基于STM32F407的FreeRTOS学习笔记(3)
上一期学习了任务的创建和删除,这一期学习任务的挂起与恢复。
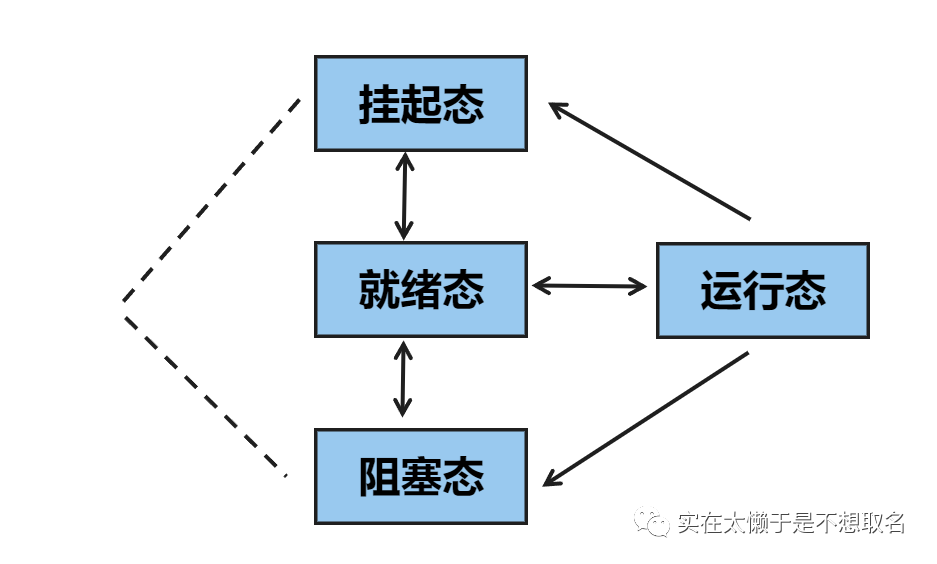
所谓的挂起,也可以认为是 暂停 ,将运行中的任务挂起后,任务将暂停运行,直至系统恢复任务的运行。
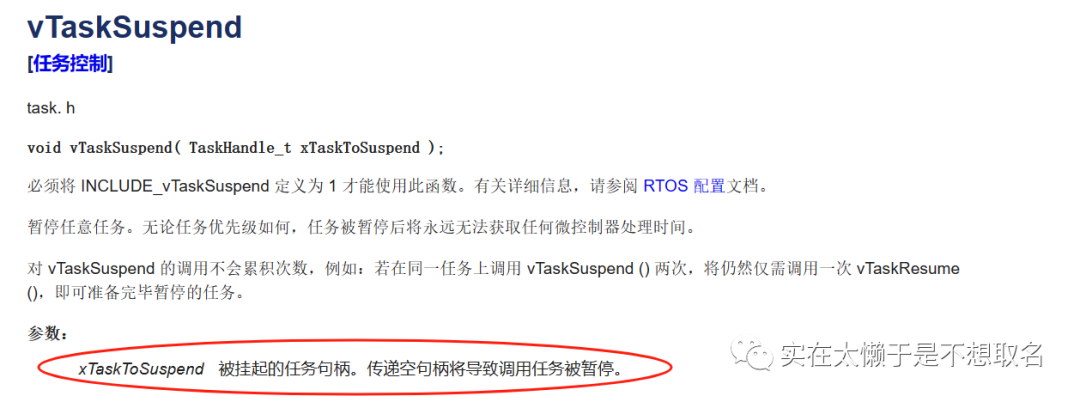
在FreeRTOS的API文档中找到任务挂起函数的介绍,函数需要的参数为我们想要挂起的任务句柄,如果传递为NULL则暂停我们的调用任务。
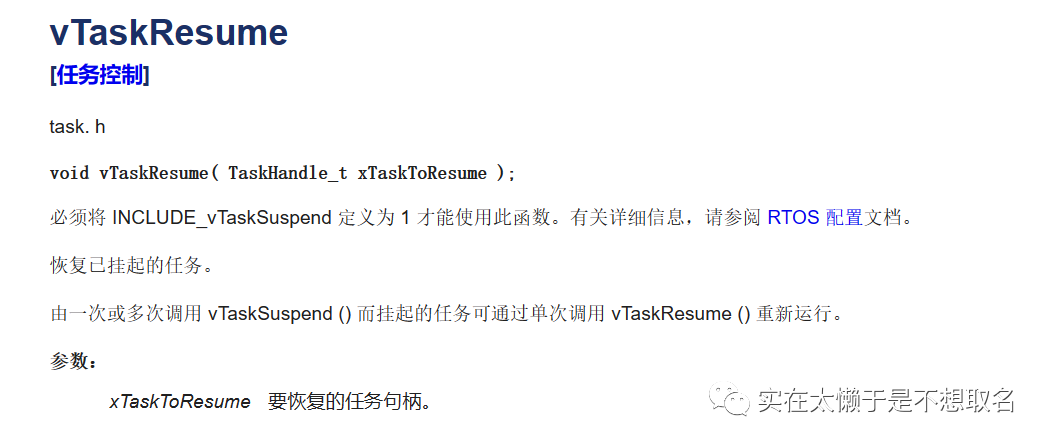
同样的,在文档中也可以找到恢复任务函数介绍。
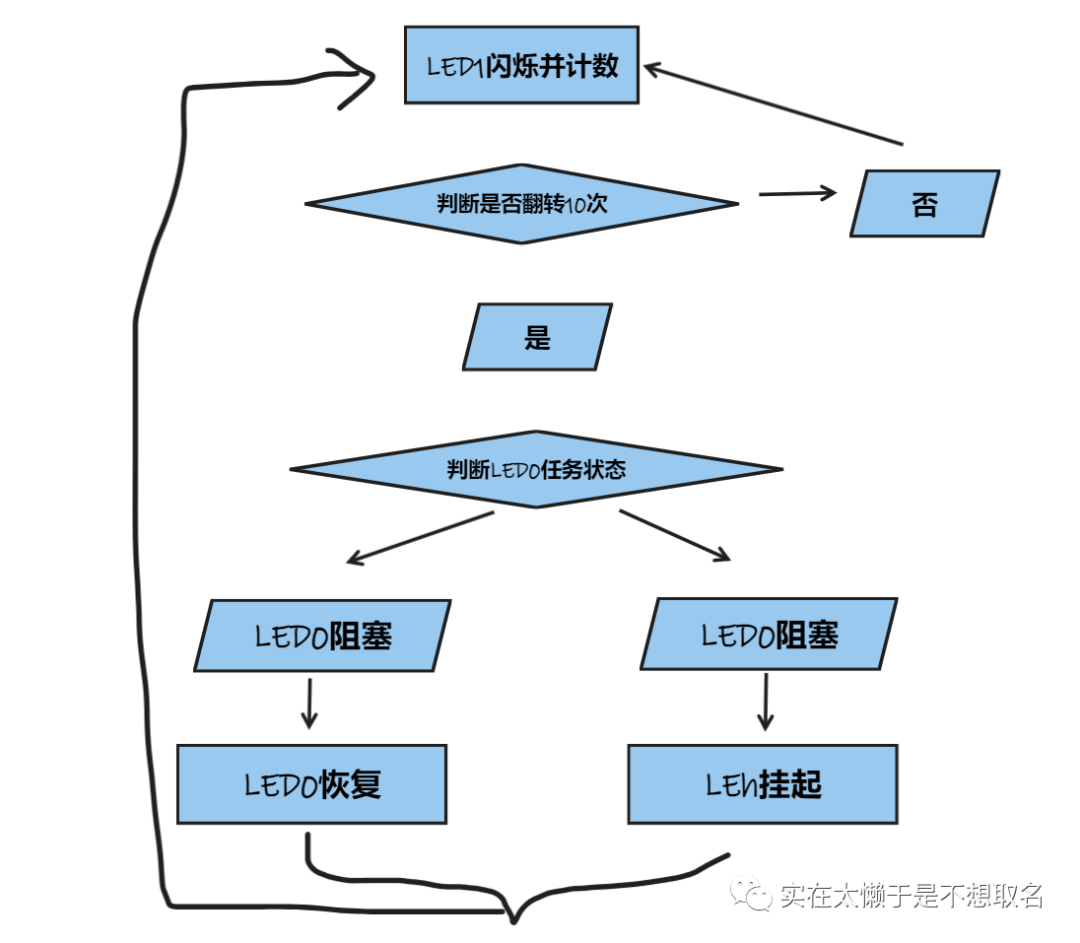
接下来我们实现一个任务,目标是当LED1闪烁5次后挂起LED0闪烁的任务,当LED1再闪烁5次后恢复LED0闪烁的任务。
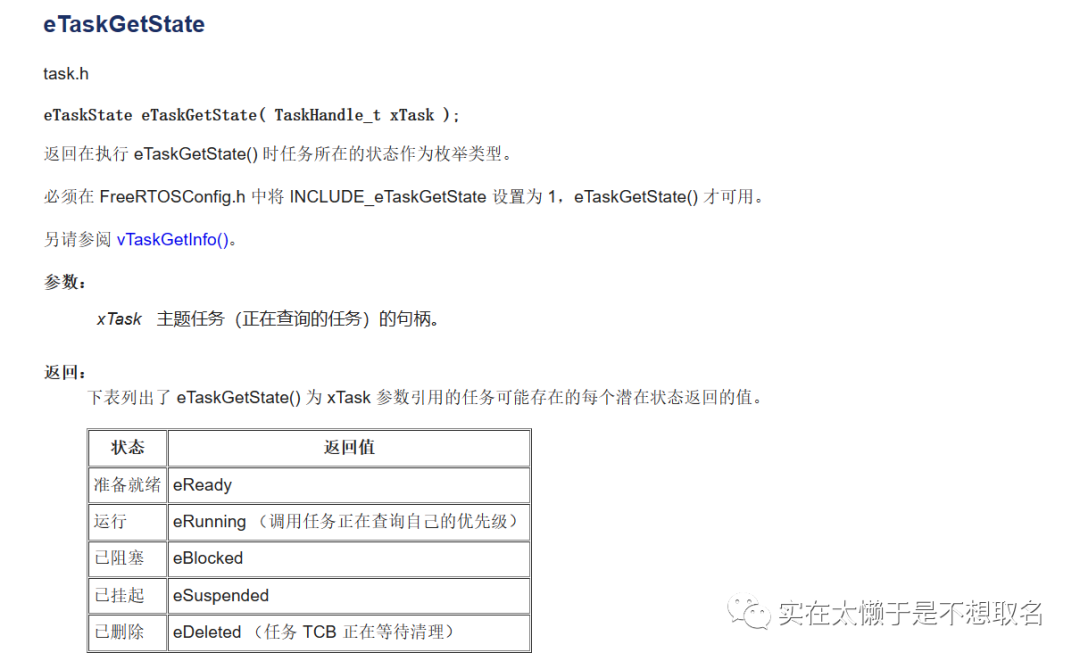
我们在API中找到查询任务状态的函数eTaskGetState,该函数传入参数为任务句柄,返回参数为任务状态。
LED0在进行vTaskDelay时是处于阻塞态,因此我们只需要判断LED0是阻塞状态还是挂起状态,再进行挂起和恢复操作。
因此我们的代码如下
void LED_TOG2(void * pvParameters)//参数为 void * pvParameters
{
while(1)
{
printf("LED_TOG2 runningrn");//串口打印运行信息
HAL_GPIO_TogglePin(GPIOF,GPIO_PIN_9);//LED0翻转
LED2_Number++;//LED0翻转计数
if(LED2_Number %10==0)
{
if(eTaskGetState(LED_TOG_Handler) == eSuspended)
{
vTaskResume(LED_TOG_Handler);//LED0任务恢复
}
if(eTaskGetState(LED_TOG_Handler) == eBlocked )
{
vTaskSuspend(LED_TOG_Handler);//LED0任务挂起
}
}
vTaskDelay(500);//延迟500ms
}
}
void Start_LED(void * pvParameters)
{
taskENTER_CRITICAL();
xTaskCreate((TaskFunction_t )LED_TOG,//任务函数
(char * )"LED_TOG",//任务名称
(configSTACK_DEPTH_TYPE) 128,//堆栈空间128Byte
(void* ) NULL,//无返回
(UBaseType_t ) 1,//优先级1
(TaskHandle_t * )&LED_TOG_Handler);//任务函数句柄
xTaskCreate((TaskFunction_t )LED_TOG2,//任务函数
(char * )"LED_TOG2",//任务名称
(configSTACK_DEPTH_TYPE) 128,//堆栈空间128Byte
(void* ) NULL,//无返回
(UBaseType_t ) 2,//优先级1
(TaskHandle_t * )&LED_TOG2_Handler);//任务函数句柄
taskEXIT_CRITICAL();
vTaskDelete(NULL);
}
在第10 和 17行,上期编写时xTaskCreate第六个参数传入的应该是TaskHandle_T *类型,即句柄指针,而上期写的时候忘记加&取地址符号会导致在这期调用挂起函数时整个程序卡死。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。