应用不使用弹性联轴器,因此可以支持更高的惯量比。尽管如此,负载惯量对于直接驱动电机来说还是很重要的,因为根据牛顿第二定律,它会限制加速度和减速度,还会影响轴承寿命。直接驱动电机的低摩擦意味着几乎所有停止移动负载的动力,都必须由电子驱动系统提供,这也会限制最大负载。
▲直接驱动电机的低摩擦意味着几乎所有停止移动负载的动力,都必须由电子驱动系统提供,这也会限制最大负载。
10、间隙和旋转驱动变速器
旋转驱动变速器的性能受到间隙的影响。当机构反转时,会造成空转。齿轮箱在驱动链轮和输出链轮之间,有一定的间隙。对于皮带系统,间隙发生在皮带和皮带轮的齿之间。
制造商已经开发出方法来减少驱动传输中的间隙,并在控制系统中对其进行电子补偿。但总会有一定程度的间隙,而且随着传输机构的磨损,它往往会变得更糟。结果是,负载的位置不能完全由电机编码器的位置确定。并且由于在反转时负载会在短时间内与电机断开连接,它还可能导致调谐不稳定和噪声运营。
。
由于在反转时,负载会在短时间内与电机断开连接,间隙会导致调谐不稳定和噪声运行。直接驱动电机是唯一可以实现零间隙的旋转驱动机构。由于电机与负载直接相连,因此电机编码器测得的负载位置更接近负载本身。
11、位置稳定时间
刚性、负载惯量、惯量比和间隙,都是使传动机构位置稳定时间恶化的关联因素。位置稳定时间,是指从指令动作结束与机构实际停止之间的延迟。减少这种延迟对于许多具有短程动作的应用尤其重要。等待机器停止,可能占到整个周期相当大的一部分。
请记住,这些传动机构的位置由旋转伺服电机的编码器测量。编码器可以显示负载以较短的时间稳定下来。这意味着编码器已停止移动。负载可能仍在运动中,尚未稳定或正经历振动和振荡。
传输系统的刚性和间隙会干扰通过编码器测量的稳定时间。然而,在直接驱动电机中,编码器本质上是固定在负载本身上的,报告负载的真实稳定时间。由于其高刚性和零间隙,通过良好的调整可以显著减少直接驱动电机的稳定时间,同时还需要尽可能的减轻源自负载本身的振动。
齿轮箱和皮带可实现的稳定时间,通常受到机械刚性和间隙水平的影响,齿轮箱的性能通常优于皮带。这些机构的位置是通过旋转伺服电机的编码器测量的。
编码器可能表示负载已以较短的建立时间稳定,但它的真正含义是编码器已停止移动。负载可能仍在运动中但尚未稳定,或者可能正在经历振动。
传动装置的刚性和间隙会干扰通过编码器测量稳定时间。在直接驱动电机中,编码器基本上是固定在负载本身上,用于报告负载的真实稳定时间。
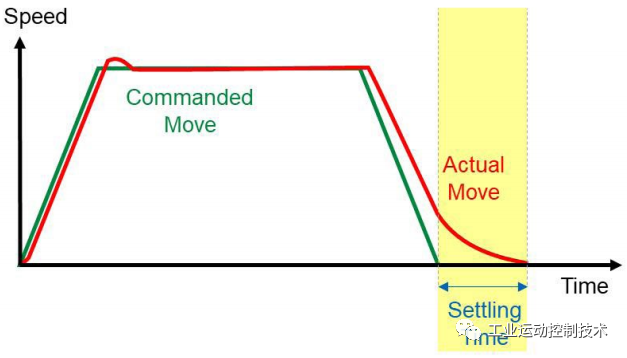
▲位置稳定时间是移动指令结束与机构停止之间的延迟。减少延迟,对于许多具有短程动作的应用尤其重要。等待机器停止,可能占整个周期相当大的一部分。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。