历史不成熟的经验表明:技术路线的收敛,往往是新技术大规模落地的标志。按照这种经验审视自动驾驶技术,会遗憾地得出自动驾驶落地还遥遥无期的悲观结论,毕竟自动驾驶一是不缺自信、二不缺技术路线之争。
技术路线之争往大了看有单车智能和车路协同之争、有纯视觉和多传感器融合之争、有依赖高精地图和不依赖高精地图之争……,往小了看有激光雷达布置位置之争、有行泊一体和分立之争……
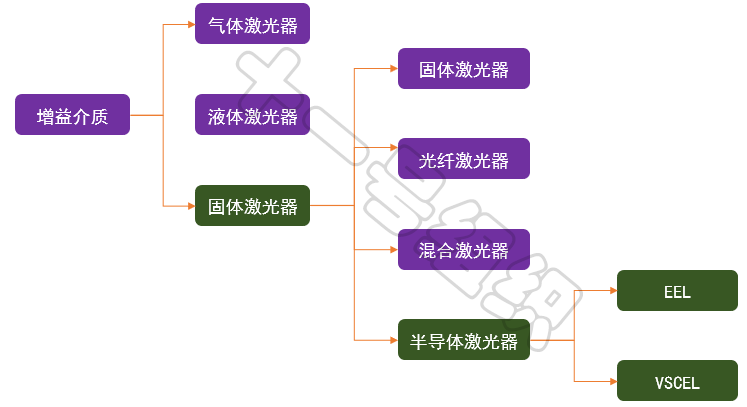
在所有技术路线之争中,如果要挑一个我心中最有意思和最热闹的,非激光雷达莫属,不信你看:(1)测距方法有飞行时间(Time of Fly,ToF)法和调频连续波(Frequency Modulated Continuous Wave,FMCW)法之争;(2)激光器有边缘发射激光器(Edge Emitting Laser,EEL)和垂直腔面发射激光器(Vertical Cavity Surface Emitting Laser,VSCEL)之争;(4)探测器有雪崩光电二极管(Avalanche photodiode,APD)、单光子雪崩二极管(Single photon avalanche diode,SPAD)、硅光电二极管(Silicon photomultipliers, SiPMs)之争;(5)扫描模块有机械式、混合固态、固态之争;混合固态又有棱镜、转镜和微机电系统(Micro-Electro-Mechanical System,MEMS)微振镜之争,固态有光学相控阵(Optical Phased Array,OPA)和Flash之争。如果单纯地将不同技术路线进行排列组合,理论上可以有上百种组合,如图1所示,这也意味着将有上百种类型激光雷达。
图1 激光雷达纷繁复杂的技术路线组合
但很明显,图1中不是所有连线都具有可行性。而本系列科普文章,就是想讲明白哪些技术路线不合理,哪些技术路线是已经被淘汰,哪些技术路线正在被广泛使用,哪些技术路线是未来的发展方向。在大规模枯燥的科普知识之前,第一篇就让我们从紧张刺激而又跌宕起伏的激光雷达发展历史讲起。早在二十世纪六十年代,休斯实验室的Maiman和Lamb就研制出了可以发出694.3nm红色激光的红宝石激光器,这是公认的世界上第一台激光器。为什么叫红宝石呢,因为该激光器的工作物质就是掺有铬和铝的红宝石。此后随着激光技术的发展,使用激光进行探测的激光雷达也得到发展,不过那时还主要用于科研领域,比如用于气象探测,比如用于对海洋、森林、地表的地形测绘,和一般人还没什么交集。到了二十世纪八十年代,激光雷达引入了扫描结构,视场角增大之后也让其在部分商用领域找到了立足之地,比如工业测量,著名的Sick(西克)及 Hokuyo(北洋)公司针对此领域推出的扫描式2D激光雷达便是其中的优秀代表。 2000年以后,激光雷达由单线扫描又进化到多线扫描,并逐渐在环境三维高精度重建应用上展露出一些优势。2004年,这是激光雷达种子在自动驾驶领域种下的年份,美国第一届无人车挑战赛在“别人恐惧我贪婪”的DARPA资助下如期举行,参赛队伍里有一家名叫Velodyne的公司,这是一个生产音响设备的公司,创始人为David Hall博士。据说Velodyne参加比赛是为了推销自家的音响产品,不信你看它的队名DAD(Digital Audio Drive,数字音频驱动),不看解释我还以为他叫“爹地队”,是我肤浅了。Veloyne参加比赛的车辆是一辆被改装了的带有全景摄像头的皮卡,如图2所示。
图2 Velodyne参加无人车挑战赛的团队合影
Velodyne虽然最后没有完成比赛,但David Hall博士在比赛中发现了一个新奇的玩意:单线激光雷达,得知这个玩意的工作原理之后,David Hall博士随机感受到这玩意的巨大魅力,同时也看到了单线激光雷达的局限性,比完赛回来之后马不停蹄地就投入到激光雷达的研究中。2005年,第二届无人车挑战赛上,Velodyne在参赛车辆上装了一个自家发明的360°多线束旋转式激光雷达,这台激光雷达直径达30英寸,重达100磅,实实在在的一个大家伙,“花盆”的外号也因此由来。虽然依旧没有完成比赛,但这颗车顶的激光雷达引起了其他队伍的浓厚兴趣。比赛之后,Velodyne继续与这些参赛队伍保持联系,并基于这些需求不断优化自己的激光雷达产品。2007年,第三届无人车挑战赛移步城市举行,Velodyne虽然没有参加比赛,但是在7支跑完了全程的队伍中,有6支搭载了Velodyne的64线束激光雷达HDL-64,Velodyne激光雷达自此一战成名。比赛结束后,版权保护意思强烈的David Hall博士随即将这项新发明申请了专利,并授权给了Velodyne公司,专利号为US7969558(High definition LiDAR System),业内称为“558专利”。2011年6月,该专利又获得美国专利审判和上诉委员会(Patent Trial and Appeal Board,PTAB)的授权,这意味着“558专利”成为机械旋转式激光雷达的基础专利,成为其他研发机械旋转式激光雷达绕不过去的坎,这也成为后续众多江湖恩怨的起源。继续回到DARPA资助的无人车挑战赛上,当时低调亮相的另外一家激光雷达鼻祖便是Ibeo。1998年成立的Ibeo,2年后被SICK收购。第三届DARPA资助的无人车挑战赛上,Ibeo都有给部分参赛队伍提供单线扫描式激光雷达。尤其是在2005年第二届无人车挑战赛上,斯坦福团队通过在感知方案中加入5个Ibeo激光雷达,成功在那一年的挑战赛中脱颖而出,参赛车辆如图3所示。我有点理解Velodyne的David Hall博士为什么要做多线激光雷达了,5个单线激光雷达并排放着确实有点壮观。
图3 Ibeo单线激光雷达的斯坦福团队参赛车辆
这一年,Ibeo从SICK重新获得独立运营权,好运也随之到来。2010年,获得了法雷奥的青睐,双方将合作共同为奥迪L3自动驾驶项目开发车载激光雷达,项目总额达到10亿美金。这一年,Velodyne推出64线旋转式激光雷达的改进版HDL-64E,随着投入到无人驾驶领域研究的公司越来越多,HDL-64E可谓一机难求,遍寻宇宙无敌手,8万美金一颗的价值就正面说明了市场的火爆,图4为搭载在Voyage车上的HDL-64E。
图4 搭载在Voyage车上的HDL-64E
2009年之后,Velodyne在自动驾驶领域叱咤风云、为虎作伥,Ibeo在乘用车前装量产领域呕心沥血、潜心打磨。经过7年研发和量产打磨,2017年,其为奥迪A8打造的全球第一款车规级激光雷达SCALA量产交付,该款4线激光雷达扫描系统采用一维转镜方案,水平视场角达到了145°,测距达到了150m,图5为搭载SCALA奥迪A8。本以为这将是Ibeo的腾飞时刻,未曾想,奥迪临门刹车,叫停了带L3自动驾驶功能的A8量产。
图5 搭载SCALA的奥迪A8
虽然遭受了客户奥迪的爽约,合作伙伴法雷奥的移情别恋,Ibeo非但没有就此沉沦,反而极大激发了自己的斗志,特别是在采埃孚入股Ibeo之后,更是开足马力投入了固态激光雷达的研发中,以期证明自己,这种对技术的执着实在是令人钦佩。这种执着在2019年换来了回报,前脚刚一口气发布了短、中、长距三款纯固态激光雷达产品ibeoNEXT,后脚就被东方大国神秘的客户长城汽车看中,随机宣布与其达成战略合作,ibeoNEXT将搭载在长城魏牌系列车型,并定于2021年投产。ibeoNEXT长距产品采用885nm波长激光器,拥有11.2°x5.6°的视场角,140m的探测能力。这个参数属实有点尴尬,目前主机厂对主激光雷达的视场角要求一般是120°x25°,所以要用ibeoNEXT长距款作为主激光,需要11个拼起来……,造型上得有多丑,造型设计部门得有多头大。难怪有业内专家说:落地是不可能的,只是一个噱头。所以这个合作的结局早已注定,只是没想到这么悲壮。计划搭载IbeoNEXT的长城魏牌摩卡车型经历了延迟、延迟、再延迟……。2022年8月,成都车展上,长城魏牌终于官宣了旗下首款激光雷达车型:摩卡DHT-PHEV激光雷达版,但为其站台的激光雷达厂商却不是Ibeo,而换成了速腾聚创。2022年9月,我们也没有等来ibeoNEXT量产的喜讯,却等来Ibeo破产的消息。一代激光雷达佳人消香玉损,世人在评价她时,总是指责其在技术上步子卖的太大,融资和客户上又不够用心。但我总觉得这符合西方创业公司的传统,认准一项技术,死磕,垄断世界、惊艳世人。 Ibeo只是破产,又不是原地毁灭,这个时候说不定哪家公司正在继承Ibeo的衣钵,正在潜心研究固态激光雷达,以期一鸣惊人。2009年之后,自动驾驶赛道的火热将Velodyne推上激光雷达铁王座,虽然8万美金一颗、虽然售后服务几近于无,虽然供货周期漫长,但奈何市场别无其他激光雷达可选。2016年,为了能够享受到优先提货权,福特和百度更是向Velodyne激光雷达公司联合投资了1.5亿美元。时人常戏称:能有多少自动驾驶车辆上路,就看Velodyne能生产多少激光雷达。这种躺赢的局面持续到了2017年,如果从2007年第三届无人车挑战赛算起,整整躺赢了10年。后面的故事大家就比较熟悉一点,以禾赛科技和速腾聚创为首的国内激光雷达厂商开始入局,其产品以极高的性价比、贴心的售后服务及极友善的交付周期迅速圈粉无数。2019年8月,感受到国内厂商威胁的Velodyne祭起了大杀器“558专利”,在美国加州起诉了禾赛科技和速腾聚创两家中国公司侵权。刚发起专利诉讼没多久,2019年底,想要将主要精力放在欧美市场的Veodyne突然决定不直接在中国市场销售激光雷达,而是通过代理模式发展,同时裁掉了大部分在中国的工作人员。未曾想,战略放弃的中国市场在两年后成为激光雷达最核心的战场。2020年6月和9月,禾赛科技和速腾聚创先后跟Velodyne达成了和解,并签署了专利许可协议。两家公司同意向Velodyne支付和解费用,包括一次性的专利许可补偿及后续按年支付的专利许可使用费。之后的两年,用内忧外患形容Velodyne毫不为过,曾经引以为傲的机械式激光雷达市场迅速缩水,2020年推出的混合固态激光雷达又没激起水花。覆巢之下安有完卵,2021年,David Hall博士和其妻子因“表现不当且缺乏诚信”被罢免职务。终局就是2023年开年,Velodyne宣布与Ouster公司合并,合并后公司仍以Ouster命名,股票代码也是OUST,一代激光雷达巨头,真的是挥一挥衣袖,不带走一个名字。在激光雷达的发展史上,还有许多发挥重要作用的人物和公司,在此我们就不展开叙述,只是通过Velodyne和Ibeo两家公司波澜壮阔的发展历史来回顾激光雷达的青葱岁月。在激光雷达名称的四个字中,激光占据了一半的分量,这足以说明其“家庭地位”。
究竟什么是激光、发射激光的激光器有哪些类型,激光器有哪些重要的参数,本文期望能够说清一二。
一、激光的诞生
激光Laser的英文全称为Light Amplification by Stimulated Emission of Radiation,直译过来就是受激辐射光放大,听起来有点别扭,但其实精确表达了激光产生的原理,而要讲清这个原理,就不得不从物资原子结构聊起。19世纪末,科学家通过一系列粒子撞击试验后发现:原子是由原子核和绕核运动的电子组成,电子围绕原子核不停地旋转,同时原子核也不停地自转,原子核内部还可以细分为质子和中子,原子内部结构如图6所示。
图6 原子内部结构
1913年,年仅28岁的丹麦物理学家波尔(Niels Bohr)在借鉴了普朗克(Max Planck)的量子理论基础上提出了全新的原子结构模型,其基本假设主要包括:(1)定态假设:电子在原子核库仑力作用下,只会在一些分立的特定圆形轨道运动,且不向外辐射光子,处于稳定的状态,这种状态被称为定态。注:光子(Photon)是一种基本粒子,是电磁辐射的量子,其静止质量为零,不带电荷,其能量E为普朗克常h和电磁辐射频率f的乘积:E=hf,在真空中以光速运行。(2)轨道假设:电子在不同的轨道上运动,能量是不同的,能量相对较高的为高能态,相对较低的为低能态。当电子处于离核最近的轨道上时,能量最低,称为基态,当电子处于其他轨道上时,都比基态能量高,称为激发态。(3)跃迁假设:在不同定态之间跃迁,会辐射或吸收一定频率的光子,辐射或吸收光子的能量由这两个定态的能量差决定。原子中处于高能态的电子,在没有任何外界光子作用下,有一定概率会自发地从高能态向低能态跃迁,损失的能量会以光子的形式辐射出来,这个过程称之为自发辐射,如图7所示。
图7 自发辐射过程
不同原子自发辐射产生的光子在频率、相位、偏振方向及传播方向上具有随机性。白炽灯的工作原理就是基于自发辐射,通电后白炽灯灯丝中高能态电子数增多,频繁地发生自发辐射产生大量光子。原子中处于低能态的电子,也不是吃素的,随时在观察身边是不是有外来光子经过,一旦有能量恰好等于两个能级之间能量差(E2-E1)的光子出现时,就会启动“吸星大法”,将光子的能量吸收过来,用来将自己提升到高能态,这一过程称为受激吸收,如图8所示。原子中处于高能态的电子,在见到上述外来光子时,也不会无动于衷,并且在辐射场能量够大后,自己将向低能态跃迁并辐射出一个和外来光子具有相同频率、相位、偏振方向及传播方向的光子,听起来有点像私奔,这个过程称之为受激辐射,如图9所示。这样,通过一次受激辐射,一个光子变为两个相同的光子,这意味着光被放大了。到此为止,激光的直译解释中(受激辐射光放大)七个字已经悉数有序登场,但此时的光还不能称为激光。首先,自然条件下,原子中处于高能态的电子数目总是比低能态的电子数目少,所以外来光子经过,你很难保证是被低能态电子吸收发生受激吸收,还是被高能态电子看上,发生受激辐射。如果想要原子内部产生更多的受激辐射过程,就需要外界提供能量打破热平衡,从而使高能态和低能态电子数出现反转。为了实现这个过程,一是需要采用容易发生高低能态电子数反转现象的工作物质,这种物质被称为增益介质。二是需要对增益介质进行激励并提供让增益介质不断发生粒子数反转的能量源,被称为泵浦源。增益介质在泵浦源的激励下,发生粒子数反转,这是激光产生的前提条件。其次,处于高能态电子也会发生自发辐射,更何况之前已经通过泵浦源人为的将低能态电子拉升到了高能态,这种自发辐射过程在没有人为干预情况下会更加强烈,因此我们要想办法让受激辐射远大于自发辐射,说白了就是要让增益大于损耗。办法之一就是在增益介质前后两端加上两个反射镜,其中一端是全反射镜,另一端是部分反射镜,这一结构被称为谐振腔。当受激辐射发生后,方向合适的光子会在两个反射镜之间反复横跳,多次经过增益介质,使增益介质内部反复产生受激辐射,如图10所示。当光束放大到可以穿透部分反射镜的阈值时,会从部分反射镜中透射出来,形成激光束。由于两面反射镜位于特定的方向,对于方向不合适的受激辐射光会被滤除。同时两镜面之间的距离也对输出的激光波长有着选择作用,只有在两镜间的距离能产生共振的波长才能产生激光。因此我们看到穿透部分反射镜的激光束波长一致、方向一致、波束极窄,这也是谐振腔筛选的结果。增益介质、泵浦源和谐振腔是激光诞生所需要的主要光学系统,如果再辅以电源系统、控制系统和机械机构等,就可以组成一个利用受激辐射原理产生激光的完整激光器。增益介质是光子产生的源泉,基于这个维度,激光器可分为气体、液体、固体三种类型,固体类型激光器又可细分为固体、光纤、混合、半导体等类型,如图11所示。应用在汽车领域的激光雷达,以半导体激光器和光纤激光器为主,下文我们对这两类激光器展开介绍。半导体激光器的前缀是半导体,所以要介绍清楚,不得不从半导体最基础的PN结说起。
P型半导体是通过在纯净半导体(不含杂质且无晶格缺陷的半导体)中掺杂特定杂质,让空穴(相当于带正电的粒子)数量增多。N型半导体也是如此操作,只是掺杂的杂质让电子(带负电的粒子)数量增多。空穴和电子被称为载流子。
如果将P型半导体和N型半导体制作在同一块半导体基片(硅或锗)上,一方面由于浓度差,P型区多子(空穴)会向N型区扩散,而N型区多子(电子)会向P型区扩散,形成载流子扩散运动。另一方面,滞留的带电离子(P区失去空穴产生负离子区,N区失去电子产生正离子区)形成的内电场,驱动P(N)型区的少子向低电势移动,形成反向的漂移运动,如图12所示。
当扩散运动和漂移运动所迁移的载流子数目相同时,达到动态平衡,就形成一个PN结。PN结中载流子数量非常少的一个高电阻区域称为耗尽区。
如果给PN结施加一个正向电压(P型区接正极,N型区接负极),正向电压的电场与PN结的自建电场方向相反,它削弱了自建电场对扩散运动的阻碍作用。在外电场作用下,大量电子将被推向N区,其中一部分与空间电荷区正离子附近的空穴复合。大量空穴也会被推向P区,其中一部分与空间电荷区负离子附近的电子复合。载流子复合过程将会发射某种波长的光子,也就是发生了自发辐射。
随着正向电压上升,流经PN结的电流大于一个阈值时,自发辐射产生的光子通过半导体内已激发的电子-空穴对附近时,就能激励二者复合再产生一个新的光子,也就是发生了受激辐射,再加上谐振腔的反射,就能通过受激辐射加速光子的产生,从而产生激光。但是要注意的是,并非所有半导体材料PN结发生载流子复合时都会产生光,有的半导体材料会将部分能量转化为热耗散掉而不产生光,这就会导致发光效率的降低,因此为了提高发光效率,通常使用带隙半导体作为发光材料,例如砷化镓(GaAs)、磷化铟(InP)等。
总结一下:半导体激光器就是指使用半导体材料作为增益介质,采用半导体工艺在半导体材料中构造出大量PN结,在泵浦源的激励下,PN结区域发生载流子复合从而发生受激辐射,受激辐射产生的光子在谐振腔的作用下最终生成一束激光。
半导体激光器使用的泵浦源主要有三种方式:电激励、电子束激励,光激励和碰撞电离激励等。绝大多数半导体激光器采用的是电激励,即给PN结加正向电压,以使在结平面区域产生受激辐射,也就是说是个正向偏置的二极管,因此半导体激光器又称为激光二极管。
半导体激光器具有效率高、体积小、寿命长、低能耗等优点,成为现代激光技术发展的重要基础,具有战略性的发展意义。其根据谐振腔制造工艺的不同可分为边缘发射激光器(Edge Emitting Laser,EEL)和垂直腔面发射激光器(Vertical Cavity Surface Emitting Laser,VCSEL)两种。EEL是在芯片的两侧镀光学膜形成谐振腔,由于谐振腔与衬底(晶圆片)平行,因此EEL沿平行于衬底表面发射激光。
VCSEL是在芯片的上下两面镀光学膜,形成谐振腔,由于谐振腔与衬底垂直,能够实现垂直于芯片表面发射激光。
以VCSEL为例,详细介绍一下半导体激光器内部结构,VCSEL典型结构剖面如图14所示,从上往下依次为P型接触电极、上反射镜、上氧化限制层、有源区、下氧化限制层、下反射镜、衬底及N型接触电极。
有源层通常由3~5个量子阱(一种薄层结构,可以在垂直于薄层表面的方向上限制粒子)组成。有源区的两侧是氧化限制层,一方面起着限制载流子的作用,另一方面起着调节谐振腔长度的作用,使其谐振波长正好是所需要的激光波长。
限制层两侧是上下反射镜,通常采用N型和P型布拉格光栅(N-DBR/P-DBR)作为谐振器反射镜。N-DBR在下方作为全反射镜,反射率接近99.9%。P-DBR在上方作为部分反射镜,反射率也大于99%。
在衬底(N型砷化镓材料)和P-DBR的外表面制作接触电极,形成欧姆接触,并在P-DBR上制成一个圆形光窗口,获得圆形光束,窗口直径从几微米可到百微米量级。
工作时,电流从P型电极注入,通过氧化层注入到有源区,会在有源区形成受激辐射实现激光输出。激光的输出方向垂直于有源区表面,穿过限制层表面,从低反射率的P-DBR反射镜射出,最终稳定输出激光。EEL和VCSEL的主要性能差异体现在功率密度、温漂系数、光束质量、光谱宽度和生产成本等方面,汇总如表1所示。
(a)功率密度。在激光领域,功率密度表示单位时间内,激光辐照在单位面积靶材上的能量大小,单位为W/mm^2。在其他条件相同的情况下,功率密度低意味着从被测物体表面反射回来的入射光功率低,这将导致探测距离短。EEL的光功率密度一般是60000W/mm^2左右,而现在头部厂商生产的五结VCSEL功率密度也只有1500W/mm^2左右,相差一个数量级。
(b)光束发散角。激光器发射出去的激光具有一定的发散角,发散角直接决定激光打到被测物体表面的光斑面积,从而影响了激光打在被测物体上的光功率密度,最终影响从被测物体表面反射回探测器表面的入射光功率。在其他条件相同的条件下,若发散角减小50%,则激光雷达探测距离将提升41%。
VCSEL打在物体上的光斑呈点圆形,远场发散角典型值在20°左右。EEL打在物体上的光斑呈椭圆形,慢轴远场发散角典型值在20°左右,远场发散角典型值在30°左右,因此VCSEL具有相对较小的远场发散角,如图15所示。
这样的发散角大小其实都是不可接受的,都需要准直镜和扩束镜,来减小激光的发散角。(c)光谱宽度。由于滤光片在接收激光时需要过滤掉特定波长(905 nm/1550 nm)以外的光,因此光谱宽度越窄意味着激光的抗干扰性越强,信噪比也就越高。目前VCSEL激光器的光谱宽度在1~2 nm左右,低于EEL的3~8 nm,拥有较强的抗干扰性。
(d)温漂系数。温漂是指激光波长随温度变化发生偏移的现象,偏移过大会导致回波信号被滤光片滤掉,无法被探测器接收到。当然也可以提高滤光片的光谱宽度,但这会导致信噪比减少,抗干扰能力减弱。目前VCSEL的温漂大约是EEL的六分之一。
(e)生产成本。EEL是平行于衬底侧面发光,所以在形成晶圆后还需要进行切割、翻转、镀膜、再切割的工艺步骤,无法按照现有半导体工艺来一次性处理,生产成本较高。VCSEL垂直于衬底正面发光,不需要在侧面进行太多加工,只需要按照正常的半导体加工工艺批量处理即可,成本较低。按照Yole的统计,EEL的后道处理工序成本比VCSEL高了一倍以上。
光纤激光器和半导体激光器一样,都是由能产生光子的增益介质,对增益介质进行激励的泵浦源,使光子谐振放大的光学谐振腔三部分组成。
光纤激光器与半导体激光器的最大不同在于增益介质,半导体激光器使用的增益介质是半导体,而光纤激光器使用的增益介质是光纤。
半导体激光器的发光机理上文已经介绍过,泵浦源常为电激励方式,而光纤不能够直接实现电光转换,因此泵浦源常采用光激励方式,来实现光光转换,光纤激光器最常用的泵瀑源就是半导体激光器。
光纤激光器按照增益介质、谐振腔结构可以细分为很多类型,下面以稀土掺杂类增益介质、光栅反射镜谐振腔为例,介绍光纤激光器的工作原理,如图16所示。泵浦源又被成为“种子源”,通过合束器为光纤激光器提供高功率、高亮度的泵浦光。工作时,泵浦源发出的泵浦光耦合进入增益介质光纤中,泵浦光被吸收,吸收了光子能量的稀土离子发生能级跃迁并实现粒子数反转,反转后的粒子经过谐振腔,由激发态跃迁回基态,释放能量,并形成稳定的激光输出。