面向车载通信的TSN网络原型(下) | 效果验证
在上一篇文章中,我们概述性地介绍了北汇信息的TSN网络原型设计。本篇文章将基于该原型,通过在多个场景中验证TSN协议的效果,向读者展示TSN在车载网络中的价值。通过实验验证,我们将深入了解TSN技术在车载网络中的实际应用和性能表现,为读者提供更为深入的了解和参考。
01网络通信场景1-时间同步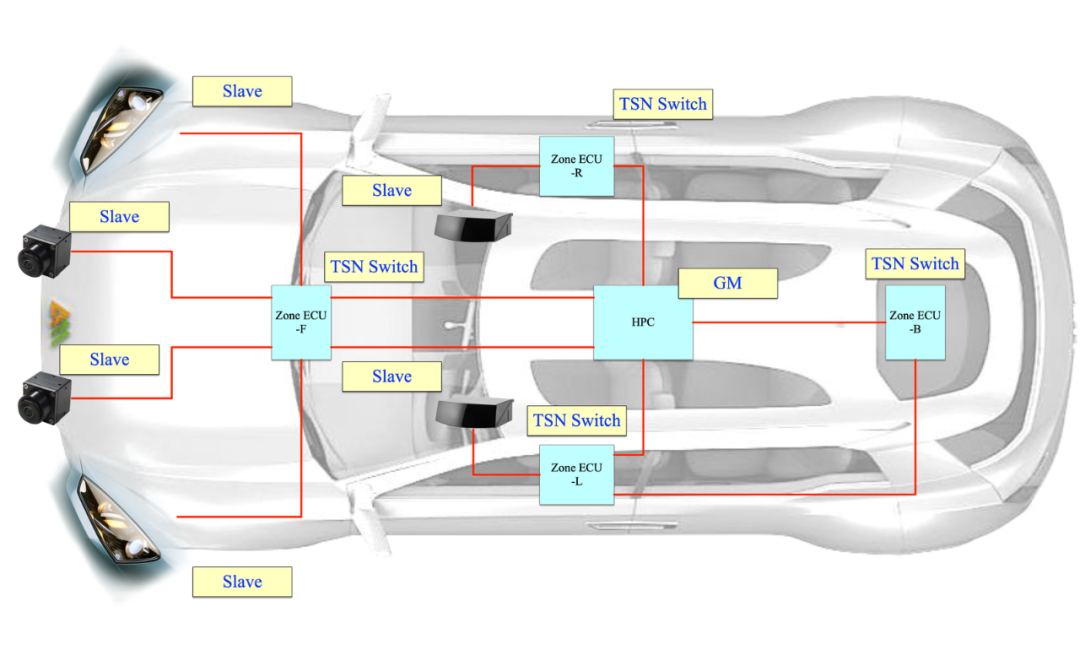 Lidar完成时间同步后,点云数据带有系统时间信息,PC预装的Lidar上位机软件正确显示系统时间; Camera 完成时间同步后,Display图像正确显示系统时间;Lidar与Camera的系统时间戳一致;02网络通信场景2Camera视频流网络传输QoS
Lidar完成时间同步后,点云数据带有系统时间信息,PC预装的Lidar上位机软件正确显示系统时间; Camera 完成时间同步后,Display图像正确显示系统时间;Lidar与Camera的系统时间戳一致;02网络通信场景2Camera视频流网络传输QoS
Camera-L视频数据流采用CBS调度; Camera-R视频数据流不采用CBS调度;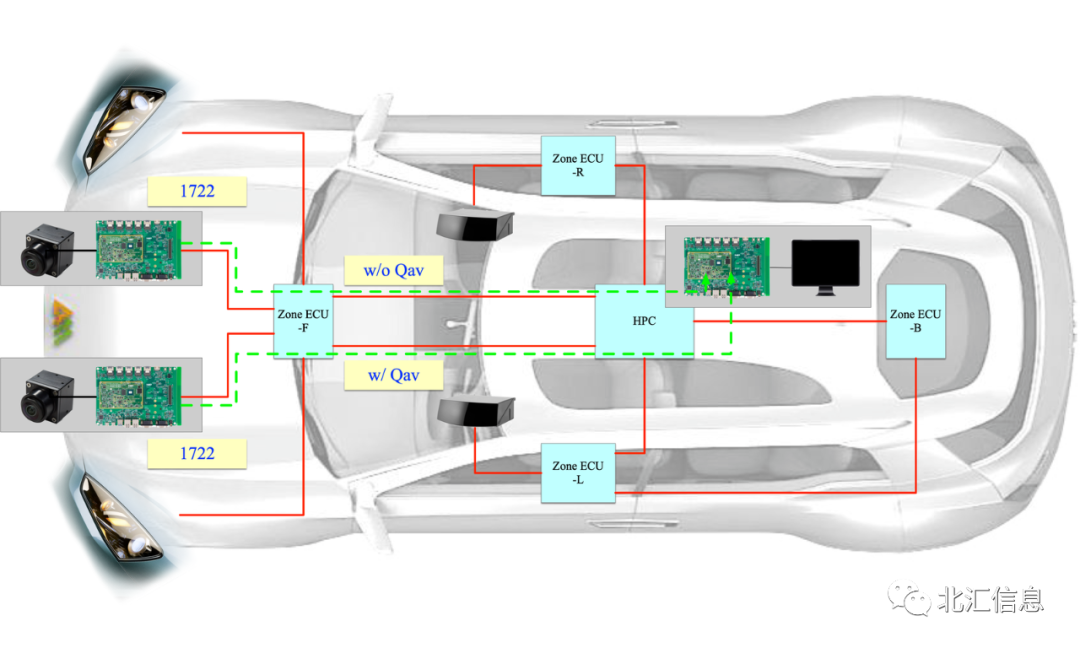 Good Case w/o interference
Good Case w/o interference
Camera视频流传输的网络路径中,增加网络数据流量,使网络数据吞吐量至带宽的100%;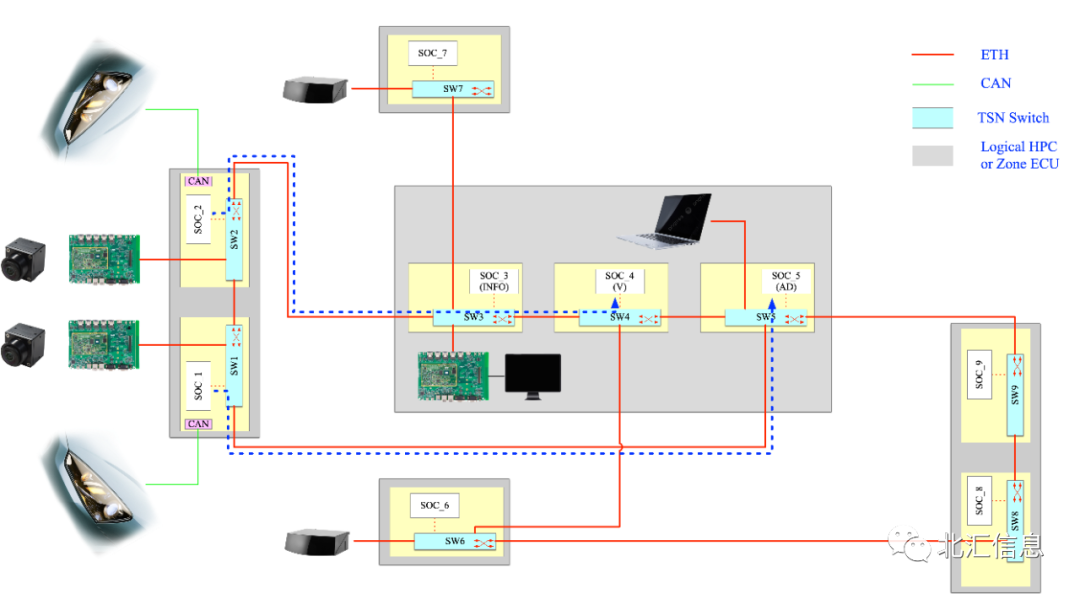
观测Display视频图像;
Camera-L的视频图像不受影响,即无卡滞或延迟现象;Camera-R的视频图像受网络吞吐量影响,即有卡滞与延迟现象;Bad Case w/ interference
03网络通信场景3Lidar点云数据网络传输QoSLidar-L点云数据流采用TAS调度; Lidar-R点云数据流不采用TAS调度;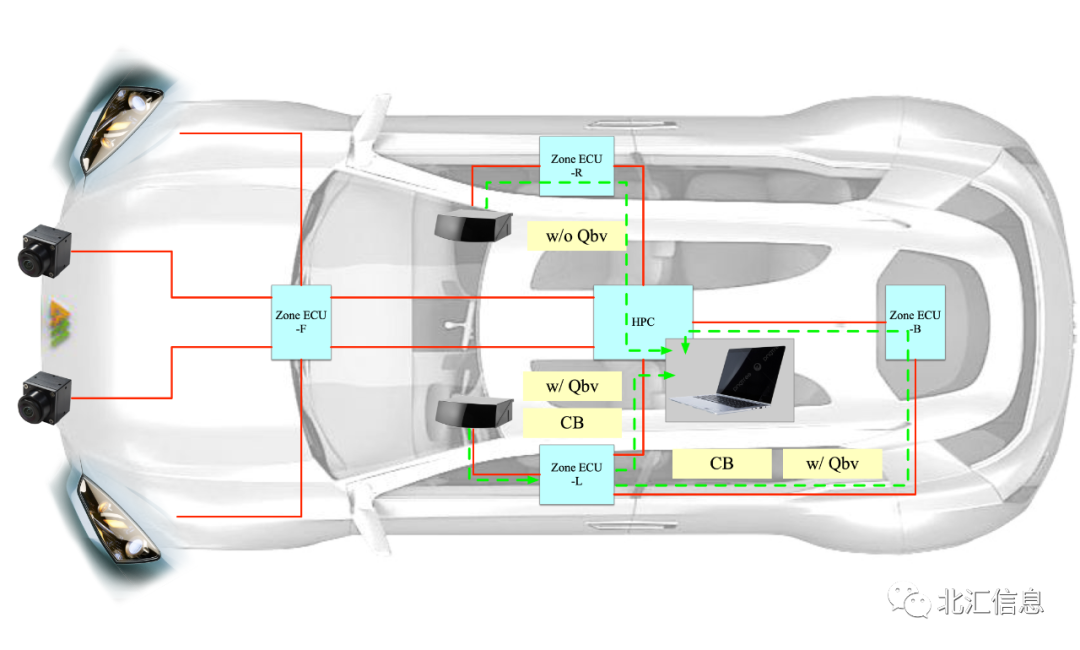 Good Case w/o interference
Good Case w/o interference
Lidar点云数据传输的网络路径中,增加网络数据流量,使网络数据吞吐量至带宽的100%;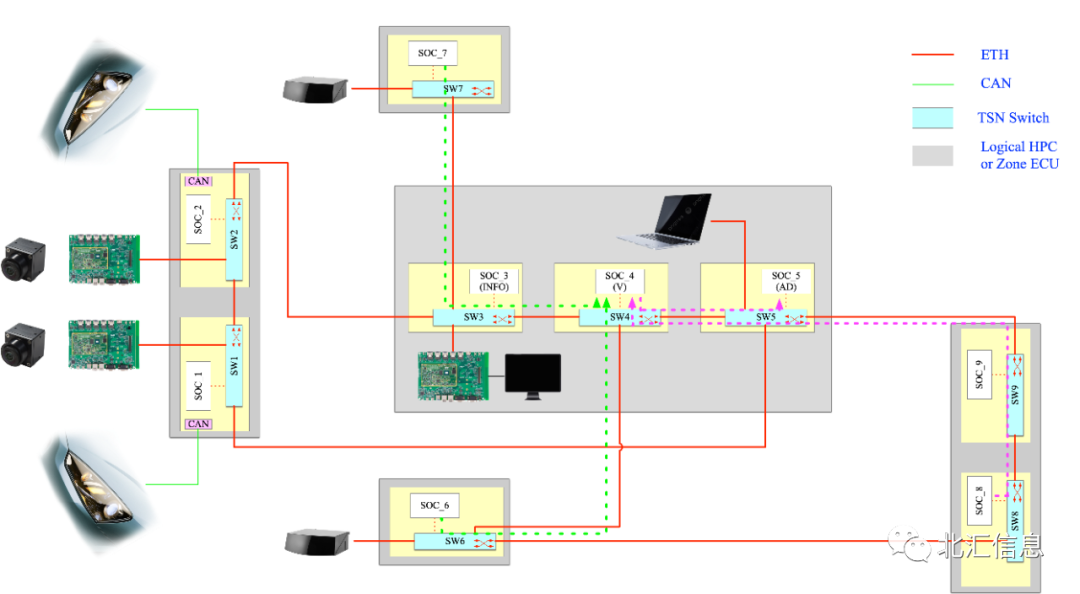
观测PC端点云图像
Lidar-L的点云图像不受影响;Lidar-R的点云图像受网络吞吐量影响,出现点云图像闪烁;Bad Case w/ interference
04网络通信场景4灯光闪烁控制数据流QoS Lamp-FL控制数据流采用TAS调度;
Lamp-FR控制数据流不采用TAS调度;
HPC分别发送Lamp-FL, Lamp-FR的闪烁控制数据流;
观测大灯闪烁情况:Lamp-FL,Lamp-FR同频率闪烁;Good Case w/o interference
Lamp控制数据流传输的网络路径中,增加网络数据流量,使网络数据吞吐量至带宽的100%;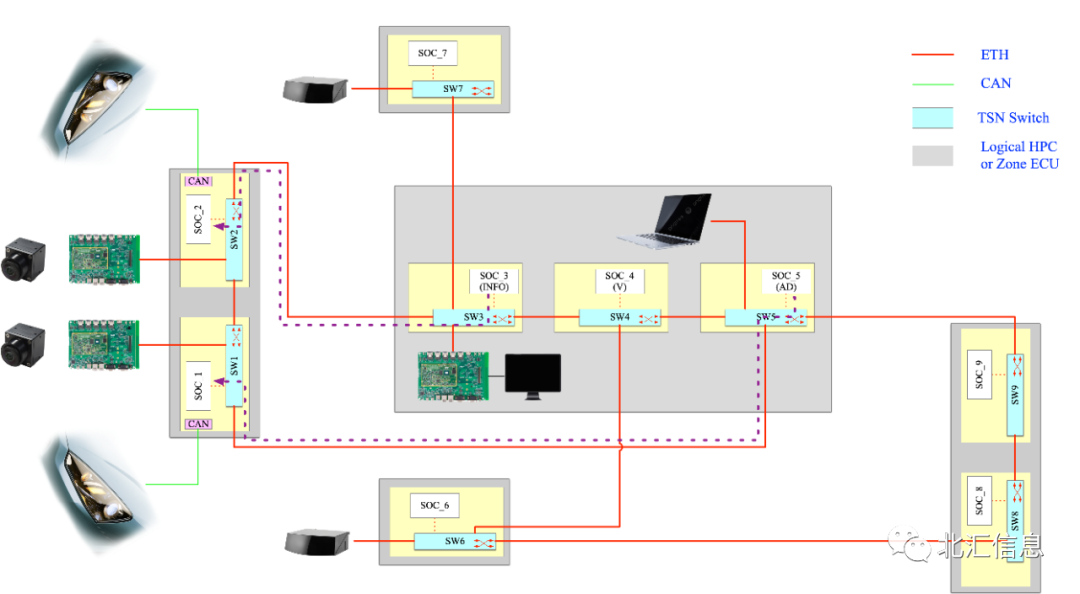
观测大灯闪烁情况:Lamp-FL,Lamp-FR不同频率闪烁;Bad Case w/ interference
05网络通信场景5-以太网环网 Lidar-L点云数据流采用环网传输,Lidar-R点云数据流不采用环网传输; 断开环网中的网络物理链路,PC端观测Lidar-L点云图像; 单一网络物理链路故障时,Lidar-L的点云图像不受影响,即不会造成功能失效;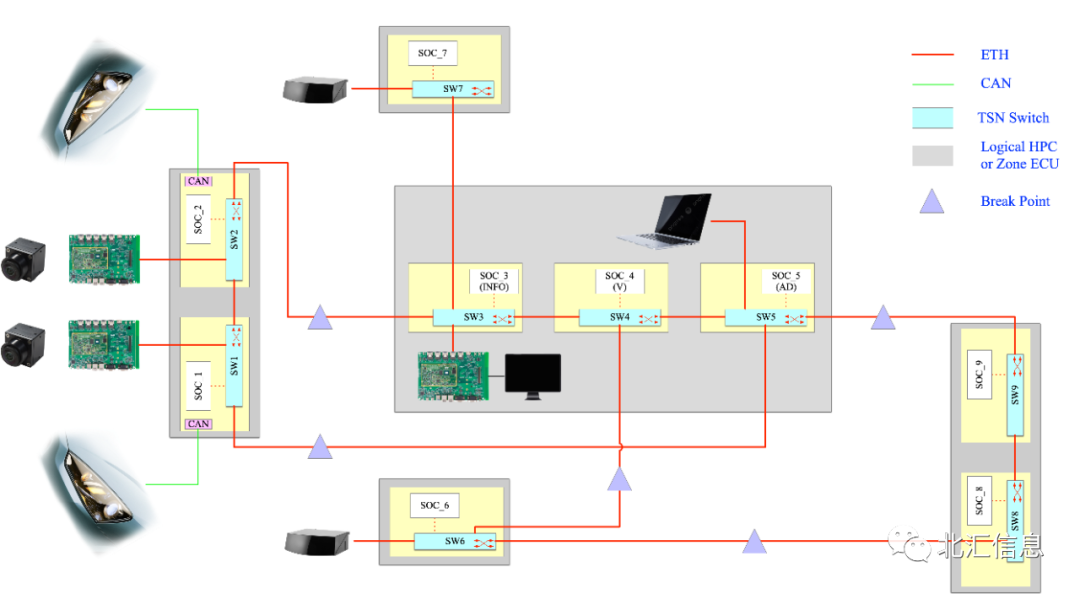
06总结经过在多种场景下的实验验证,我们可以发现TSN协议在车载网络应用中具有显著的优势和效果。即使存在大量干扰数据流或链路断开等极端情况下,TSN原型仍能够保持高质量的传输,从而提升了车载系统网络传输的实时性和可靠性。这些实验结果进一步验证了TSN技术在车载网络中的实际应用和性能表现,为未来车载系统的网络通信提供了可靠的技术支撑。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。