车联网发展介绍
智能驾驶
指汽车通过搭载先进的传感器、控制器、执行器、通讯模块等设备,实现协助驾驶员对车辆的操控,甚至完全代替驾驶员实现无人驾驶功能。这一技术通过人工智能、视觉计算、雷达、监控装置和全球定位系统等协同合作,让电脑在没有人的主动操作下,能够自动安全地操控机动车辆。智能驾驶技术主要包括网络导航、自动驾驶和人工干预三个部分。
自动驾驶共分为六个等级(L0-L5),其中L5是完全自动驾驶,从L0到L5车辆的自动化逐步提高。

图1 自动驾驶等级划分
车路云协同
-
车路协同
车载通信技术(Vehicle-to-Everything,V2X)是车与外界进行信息交换的一种通信方式,可全方位实施车车(V2V)、车人(V2P)、车路(V2I)等动态实时信息交互,并在全时空动态交通信息采集与融合的基础上开展车辆主动安全控制和道路协同管理,充分实现人车路的有效协同,保证交通安全,提高通行效率,从而形成的安全、高效和环保的道路交通系统。
-
车路云协同
指通过车辆及其他交通参与者、路侧基础设施、云控平台、相关支撑平台、通信网等组成的一个复杂大系统。这个系统能够实现车辆与车辆、车辆与路侧、车辆与云端的信息交互和协同,从而提高整个交通系统的感知、决策和执行能力。
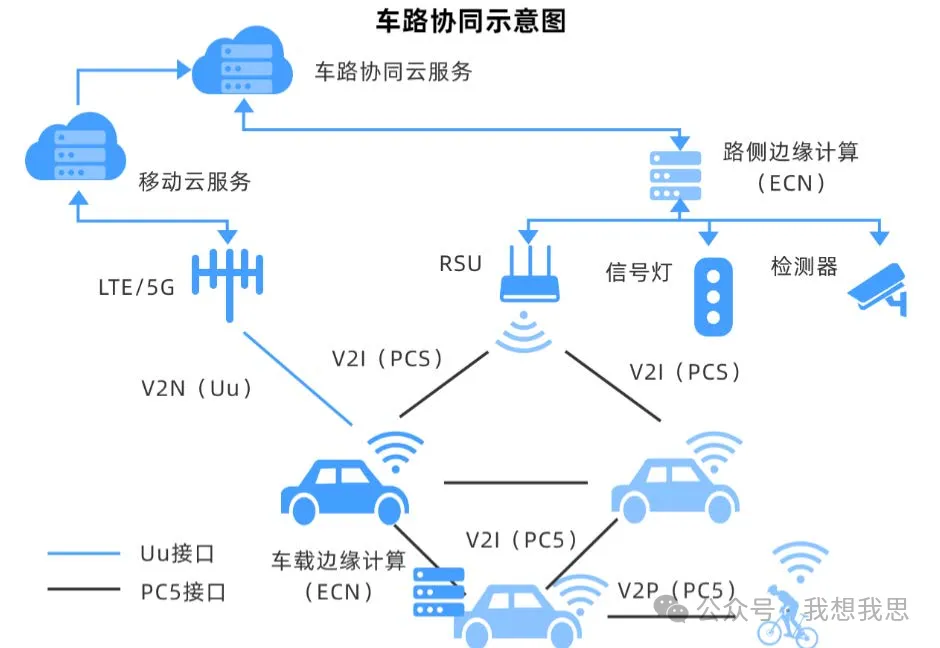
图2 车路云协同示意图
-
单车智能vs车路云协同
车路云协同和单车智能并非相互对立的概念。相反,随着车路云协同技术的出现,给自动驾驶的落地提供了另一种可能。车路云协同将车与车、车与人、车与路等交通参与者的信息进行互动,将车辆由交通个体,整合为整个交通的一环,从而优化交通系统,车路云协同可以从路侧端出发,解决单车智能的一些问题,弥补一些短板。
弥补感知限制:单车智能在感知系统上有诸多局限,例如其受车端传感器安装位置、探测距离、视场角、数据吞吐、标定精度、时间同步等限制,车辆在繁忙路口、恶劣天气、小物体感知识别、信号灯识别、逆光等环境条件中行驶时,难以彻底解决准确感知识别和高精度定位问题。而车路协同可以做到超视距的感知,通过利用路边单元通过传感器将车辆感知不到的道路信息准确地传给车辆,为车辆抹去很多探测死角。
提升自驾能力:车路协同可以为单车智能提供新的以高维数据为代表的智能要素,可以有效分担车载自动驾驶系统的感知、决策和控制压力,降低系统的复杂度。随着车路协同技术与L3/L4等更高阶的自动驾驶技术相融合,可以提供更多的驾驶引导。随着5G技术的发展和应用,车路协同的即时性和可靠性将大大提升,并拓展更多发展空间,如前方事故预警、前方事故视频实况直播、路面散落物提醒,前方危险异常车辆提醒等功能。
降低成本:随着自动驾驶的进阶,从L3级向上,要保证系统的安全可靠,在自动驾驶汽车的感知、算力上的投入将大幅度增长,需要对硬件设备不断进行升级和增加。以车载传感器为例,激光雷达价格昂贵,尤其是用于远距离、大范围探测的L4/L5级别自动驾驶主雷达。而受限于成本、零部件开发时间以及车端有限的空间,硬件设备不可能无止境升级和增加。此时,通过车路协同技术,在道路端的补充对于降低单车成本将起到十分重要的作用。
车联网技术
我国车联网起步于2009年,经历了起步阶段(支持远程通话)、手机互联网阶段(与汽车共享手机应用)、汽车IVI阶段(车载娱乐,围绕中控屏展开)、5G+V2X阶段,未来随着5G与V2X技术的发展成熟,车联网产业将打开成长空间。
如今,车联网的跨界融合体系已初具规模,通过获取路侧交通信息在车端进行融合、计算、决策,进而提供辅助驾驶或者有条件下的自动驾驶。
车联网的未来发展将会进入智慧出行阶段,在5G技术辅助下,车联网通过车路传感器信息交互,实现车路进行动态分布式协同计算的全路网的自动驾驶。
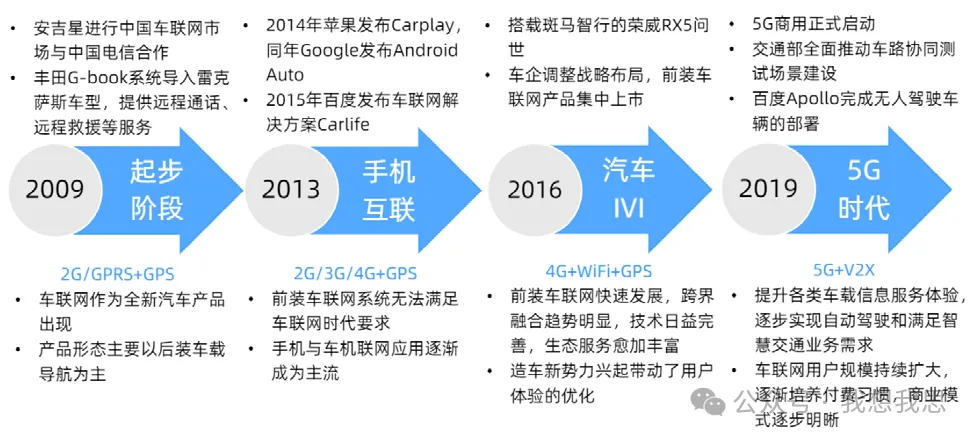
图3 车联网发展历程

图4 5G+V2X车联网示意图
应用场景
目前C-V2X得到中国、美国两个交通大国的认可,成为全球车联网的唯一标准。
C-V2X 的应用场景可划分为交通安全类、交通效率类以及信息服务类。在基础业务场景阶段,大部分应用的实现都基于车辆、道路设施等参与者之间的实时状态共享。在利用 C-V2X 信息交互实现状态共享的基础上,再自主进行决策或辅助。


图5 C-V2X基础业务场景
随着基础业务场景的逐步推广和应用落地,C-V2X 下一阶段的增强业务场景在保证驾驶安全的基础上,对于效率出行的业务将逐渐增加。业务的融合与精细化、智能化演进对增强的 C-V2X 车联网系统以及应用层消息交互都提出了新的要求。
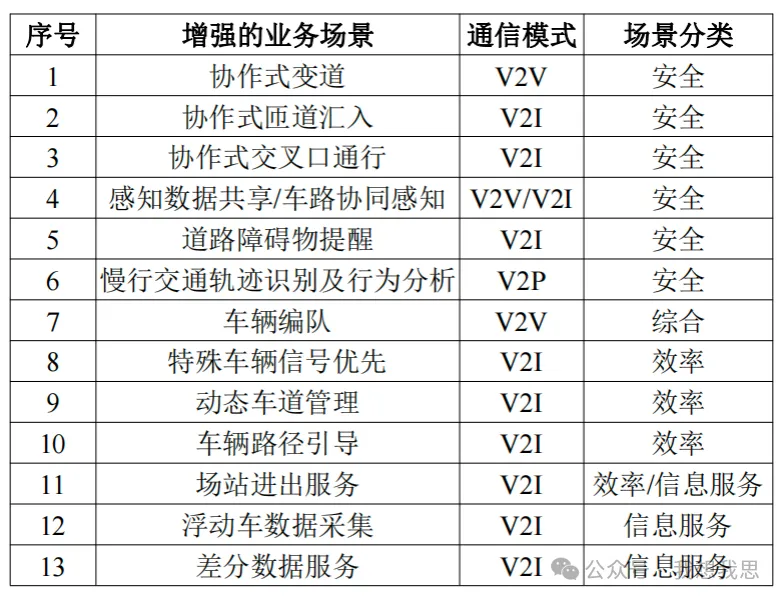
图6 C-V2X增强业务场景
我国C-V2X车联网产业生态已成熟,逐渐形成了包括通信芯片、通信模组、车载终端(OBU)、路侧设备(RSU),测试仪表、整车制造、测试认证、高精度定位及地图、安全等的多厂家供货环境。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。