






 技术咨询
技术咨询 代买器件
代买器件 商务客服
商务客服 研发客服
研发客服短短的一年时间,自带内卷体质的中国车企已经将搭载城区NOA功能的高阶智驾车型价格打到了逼近20万元大关。最新的价格标杆是小鹏G6,三月初,G6全系车型限时立减2万,其中,高阶智驾版的价格不足21万元。
可想而知,20万绝对不是终点,随着友商的入局和价格战的持续,搭载高阶智驾系统的车型价格势必还会一降再降。先降到18万,再慢慢迈向16万?人们在心中默默盘算着合理的下降曲线,“毕竟科技平权需要时间”!
不过,现在看来,普及高阶智驾的进程也许要大大加速了。因为,在刚刚结束的电动汽车百人会上,何小鹏宣布小鹏汽车将推出“年轻人的第一台AI智驾汽车”,进军10-15万级汽车市场。一杆子降到底?果真如此,AI智驾汽车可能会加速普及,到那时,高阶智驾就真的是飞入寻常百姓家了。
听过一次又一次的牛皮,耳边飘过一次又一次虚无缥缈的承诺,稳重的成年人都学到了,不轻信、不盲信是正确解读中国本土车圈大佬发言的前置态度,那么,小鹏汽车这次是不是在吹牛皮?
问题的本质,成本控制
是不是吹牛皮,这种容易引发无脑喷和无脑吹的问题可以用另外一个更加严肃且更加方便探讨的问题代替,即小鹏汽车有没有能力实现去年提出的高阶智驾系统成本减半?说到底,这就是一个成本控制问题。
一个成功的高科技产品在搭载各项先进技术的同时,必须考虑成本的约束。高阶智驾技术向中低价位车型的渗透也将不可避免地遭遇成本问题。那么,在必须考虑收支平衡的商业世界,高阶智驾系统的成本要控制在什么范围之内,才能实现渗透率的提升呢?在2024年的电动汽车百人会上,何小鹏给出的答案是:高阶智驾系统的成本需要控制在1万到2万元之间。
这是一个比较合理的数字,因为,在2023年的电动汽车百人会上,大疆车载给出过一个相近的说法:L2+智能驾驶系统的成本要控制在5000元到15,000元之间。以“性价比”著称的大疆车载和喜提“纯电卷王”美名的小鹏汽车的说法其实并不矛盾,因为,按照业界通行的划分自动驾驶等级的方法论,一般将搭载高速NOA功能的智驾系统等级标定为L2+,搭载城区NOA功能的智驾系统等级标定为L2++,实现全场景NOA功能的智驾系统等级标定为L2+++。和大疆车载的说法相比,何小鹏口中的高阶智驾含量多了一个加号,多出的5000元就在这里。

图片来源:大疆车载
降本方案其实是一个明牌,很多读者朋友可能已经在心里面抢答了:阉割激光雷达。
车百智库曾经在2023年发布的《自动驾驶全场景商业化应用(2022)》里估算过小鹏P5智驾系统感知传感器的成本。根据当时的数据,小鹏P5感知传感器系统的总成本为13,245元,成本大头是两颗7660元的激光雷达,激光雷达的成本占比高达58%。不过,在过去的一年中,激光雷达的价格出现了明显的下降,成本占比大概降到了一半左右。
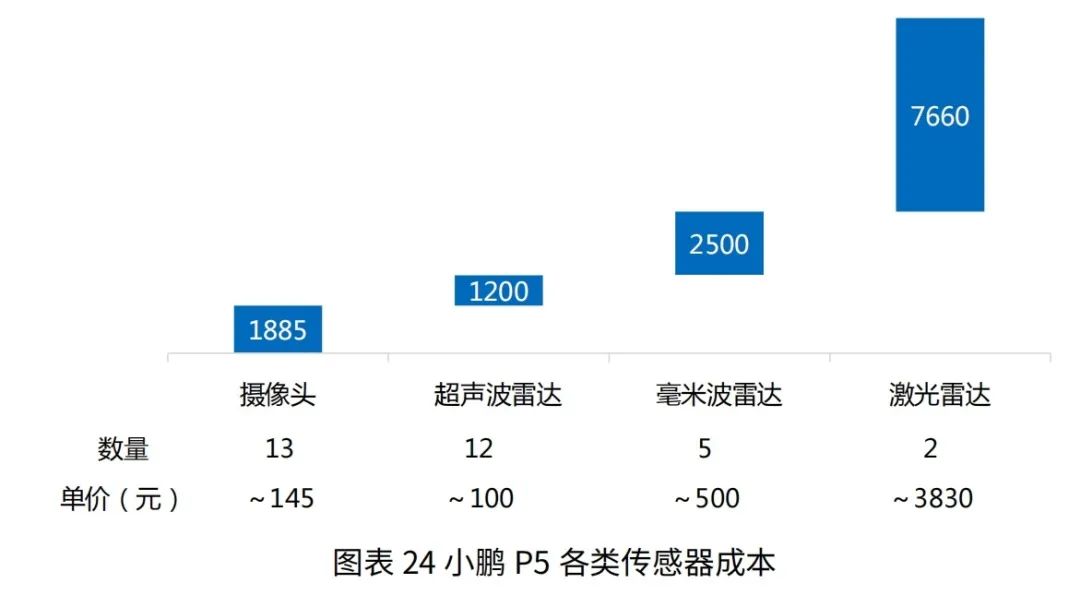
图片来源:车百智库
去激光雷达的手段可谓简单粗暴,但是,降本的同时必须遵守保证高阶智驾功能基本不降级的前提。如果伴随着成本削减的是功能明显降级,那还有什么意义?所以,问题再次发生了转变:去激光雷达之后,还能不能保得住智驾等级中的“加号”?
在过去的几年里,纯视觉派和激光雷达派有过多次争论,不过,多数人不过是立场之争,并没有触及到问题的本质。要找到到底能不能去激光雷达这个问题的答案,其实可以结合BEV和占用网络这两个对城区NOA功能最重要的技术栈,拆解成两个问题:(小鹏的)BEV有没有做到去激光雷达,(小鹏汽车)是不是能以纯视觉方式实现占用网络?
如果不可以,激光雷达再贵也没法丢弃,如果可以,激光雷达再便宜,用它又有什么意义?
小鹏汽车的BEV和占用网络做到了什么程度,我们可以从他们的技术分享里去找答案。在2023年的CVPR会议上,小鹏汽车的前AI团队负责人刘兰个川做了一次主题演讲,介绍了小鹏汽车在过去的几年中智能驾驶技术上的成果和重大进展。在BEV感知环节,刘兰个川表示XNet是一个以视觉为中心的系统,先通过Backbone对来自摄像头的信息进行特征提取,再通过Transformer的交叉注意力机制将融合特征转换到BEV空间,下面这张图显示,BEV感知不会用到来自激光雷达的信号,换句话说,XNet的BEV已经实现了去激光雷达,考虑到激光雷达的成本,图里的“cost- effective”就来自这里。
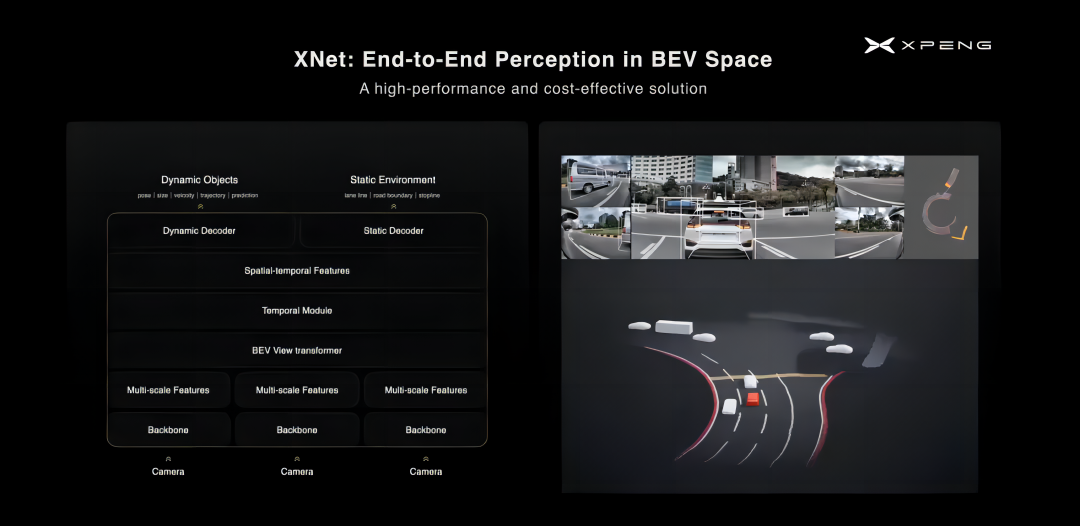
图片来源:小鹏汽车
BEV可以去激光雷达,那么占用网络呢,通用障碍物的感知呢?还是在这次会议上(时间为2023年6月份),刘兰个川在问答环节中表示,小鹏汽车在占用网络里使用了激光雷达。
激光雷达之于高阶智驾的主要作用是通用障碍物的识别。通用障碍物和占用网络的关系可以这么来理解:虽然BEV识别不出来前方某个物体到底是什么,但是,激光雷达的3D点云信息明明白白地表示,有个物体在那里,那里的空间已经被“占用”了,被占用的空间大概率不是可行驶区域。
3D点云确实大有作用,但并非必选项。理论上,如果能够依靠纯视觉神经网络实现对障碍物距离信息的精准估计,激光雷达的权重就可以大大降低,甚至从占用网络中被排除出去。因为,从第一性原理出发,人类的眼睛(生物形式的感知传感器)和大脑(生物形式的神经网络)可以估计距离信息,类比过来,数字形式的感知传感器(摄像头)和数字形式的神经网络只要被训练得足够充分,也可以估计障碍物的距离信息。
这个第一性原理,马斯克在多个场合宣扬了很多遍,不过,原理归原理,落地归落地,在特斯拉跑通这种技术路线之前,资源有限的国内车企保持怀疑是合理的。所幸,自动驾驶量产王者、行业标杆特斯拉率先攻坚,验证了第一性原理,把目光投向国内,自动驾驶行业先驱百度(极越)通过国内首个纯视觉占用网络OCC再次确认了这条技术路线。有了两个行业领头羊的背书,小鹏汽车毋庸置疑地也要跟进纯视觉方案实现占用网络。
去掉激光雷达,转向纯视觉,可以实现智驾传感器系统成本减半。不过,为了实现智能驾驶系统总成本减半,小鹏汽车的XNGP方案还需要减掉一颗英伟达Orin芯片。据有关报道,一颗Orin-X的价格在500美金左右,是一笔不可忽视的成本大项。
迈向端到端,算力芯片降本
进入2024年,国内车企自动驾驶的技术路线再次迎来重要转变。头部智驾车企小鹏汽车在名为“小鹏真智驾 全国都好用”的新春启动发布会上立了一个Flag:端到端大模型即将量产上车。
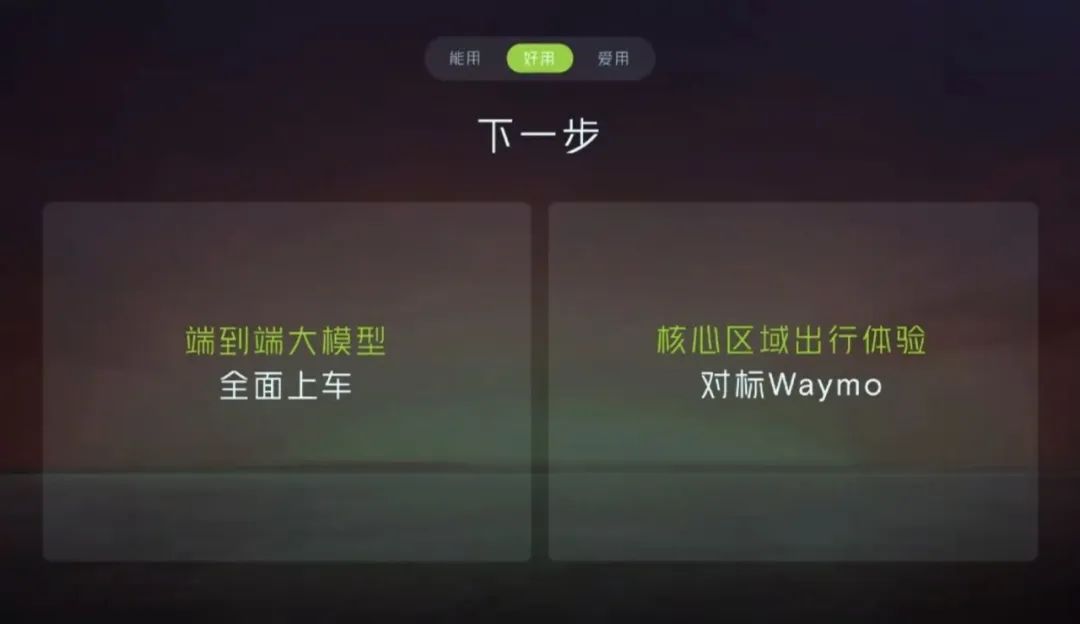
图片来源:小鹏汽车
据有关媒体报道,不只是小鹏汽车,蔚来汽车和理想汽车也在进行端到端方案的预研。大家一股脑地转向端到端,大概有三个方面的原因:一是特斯拉充当排头兵,率先跑通了这条技术路线;二是因为这种技术路线的性能在理论上确实具有更高的天花板;第三个原因则与本文息息相关,端到端可以整合多个小模型,通过Backbone的共享,降低计算开销,实现算力的节约。
对小鹏汽车来说,只有切实降低高阶智驾算法的算力需求,才能砍掉一颗Orin芯片,现在,摆在面前的一个好答案显然就是端到端。
在更早之前,它就已经将感知系统由原来人工编码和神经网络相结合的形式转向了全栈神经网络。
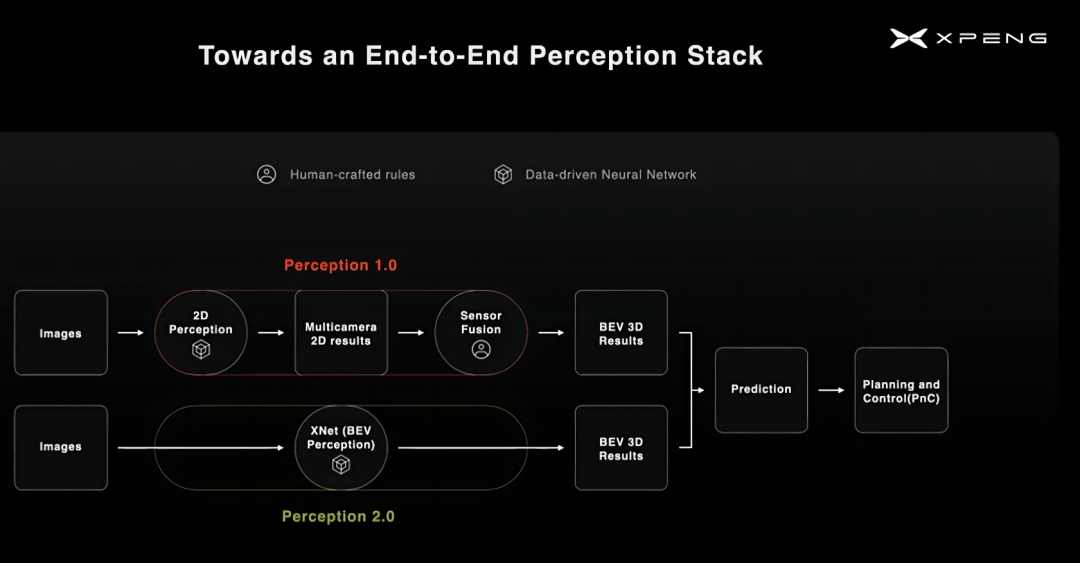
图片来源:小鹏汽车
端到端的技术特点是感知定位、决策规划和控制模块的神经网络化和全链路化,仅仅实现了端到端感知的方案当然不是完整的端到端。事实上,在2023年10月份,小鹏汽车宣布过将规划与控制系统神经网络化的消息。

图片来源:小鹏汽车
草蛇灰线,伏脉千里,一切的一切都说明,小鹏汽车转向端到端并非心血来潮,在对外公开消息之前,就已经布局了相当长一段时间。
从过去几年特斯拉在自动驾驶技术路线上领先国内头部车企的时长来看,特斯拉的BEV、占用网络和城区NOA领先国内头部车企大概一年多的时间,2023年8月份,特斯拉正式对外公开端到端FSD,所以,今年第三季度小鹏汽车落地端到端大模型是一个比较合理的时间。
写在最后
在过去一年的时间里,小鹏汽车不仅透露了高阶智驾系统降本的决心,还通过一些技术分享,在一定程度上揭开了降本的途径和方法。所以,暂且不谈10-15万价格区间内的消费者对高阶智驾是不是感冒,也不谈小鹏汽车的这个“新物种”会给市场带来多大的冲击,至少这一次,小鹏汽车大概率不是在吹牛皮。
不相信也可以,反正到预计上市交付的第三季度也只有不到半年的时间了,且让子弹再飞一会儿!