电动汽车制动力分配策略的研究,无外乎在考虑ECE制动法规、电机峰值转矩限制以及电池充放电特性的条件下,对前后轴制动力分配策略理论进行改善。本文研究的是四轮驱动的电动汽车,搭建基于Simulink的纯电动汽车再生制动模型。
1、理想制动力分配控制策略
理想制动力分配控制策略,其字面意思就是按照理想制动力分配曲线(即I曲线)来分配汽车的前后轴制动力。传统汽车前后轴的制动力分配是一个固定值,即制动力分配系数为定值,但对于加入电机制动的电动车,这里则是实时按照I 曲线来确定制动力分配系数的值。
电动汽车应用这种制动力分配的控制策略最大的优点则是可以充分利用地面附着力,并且在制动过程中也能保证很好的制动效能,保证制动时行车的安全。其次,我们在保证制动效能的同时,通过电机的制动力,也能在很大程度上提高制动能量的回收。在电动车,若后轴要求的总制动力小于电机能够提供的制动力时,则只对后轴进行电机制动,而前轴的机械制动力则会按照I 曲线来分配,若后轴要求的总制动力大于电机能够提供的制动力时,首先保证电机制动力为最大,然后分配后轴机械制动力,最后分配前轴机械制动力。这样保证制动能量被更多的回收,应充分的发挥电机的制动作用。
此控制策略优点很明显,但由于需要实时根据车速、SOC、制动强度Z等信号来改变分制动力分配系数,策略较复杂,综合考虑,工程上难以实际运用。
2、最大化能量回收控制策略
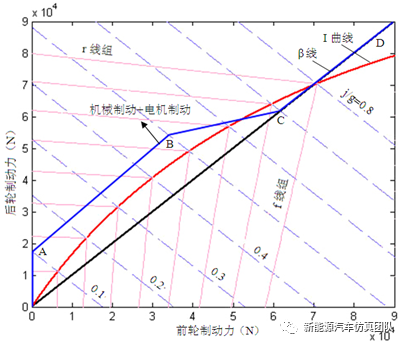
汽车在ECE法规要求下,为保证制动时方向的稳定性和有足够的制动效能,前轴利用附着系数曲线则应始终在后轴利用附着系数曲线的上方,按照此要求,得到ECE法规曲线。基于理想制动力分配曲线(I曲线)、横轴、f线以及ECE法规曲线所围成的区间,在区间内取合适的点,然后将电机制动的比例控制到最大化,尽可能来利用电机制动力,以保证制动能量回收率达到最大。
当电机制动力大于ECE法规的允许制动力,电机制动力取ECE法规规定的最大值,如果电机制动力大于理想配曲线规定的制动力,但小于ECE 法规的允许制动力,电机制动力取实际输出的最大值。如果电机制动力小于理想曲线规定的制动力,则启动机械制动进行弥补,前后轴的制动力满足理想分配曲线,如果电机制动力超过了ECE分配线或者前轮抱死的曲线,即超过了制动系统允许的最大制动力,则应将电机制动力控制在其允许的最大值。
这种控制策略之下需要同时控制制动器和电机的运转,控制复杂,系统响应慢,很难实现。
3、并联分配控制策略
并联制动系统包括机械制动和电机制动,它是在传统机械制动系统下,在驱动轴中加入一套电机制动系统。而在整个的制动过程中,电动汽车前后轴的总制动力也始终按照固定的制动力分配系数来分配。同时、平行地产生制动力是这种制动力控制策略最大的不同。
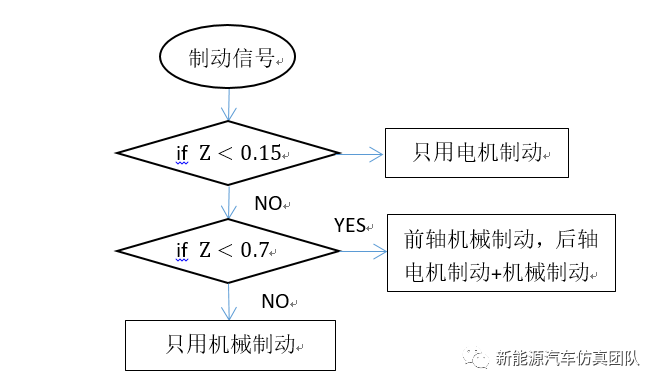
总的来说,由于并联制动系统只需要在原来的机械系统中加入一套电机制动系统,所以,对比前面两种策略,并联制动系统在控制系统上较简单且更容易实现,而且,原来机械系统的保留,也使制动时车辆的安全性得以保证。当制动减速度要求比较小,小于一个给定的值,如a/g=0.15时,制动系统将执行电机制动,当制动时减速度较大时,如a/g>0.7时,为保证电动汽车在制动过程的安全性和稳定性,此时只执行机械制动,而当0.15
下图所示为并联分配策略的流程图。然而,这种控制策略美中不足的是对于制动能量回收的利用率并不高,还有待于进一步提高。
4、基于Simulink的纯电动汽车再生制动模型
在Matlab/Simulink中建立纯电动汽车的整车模型。
4.1、车身模型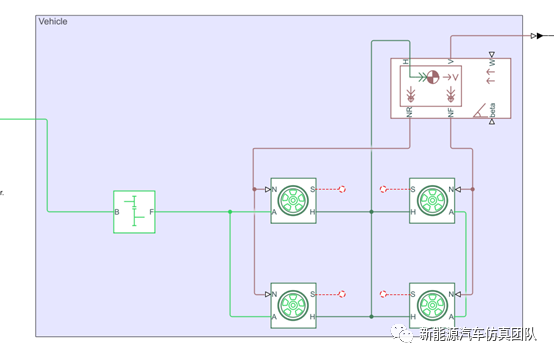
整车参数设置: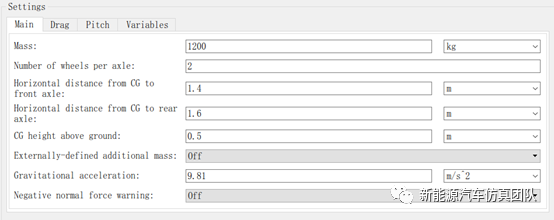
该模块考虑了车身质量、空气动力阻力、道路坡度以及由于加速度和道路轮廓而导致的车轴之间的重量分布。车辆的每个轴上可以有相同或不同数量的车轮。可选包括俯仰和悬架动力学或附加可变质量和惯性。车辆不能相对于地面垂直移动。
4.2、轮胎模型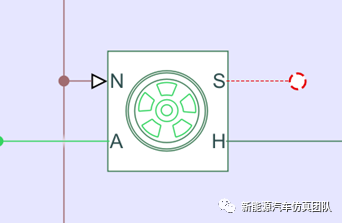
轮胎模型表示以轮胎魔术公式为特征的公路轮胎的纵向行为。该模块由轮胎-道路交互(魔术公式)和SimscapeFoundation Library Wheel和Axle模块构建而成。包括轮胎惯性、刚度和阻尼的影响。
4.3、电机控制器模型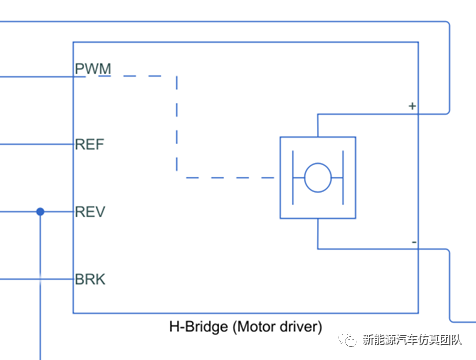
该模块可以在PWM或平均模式下由受控PWM电压模块驱动。在PWM模式下,如果PWM端口电压高于使能阈值电压,则电机通电。在平均模式下,PWM端口电压除以PWM信号幅度参数定义导通时间与PWM周期的比率。使用此比率和关于负载的假设,模块将平均电压施加到负载,以实现正确的平均负载电流。受控PWM电压和H桥模块的仿真模式参数值必须相同。
控制器参数设置: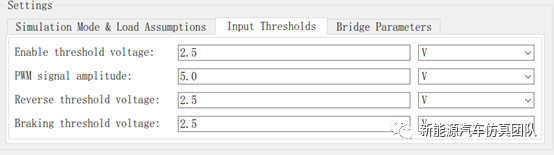

4.4、PWM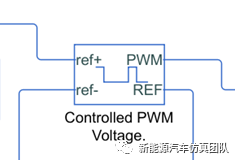
该模块在PWM和REF端口上创建脉宽调制(PWM)电压。脉冲低时输出电压为零,高时等于输出电压幅度参数。占空比由输入值设置。右键单击模块并选择Simscape->Blockchoice以在电气+ref/-ref端口和PS输入u之间切换以指定输入值。
PMW参数设置: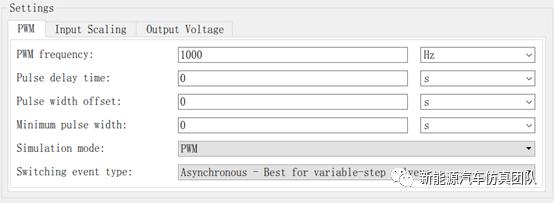
4.5、驾驶员模型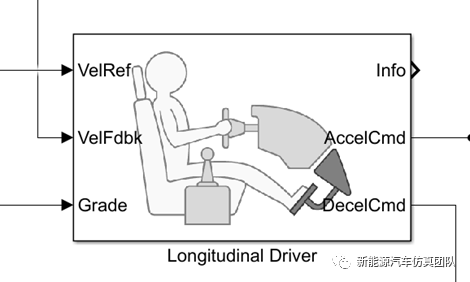
该模块一种参数化纵向速度跟踪控制器,用于基于参考和反馈速度生成标准化的加速和制动指令。
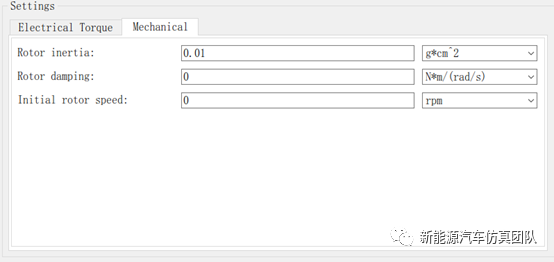
4.6、电机模型
该模块表示直流电机的电气和扭矩特性。
该模块假设没有电磁能损失,因此反电动势和扭矩常数在采用SI单位时具有相同的数值。电机参数可以直接指定,也可以从空载速度和转矩中导出。如果没有关于电枢电感的信息,则可以将此参数设置为某个小的非零值。
电机参数: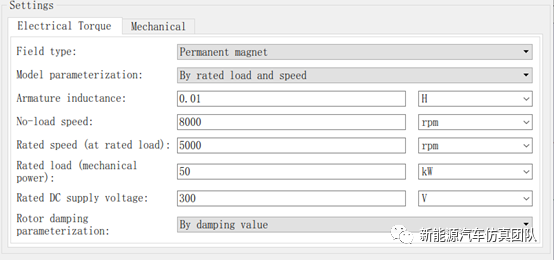
4.7、电池模型
电池模型具体含义,参考上期文章。
电池参数: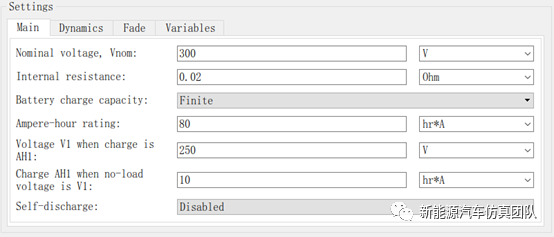
5、仿真
导入工况或速度: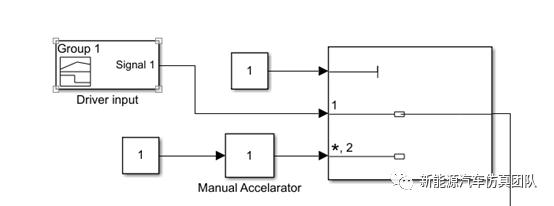
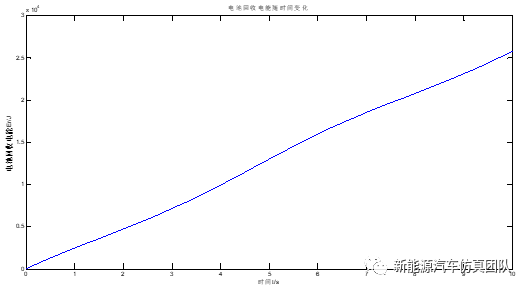
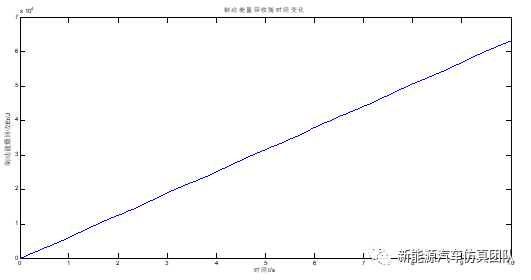
本文分别在的三种不同模式下v=40km/h、z=0.1,v=60km/h、z=0.5,v=80km/h、z=0.72仿真得出电池SOC值随时间变化以及电池实际充电功率对时间的累积即电池回收的有效能量。
初始速度v=40km/h,z=0.1,初始SOC为0.5,其仿真结果如下图所示: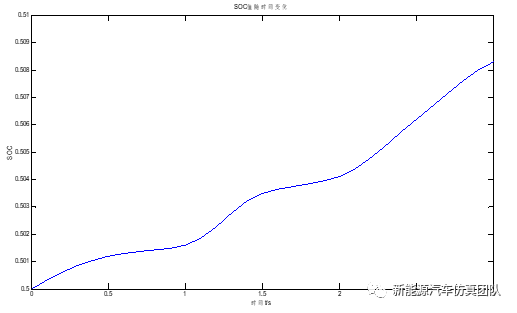
初始速度v=60km/h,z=0.5,初始SOC为0.5,其仿真结果如下图所示: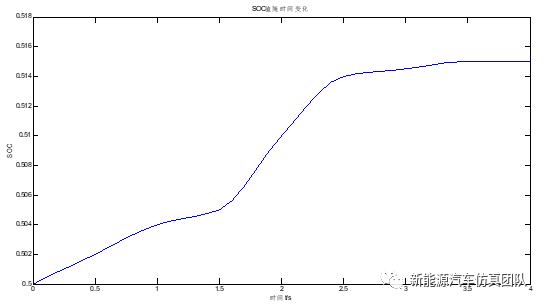
SOC和制动能量回收率都可以用来评价制动能量。本文通过此策略的仿真分析,观察制动时SOC随时间的变化值以及电池实际功率情况,从而验证优化制动力分配策略的可行性。在理想的状态,仿真得出不同模式下SOC变化和制动能量回收率。并验证了模型的有效性。