如何用STM32让相对编码器说话?
▍编码器的由来和原理
若要对伺服系统中的电机进行高精度控制,需要准确的转子角度位置,这时候自然会想到,如果能张江转子每一圈进行细分,这样每次转多少角度便能精确知道。在这样的背景下,相对编码器就诞生了。
在网上找到下文这个图,很形象的表征了相对编码器的原理。
如图所示,在码盘上平均开出很多个等间距的槽,一段是LED灯发出信号,另一端是接收器接收信号。如果信号能穿过码盘,则接收信号为高电平,反之则为低电平。这样当转子转起来以后,就不断的处高低电平。这就是编码器基本原理。
可以看到这里有三个信号,A/B/Z,这时候就要想为什么要3个信号呢?如果仅仅对一圈做细分,命名一个信号就可以了。这就涉及到下面两个问题。
(1)如果是1个信号channel A,电机是正转还是反转就不知道了。需要一个相对的参考信号channel B,A和B相互呈一个角度,这样通过A和B的相对位置就能知道电机是顺时钟转还是逆时针转了。
(2)如果是2个信号,其中一旦有码盘有损坏,就可能出现检测结果无法校验的情况。举个例子,如果一圈开了16个槽,则每旋转一圈,正常情况下就有16个高低电平的信号出来。但如果一个槽坏了,实际上每转一圈只有15个信号出来,但这时如果仅仅通过channel A和channel B是无法判断的。在进行数据处理时还是认为16个信号为一圈,处理结果就有较大的偏差。为了避免这样的问题,补充z信号,一圈只出一个,这样就能相互交验了。一方面通过对A或者B计数,知道z是否有问题,反之对z信号计数就能知道A/B是否有问题。
所以就有了上图的z/A/B三个信号,共同组成了一个功能齐全的编码器。
在网上经常看到说A/B之间相互差90°,这个90°是认为360°为一个周期而言的。如下图所示。通过看A/B相对位置就知道电机是正转还是反转了。
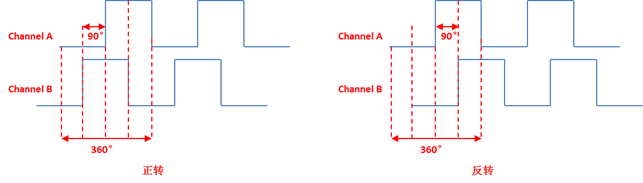
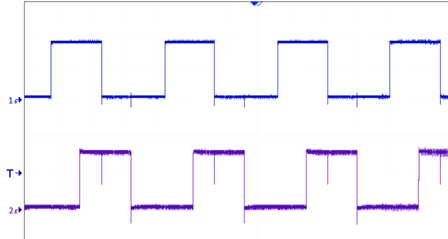
实测波形,如下图所示(示波器不太好,有点毛刺)
正转
反转
▍使用STM32,让编码器说话
背景
STM32中提供了编码器接口,比较适用于相对编码器的应用场景。在手册中可以看到:
可以看到这里使用专用的模块就能完成相应的计数,通过数据的变化就能测出电机的转速。
所以,我想让编码器说话。在家翻箱倒柜以后,我准备了如下几个东西:
(1)带编码器的直流电机:这是作为编码器的载体使用,电机编码器的分辨率较低,每圈只有16个脉冲。但不影响测试。
(2)直流电源:用来直观的调电机的转速和正反转。
为了避免打广告的嫌疑,就不贴电源和电机图片了。
(3)STM32开发板:在家翻箱倒柜,找出2015年在21ic获得的STM32072 discovery板
(4)LED数码管。用来通过编码器的数据处理,显示电机的转速。
试验第一步,让LED数码管显示起来。
因为显示数据是最终目的。使用的这个板子,是集成了HC595锁存器的板子。相比于网上买的大部分51开发板数码管电机设计,使用两个HC595,可以大大减少pin脚的数量。网上使用的4位数码管,需要8个pin作为段选或者位选,非常麻烦。
根据HC595的手册,具有锁存加移位的特性(图中我标注所示)
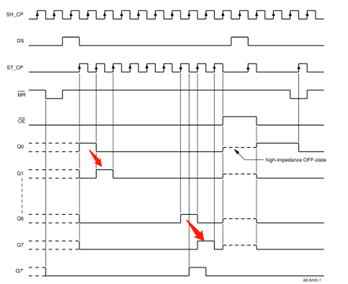
最上面的3个SH-CP/DS/ST-CP,像极了SPI通信波形,只要合理配置,只需要3个信号线即可完成4数码管的轮流显示。
于是在开发板的pin做了如下硬件配置
Pin(数码管) 74HC595SPIPin
SCLKPin11(shift)SPICLKPB13
RCLKPin12(Storage)NSSPB12
DIOPin14(datainput)SPIMOSIPC3
QHPin9(dataoutput)SPIMISOPC2
SPI配置代码如下(配置了SPI几个pin脚的定义,时钟,SPI模式等):
void SPI_Digital_Tube_Config(void){ SPI_InitTypeDef SPI_InitStructure; GPIO_InitTypeDef GPIO_InitStructure;
/* Disable the SPI peripheral */ SPI_Cmd(SPI2, DISABLE); /* Enable SCK, MOSI, MISO and NSS GPIO clocks */ RCC_APB1PeriphClockCmd(RCC_APB1Periph_SPI2, ENABLE); RCC_AHBPeriphClockCmd(SPI_Digital_Tube_SCK_GPIO_CLK | SPI_Digital_Tube_MOSI_GPIO_CLK| SPI_Digital_Tube_NSS_GPIO_CLK, ENABLE);
/* SPI pin mappings */ GPIO_PinAFConfig(SPI_Digital_Tube_SCK_GPIO_PORT, SPI_Digital_Tube_SCK_SOURCE, SPI_Digital_Tube_SCK_AF); GPIO_PinAFConfig(SPI_Digital_Tube_MOSI_GPIO_PORT, SPI_Digital_Tube_MOSI_SOURCE, SPI_Digital_Tube_MOSI_AF); GPIO_PinAFConfig(SPI_Digital_Tube_MISO_GPIO_PORT, SPI_Digital_Tube_MISO_SOURCE, SPI_Digital_Tube_MISO_AF); GPIO_PinAFConfig(SPI_Digital_Tube_NSS_GPIO_PORT, SPI_Digital_Tube_NSS_SOURCE, SPI_Digital_Tube_NSS_AF);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_DOWN; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_Level_3;
/* SPI SCK pin configuration */ GPIO_InitStructure.GPIO_Pin = SPI_Digital_Tube_SCK_PIN; GPIO_Init(SPI_Digital_Tube_SCK_GPIO_PORT, &GPIO_InitStructure);
/* SPI MOSI pin configuration */ GPIO_InitStructure.GPIO_Pin = SPI_Digital_Tube_MOSI_PIN; GPIO_Init(SPI_Digital_Tube_MOSI_GPIO_PORT, &GPIO_InitStructure);
/* SPI MISO pin configuration */ GPIO_InitStructure.GPIO_Pin = SPI_Digital_Tube_MISO_PIN; GPIO_Init(SPI_Digital_Tube_MISO_GPIO_PORT, &GPIO_InitStructure);
/* SPI NSS pin configuration */ GPIO_InitStructure.GPIO_Pin = SPI_Digital_Tube_NSS_PIN; GPIO_Init(SPI_Digital_Tube_NSS_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT; GPIO_InitStructure.GPIO_Pin = SPI_Digital_Tube_NSS_PIN; GPIO_Init(SPI_Digital_Tube_NSS_GPIO_PORT, &GPIO_InitStructure);
/* SPI configuration -------------------------------------------------------*/ SPI_I2S_DeInit(SPI2); SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; SPI_InitStructure.SPI_DataSize = SPI_DataSize_16b; SPI_InitStructure.SPI_CPOL = SPI_CPOL_Low; SPI_InitStructure.SPI_CPHA = SPI_CPHA_1Edge;// SPI_InitStructure.SPI_NSS = SPI_NSS_Hard; SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_256; SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; SPI_InitStructure.SPI_CRCPolynomial = 7; SPI_InitStructure.SPI_Mode = SPI_Mode_Master; SPI_Init(SPI2, &SPI_InitStructure);
/* Initialize the FIFO threshold */ SPI_RxFIFOThresholdConfig(SPI2, SPI_RxFIFOThreshold_QF);
/* Enable the SPI peripheral */ SPI_Cmd(SPI2, ENABLE);
// /* Enable NSS output for master mode */// SPI_SSOutputCmd(SPI2, ENABLE);}
使用TIM6作为定时器,配置代码如下(1ms定时周期):
static void BASIC_TIM_Mode_Config(void){ TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; BASIC_TIM_APBxClock_FUN(BASIC_TIM_CLK, ENABLE); TIM_TimeBaseStructure.TIM_Period = BASIC_TIM_Period;//1ms TIM_TimeBaseStructure.TIM_Prescaler= BASIC_TIM_Prescaler;//47 TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1; TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up; TIM_TimeBaseStructure.TIM_RepetitionCounter=0; TIM_TimeBaseInit(BASIC_TIM, &TIM_TimeBaseStructure); TIM_ClearFlag(BASIC_TIM, TIM_FLAG_Update); TIM_ITConfig(BASIC_TIM,TIM_IT_Update,ENABLE); TIM_Cmd(BASIC_TIM, ENABLE); }
实际上每次只会有一个数码管亮,为了较好的视觉体验,将数码管进行千位百位十位个位循环显示,这样做的好处是4个数码管轮流显示,其亮度相同,避免出现一个数码管过亮的情形,影响视觉体验。数码管代码如下:
void DisplayNumber(uint16_t num){ uint8_t mythousandNum,myhundredNum,mytenNum,myunitNum=0; if(num》9999)num=9999; mythousandNum=num/1000%10; myhundredNum=num/100%10; mytenNum=num/10%10; myunitNum=num%10; switch(mydisplaybit) { case thousaud: Display16(mythousandNum,4); mydisplaybit=hundred; break; case hundred: Display16(myhundredNum,3); mydisplaybit=ten; break; case ten: Display16(mytenNum,2); mydisplaybit=unit; break; case unit: Display16(myunitNum,1); mydisplaybit=thousaud; break; default: Display16(mythousandNum,4); mydisplaybit=hundred; break; }}
static void Display16(uint8_t num,uint8_t place){ GPIO_ResetBits(SPI_Digital_Tube_NSS_GPIO_PORT, SPI_Digital_Tube_NSS_PIN); uint16_t Temp=((Num[num])《《8)+((0x01)《《(place-1)); SPI2_Send_Byte16(Temp); GPIO_SetBits(SPI_Digital_Tube_NSS_GPIO_PORT, SPI_Digital_Tube_NSS_PIN);}
然后,每隔0.5s累加一次。在定时器中累计
void TIM6_DAC_IRQHandler(){ static uint16_t counter=0; static uint16_t num_buffer=0; if ( TIM_GetITStatus( BASIC_TIM, TIM_IT_Update) != RESET ) { counter++; if(counter》499) { num_buffer++; counter=0; } DisplayNumber(num_buffer); TIM_ClearITPendingBit(BASIC_TIM , TIM_FLAG_Update); } }
所以,初试成功。
试验第二步,让编码器说话。
首先,在STM32中配置编码器。
使用PA6和PA7作为定时器3的通道1和通道2,进行下图模式的计数。
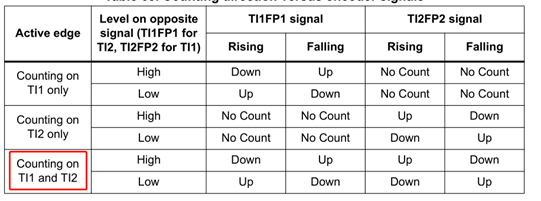
即效果如下:
代码如下
void TIM3_EncoderConfig(void){ TIM_ICInitTypeDef TIM_ICInitStructure; TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; GPIO_InitTypeDef GPIO_InitStructure; NVIC_InitTypeDef NVIC_InitStructure;
HALL_TIM_APBxClock_FUN(ENCODER_TIM_CLK, ENABLE);
/* GPIOA clock enable */ RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOA, ENABLE); //PA6 & PA7 RCC_AHBPeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE); /* phase A & B*/ GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL; GPIO_Init(GPIOA, &GPIO_InitStructure); GPIO_PinAFConfig(GPIOA, GPIO_PinSource6, GPIO_AF_1);//TIM3_CH1 GPIO_PinAFConfig(GPIOA, GPIO_PinSource7, GPIO_AF_1);//TIM3_CH2
TIM_DeInit(TIM3); TIM_TimeBaseStructure.TIM_Period =0xffff; TIM_TimeBaseStructure.TIM_Prescaler =0; TIM_TimeBaseStructure.TIM_ClockDivision =TIM_CKD_DIV1; TIM_TimeBaseStructure.TIM_CounterMode =TIM_CounterMode_Up; TIM_TimeBaseInit(TIM3,&TIM_TimeBaseStructure);
TIM_EncoderInterfaceConfig(TIM3,TIM_EncoderMode_TI12,TIM_ICPolarity_BothEdge,TIM_ICPolarity_BothEdge);
TIM_ICStructInit(&TIM_ICInitStructure); TIM_ICInitStructure.TIM_ICFilter = 0; TIM_ICInit(TIM3, &TIM_ICInitStructure);
// Clear all pending interrupts TIM_ClearFlag(TIM3, TIM_FLAG_Update); TIM_ITConfig(TIM3, TIM_IT_Update, ENABLE);
//Reset counter TIM_SetCounter(TIM3,0); TIM_Cmd(TIM3, ENABLE);
/* Enable the TIM1 global Interrupt */ NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; NVIC_InitStructure.NVIC_IRQChannelPriority = 0; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_Init(&NVIC_InitStructure);}
然后在中断服务函数中,将编码器的相对值计算出来,并根据编码器计数的相对变化,计算出电机的转速。具体代码如下:
void TIM6_DAC_IRQHandler(){ static uint16_t counter=0; static uint16_t num_buffer=0; static uint16_t temp_now=0; static uint16_t temp_pre=0; static uint16_t speed=0; if ( TIM_GetITStatus( BASIC_TIM, TIM_IT_Update) != RESET ) { counter++; temp_now=(TIM_GetCounter(TIM3)&0xffff); if(counter》499) { num_buffer=(temp_now-temp_pre)》0?temp_now-temp_pre:temp_pre-temp_now; speed=100*num_buffer*60/64; counter=0; } DisplayNumber(speed); if(counter%10==0)temp_pre=temp_now; TIM_ClearITPendingBit(BASIC_TIM , TIM_FLAG_Update); } }
同时,为了防止TIM3中断溢出,记得清除中断标志位
void TIM3_IRQHandler (){ if(TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET) { TIM_ClearITPendingBit(TIM3, TIM_IT_Update); }}
实际效果如下图所示(东西太多,手机不好拍动图,只能静物显示),可知,当电机电压9.32V时,转速为843rpm。当电压为18.7V时,转速为1687rpm。编码器的波形也用示波器显示出来了。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。