参考文件: stmf072cbu6数据手册
使用硬件spi需要注意事项:
文档中查找到相应的复用引脚表格:
Table 15. Alternate functions selected through GPIOB_AFR registers for port B
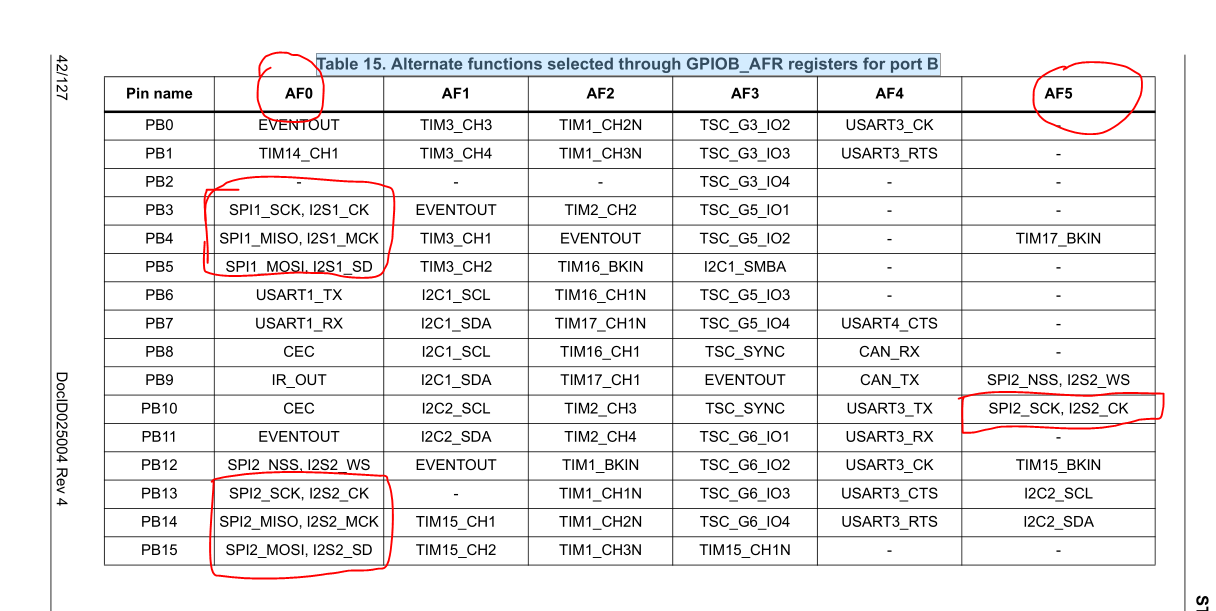
最好不要直接在标准库中直接查找(不够详细):
1 /**
2 * @brief Writes data to the specified GPIO data port.
3 * @param GPIOx: where x can be (A, B, C, D, E or F) to select the GPIO peripheral.
4 * @note GPIOC, GPIOD, GPIOE and GPIOF are available only for STM32F072 and STM32F091.
5 * @param GPIO_PinSource: specifies the pin for the Alternate function.
6 * This parameter can be GPIO_PinSourcex where x can be (0..15) for GPIOA, GPIOB, GPIOD, GPIOE
7 * and (0..12) for GPIOC and (0, 2..5, 9..10) for GPIOF.
8 * @param GPIO_AF: selects the pin to used as Alternate function.
9 * This parameter can be one of the following value:
10 * @arg GPIO_AF_0: WKUP, EVENTOUT, TIM15, SPI1, TIM17, MCO, SWDAT, SWCLK,
11 * TIM14, BOOT, USART1, CEC, IR_OUT, SPI2, TIM3, USART4,
12 * CAN, USART2, CRS, TIM16, TIM1, TS, USART8
13 * @arg GPIO_AF_1: USART2, CEC, TIM3, USART1, USART2, EVENTOUT, I2C1,
14 * I2C2, TIM15, SPI2, USART3, TS, SPI1, USART7, USART8
15 * USART5, USART4, USART6, I2C1
16 * @arg GPIO_AF_2: TIM2, TIM1, EVENTOUT, TIM16, TIM17, USB, USART6, USART5,
17 * USART8, USART7, USART6
18 * @arg GPIO_AF_3: TS, I2C1, TIM15, EVENTOUT
19 * @arg GPIO_AF_4: TIM14, USART4, USART3, CRS, CAN, I2C1, USART5
20 * @arg GPIO_AF_5: TIM16, TIM17, TIM15, SPI2, I2C2, USART6, MCO
21 * @arg GPIO_AF_6: EVENTOUT
22 * @arg GPIO_AF_7: COMP1 OUT, COMP2 OUT
23 * @note The pin should already been configured in Alternate Function mode(AF)
24 * using GPIO_InitStruct->GPIO_Mode = GPIO_Mode_AF
25 * @note Refer to the Alternate function mapping table in the device datasheet
26 * for the detailed mapping of the system and peripherals'alternate
27 * function I/O pins.
28 * @retval None
29 */
30 void GPIO_PinAFConfig(GPIO_TypeDef* GPIOx, uint16_t GPIO_PinSource, uint8_t GPIO_AF)
具体操作配置:
// spi2 的初始化
void SPI2_idev_Init( void)
{
GPIO_InitTypeDef GPIO_InitStructure;
SPI_InitTypeDef SPI_InitStructure;
RCC_AHBPeriphClockCmd( RCC_AHBPeriph_GPIOB, ENABLE );
RCC_APB1PeriphClockCmd( RCC_APB1Periph_SPI2, ENABLE );
GPIO_PinAFConfig(GPIOB, GPIO_PinSource10 , GPIO_AF_5); // 使用的引脚是 PORTB.10
GPIO_PinAFConfig(GPIOB, GPIO_PinSource14 , GPIO_AF_0);
GPIO_PinAFConfig(GPIOB, GPIO_PinSource15 , GPIO_AF_0);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_15 |GPIO_Pin_14|GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_Level_3;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_SetBits(GPIOB, GPIO_Pin_15 |GPIO_Pin_14|GPIO_Pin_10);
SPI_I2S_DeInit( SPI2);// 复位
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex;
SPI_InitStructure.SPI_Mode = SPI_Mode_Master;
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b;
SPI_InitStructure.SPI_CPOL = SPI_CPOL_Low;
SPI_InitStructure.SPI_CPHA = SPI_CPHA_1Edge;
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft;
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_2;
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB;
SPI_InitStructure.SPI_CRCPolynomial = 7;
SPI_Init(SPI2, &SPI_InitStructure);
SPI_RxFIFOThresholdConfig( SPI2,SPI_RxFIFOThreshold_QF); // 与stm32f1xx 主要区别点
SPI_Cmd(SPI2, ENABLE);
}
// SPI 写8位
void SPI2_WriteByte(uint8_t data)
{
while((SPI2->SR&SPI_I2S_FLAG_TXE)==RESET); // 等待发送区为空
SPI_SendData8(SPI2,data);
}
// SPI 读写
uint8_t drv_spi_read_write_byte( uint8_t TxByte )
{
uint16_t retry=0;
while (SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_TXE) == RESET) // 等待发送区为空
{
retry++;
if(retry>400) {
return 0;
}
}
SPI_SendData8(SPI2, TxByte);
retry=0;
while (SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_RXNE) == RESET) //等待接收缓冲区为空
{
retry++;
if(retry>400)
{
return 0;
}
}
return SPI_ReceiveData8(SPI2);
}
这样就基本没有什么问题的啦