脉宽调制(或简称PWM)是一个简单的概念,有许多应用。我们来看一个方波。

波形有一定的频率。波形的频率和周期彼此相反,即频率= 1/周期,周期= 1/频率。1s的周期意味着1Hz的频率。0.1s的周期表示10Hz的频率,10s的周期表示0.1Hz的频率
请注意,该信号完全是数字信号,要么为开/高电平,要么为关/低电平。例如,这不同于正弦波,正弦波是模拟的,在整个波形中平滑过渡(参见我们关于模拟和数字信号的文章)。
还要注意的是,对于方波,信号在一半时间内是开启的,在一半时间内是关闭的。
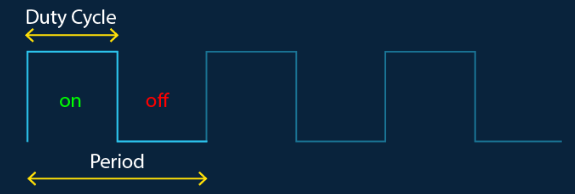
波形的on部分称为占空比——它是信号供电/做功/工作的时间比例。对于方波,这是50%的时间,意味着信号有50%的占空比;即,如果周期为1s(频率为1Hz),则信号将开启0.5s,关闭0.5s
波形的正部分也可以被认为是一个能量脉冲。通过修改脉冲的宽度(占空比),我们可以改变波形中能量的比例。
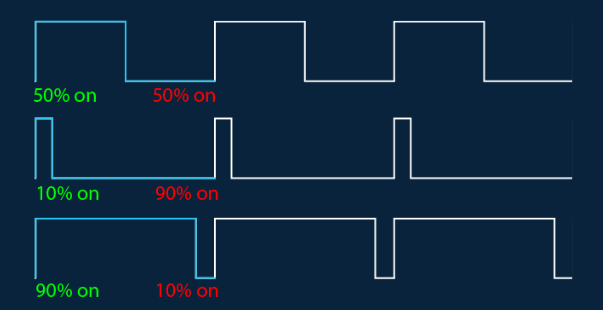
由此而来的术语脉宽调制(修改脉冲的宽度)。
PWM的主要用途
脉宽调制(以下简称为PWM)是数字系统产生模拟输出的一种方式(通过将PWM信号通过一些附加电路和/或机械系统)。PWM的一些应用示例如下:
PWM信号可用于通过低通滤波器产生模拟电压。
PWM可用于按比例控制DC电机的速度。
PWM用于设置某些类型的伺服电机的位置。
PWM可用于控制加热元件产生的热量。
PWM用于降压和升压转换器,将输入电压向下转换为较低电压或向上转换为较高电压(参见我们的巴克和升压转换器文章)。
PWM可用于控制灯泡或LED的[表观]亮度。
。。.还有很多很多。
在某些情况下,输出是电压或电流,在其他情况下,它是物理量,如力/位置/热量/亮度,但在所有情况下,通过使用PWM,输出可以在完全打开的最大值和完全关闭的最小值之间平滑缩放。
PWM到模拟信号
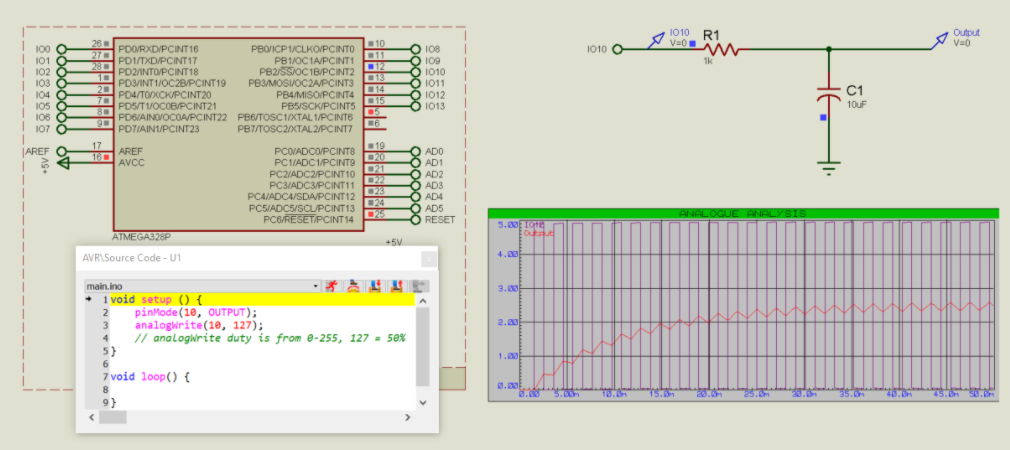
让我们看看将PWM信号转换为模拟电压的情况。为此,我们需要一个低通滤波器(参见我们的过滤文章)。
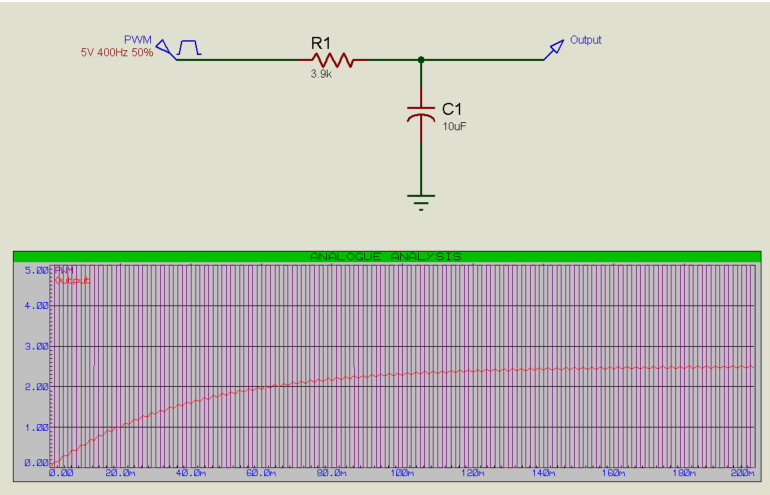
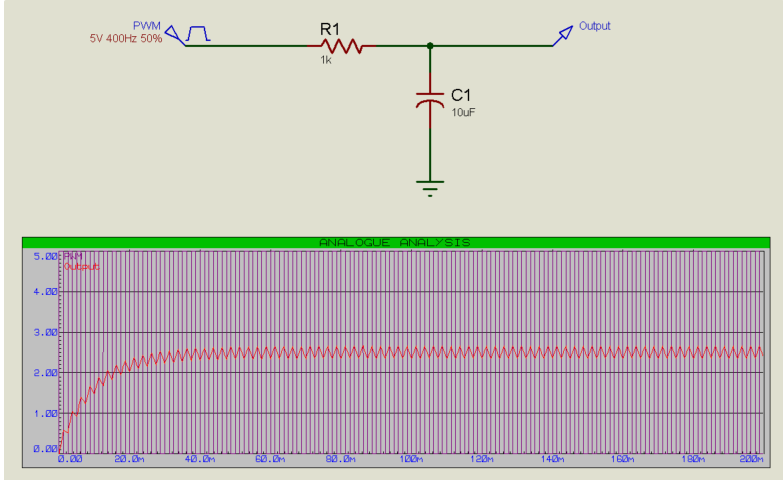
5V数字PWM转换为2.5V模拟输出(5V的50% = 2.5V)。
R(电阻)或C(电容)值越小,对输入变化的响应越快,但输出抖动越大(反之亦然)。
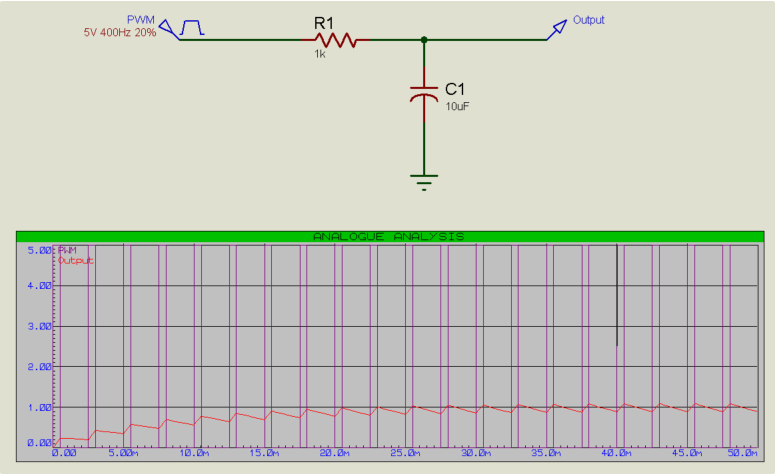
改变占空比会改变输出电压。例如,20%的占空比将产生1V的输出(5V的5V = 1V):
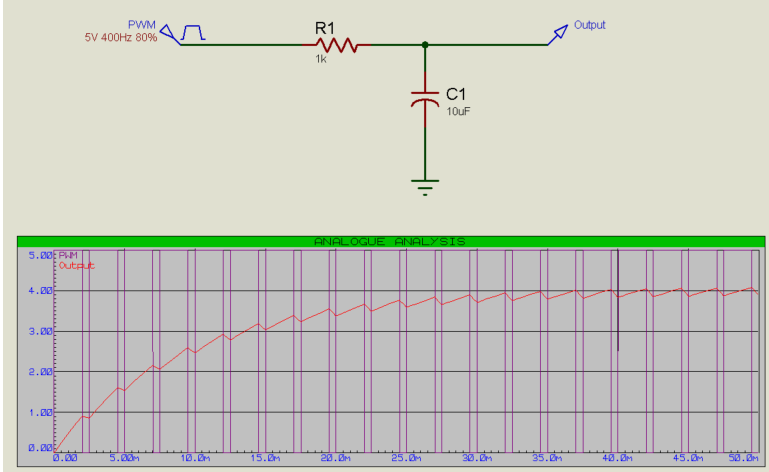
相反,80%的占空比将产生4V的输出(80%的5V = 4V):
提高PWM的频率也会降低输出的抖动:
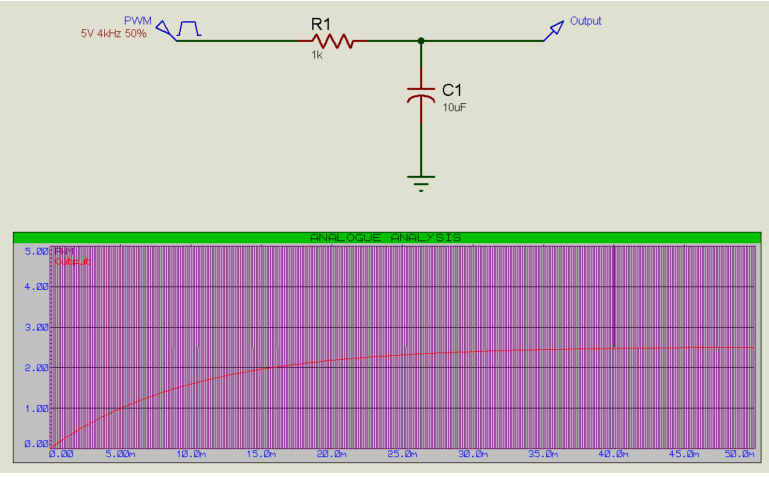
请注意,这反过来意味着可以使用相对较低的电阻和/或电容值,因此对输入变化的响应相对较快。这是PWM的一般规则:PWM频率越高,输出越平滑,响应越快。
然而,关于响应度,请记住,为了提高响应度,系统中的平滑元件(上例中的电阻电容低通滤波器)必须做得更小。或者,应该增加输入功率电平(上面例子中的输入波形电压)。在一个机械系统中,系统的平滑元素可能是系统的惯性(质量)——后面会详细介绍。
PWM频率的上限总是存在的——这可能受到产生PWM的数字系统的时钟频率的限制,或者受到输出系统中开关元件响应速度的限制——例如,一个继电器可能需要几毫秒来切换,或者一个阀门可能需要一些时间来打开/关闭。
正如我们的无源滤波器文章中,也可以使用电感-电阻低通滤波器:
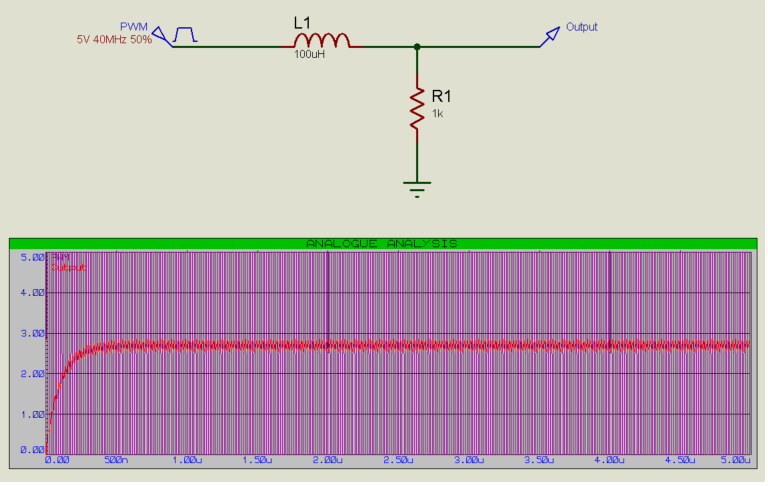
然而,由于所需的频率/元件尺寸较低,阻容滤波器通常更适合这种特殊应用。
嵌入式PWM
大多数现代微控制器都内置PWM外设,可以在一定的频率和分辨率范围内产生PWM输出。如果需要的频率低于PWM外设所能产生的频率,那么可以使用定时器中断并手动将引脚设置为高电平和低电平。
在Arduino中,analogWrite()函数直接生成PWM输出:
带机械元件的PWM
对于机械系统,系统的平滑元素通常是系统的惯性,即系统对输入变化的反应速度。这包括在我们的巴克和升压转换器使用飞轮/旋转木马概念的文章。
想象一下,我们在旋转木马上加了一个喷水器,我们可以用一个电磁阀打开和关闭这个喷水器。
如果我们打开阀门,那么旋转木马会转得更快,如果我们关闭阀门,那么旋转木马会由于空气和轴承的阻力而自然地慢下来。
根据牛顿第二运动定律,加速度=力/质量。如果我们假设力是恒定的(对于PWM,力通常被假设为恒定的,因为波形的电压是恒定的——我们现在不会变得比这更复杂,我们将假设水压是恒定的),那么我们可以看到加速度完全取决于质量(惯性)。旋转木马旋转的速度将由公式速度=加速度x时间给出。从这些公式中我们可以看出,速度与力成正比,如果力只施加了50%的时间(50%的占空比),那么速度也将是持续施加力时的50%。10%的占空比意味着10%的速度,90%的占空比意味着90%的速度,以此类推。由此可见,我们可以通过改变占空比,从数字输入(控制水射流完全打开或完全关闭)产生模拟输出(速度)。
有一些方面我们还没有详细研究,例如作用在水射流相反方向的阻力的细节,以及水射流与中心的距离将如何影响事物,但是我们已经研究的内容足以涵盖PWM原理。我们可以注意到,PWM的最大频率将受到控制喷水器的螺线管打开和关闭速度的限制,并且系统中的抖动(对于给定的频率)将取决于旋转木马的质量——这是因为旋转木马总是在加速(喷水器打开)或减速(空气/轴承阻力),但是质量越高,这些力产生的加速度(速度变化)越小(抖动越小)。
同样的原理也适用于由磁场驱动的DC发动机(而不是喷水器)、水箱中的加热元件、DC灯泡等等。PWM导致的LED明显变暗是由于我们眼睛的光学帧率(视觉暂留),但这是另一篇文章的主题!
总体而言,PWM的原理非常简单——将数字输入转换为模拟输出。系统中的变量是平滑元件的力(电压)、频率、占空比和惯性;并且这些的调谐限制因应用而异。