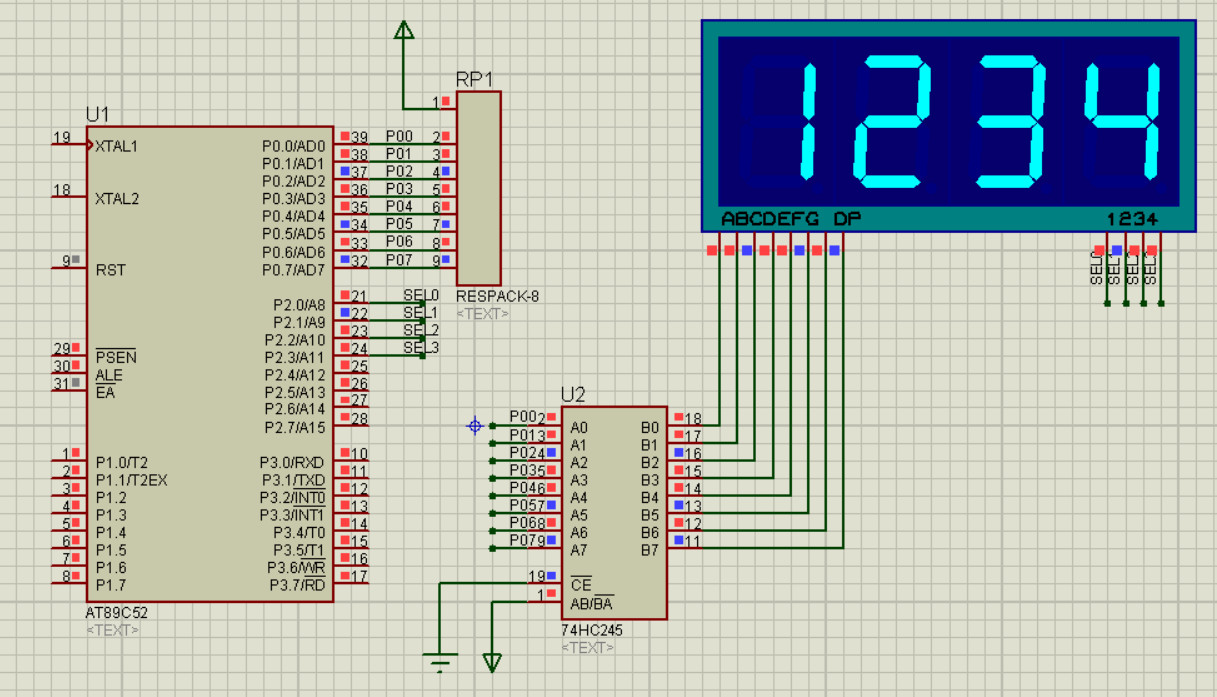
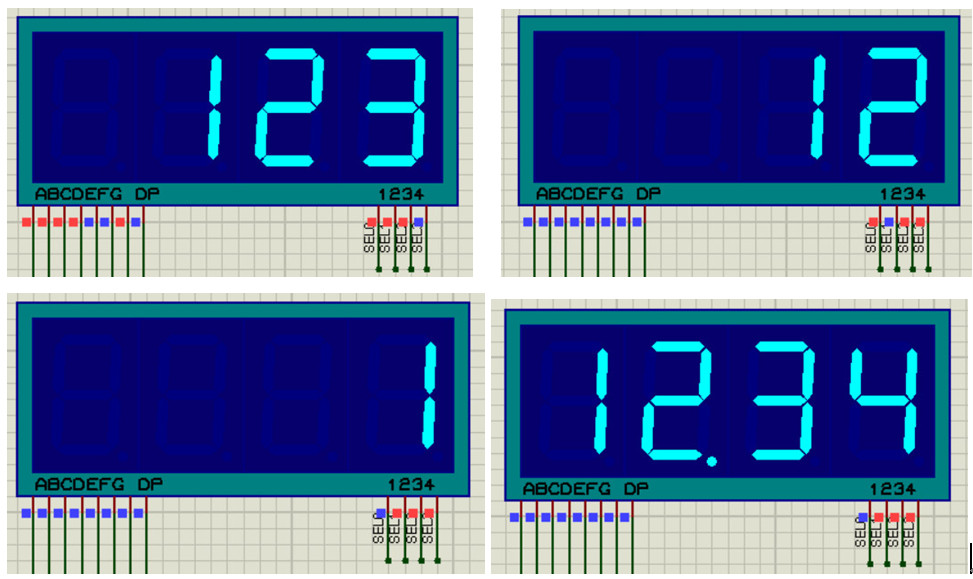
数码管动态显示(定时器中断方式)+小数点+高位为0不显示
1 仿真现象

2 程序设计
2.1 主程序
#include
#include "DisplaySmg.h"
#include "Timer0.h"
unsigned int adc_result = 1234;
void disp_num(void) //显示四位十进制数
{
if(adc_result>=1000) //千位
{
LedBuf[0]= adc_result/1000;
}
else
{
LedBuf[0]=23; //不显示
}
if(adc_result>=100) //百位
{
LedBuf[1]= adc_result/100%10;
}
else
{
LedBuf[1]=23; //不显示
}
if(adc_result>=10) //十位
{
LedBuf[2]= adc_result/10%10;
}
else
{
LedBuf[2]=23; //不显示
}
LedBuf[3]= adc_result%10; //个位
}
void main()
{
Timer0_Init(); //定时/计数器T0初始化
EA=1; //中断总开关
DotDig1=1; //点亮第二个数码管的小数点
while(1)
{
disp_num(); //显示数据
}
}
void Timer0_ISR(void) interrupt 1
{
TR0=0; //关闭定时器
DisplaySmg(); //每过1ms,刷新一次数码管显示函数
TL0 = 0x66; //设置定时初始值,定时1ms
TH0 = 0xFC; //设置定时初始值,定时1ms
TR0=1; //打开定时器
}
2.2 数码管显示函数模块
#ifndef __DisplaySmg_H__
#define __DisplaySmg_H__
#include
#define GPIO_SEG P0 //段选端
#define GPIO_SEL P2 //位选端
extern unsigned char LedBuf[]; //外部变量声明
extern unsigned char DotDig0,DotDig1,DotDig2,DotDig3;
void DisplaySmg(void);
#endif
#include "DisplaySmg.h"
unsigned char code LedData[]={ //共阴型数码管的段码表,字符,序号
0x3F, //"0",0
0x06, //"1",1
0x5B, //"2",2
0x4F, //"3",3
0x66, //"4",4
0x6D, //"5",5
0x7D, //"6",6
0x07, //"7",7
0x7F, //"8",8
0x6F, //"9",9
0x77, //"A",10
0x7C, //"B",11
0x39, //"C",12
0x5E, //"D",13
0x79, //"E",14
0x71, //"F",15
0x76, //"H",16
0x38, //"L",17
0x37, //"n",18
0x3E, //"u",19
0x73, //"P",20
0x5C, //"o",21
0x40, //"-",22
0x00, //熄灭 23
};
unsigned char DotDig0=0,DotDig1=0,DotDig2=0,DotDig3=0; //小数点控制位
unsigned char code LedAddr[]={0xfe,0xfd,0xfb,0xf7}; //数码管位选
unsigned char LedBuf[]={22,22,22,22}; //显示缓存区
void DisplaySmg() //四位数码管,考虑小数点
{
unsigned char i; //等价于 "static unsigned char i = 0;"
unsigned char temp;
switch(i)
{
case 0:
{
GPIO_SEG = 0x00; //消影
if(DotDig0==1) //小数点
{
temp = LedData[LedBuf[0]] | 0x80; //点亮小数点
}
else
{
temp = LedData[LedBuf[0]];
}
GPIO_SEG = temp; //段码
GPIO_SEL = LedAddr[0]; //位选
i++;
break;
}
case 1:
GPIO_SEG = 0x00;
if(DotDig1==1) //小数点
{
temp = LedData[LedBuf[1]] | 0x80;
}
else
{
temp = LedData[LedBuf[1]];
}
GPIO_SEG = temp;
GPIO_SEL = LedAddr[1];
i++;
break;
case 2:
GPIO_SEG = 0x00;
if(DotDig2==1) //小数点
{
temp = LedData[LedBuf[2]] | 0x80;
}
else
{
temp = LedData[LedBuf[2]];
}
GPIO_SEG = temp;
GPIO_SEL = LedAddr[2];
i++;
break;
case 3:
GPIO_SEG = 0x00;
if(DotDig3==1) //小数点
{
temp = LedData[LedBuf[3]] | 0x80;
}
else
{
temp = LedData[LedBuf[3]];
}
GPIO_SEG = temp;
GPIO_SEL = LedAddr[3];
i=0;
break;
default:break;
}
}
2.3 定时计数器模块
#ifndef __Timer0_H__
#define __Timer0_H__
#include
void Timer0_Init(void);
#endif
#include "Timer0.h"
void Timer0_Init(void) //1毫秒@11.0592MHz
{
TMOD &= 0xF0; //设置定时器模式
TMOD |= 0x01; //设置定时器模式
TL0 = 0x66; //设置定时初始值
TH0 = 0xFC; //设置定时初始值
TF0 = 0; //清除TF0标志
TR0 = 1; //定时器0开始计时
ET0 = 1; //定时器0中断开关
// EA = 1; //中断总开关
}
//中断服务函数一定是一个没有返回值的函数
//中断服务函数一定是没有参数的函数
//中断服务函数函数名后跟着关键字interrupt
//interrupt n 0~4 5个中断源,8*n+0003H
// 0003H INT0, 00BH T0, 0013H INT1, 001BH T1, 0023H ES
//中断服务函数不能被主程序或者其他程序所调用
//n后面跟着using m(0~3)工作寄存器组
//void Timer0_ISR(void) interrupt 1
//{
// TL0 = 0x66; //设置定时初始值
// TH0 = 0xFC; //设置定时初始值
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。