






 技术咨询
技术咨询 代买器件
代买器件 商务客服
商务客服 研发客服
研发客服前言:
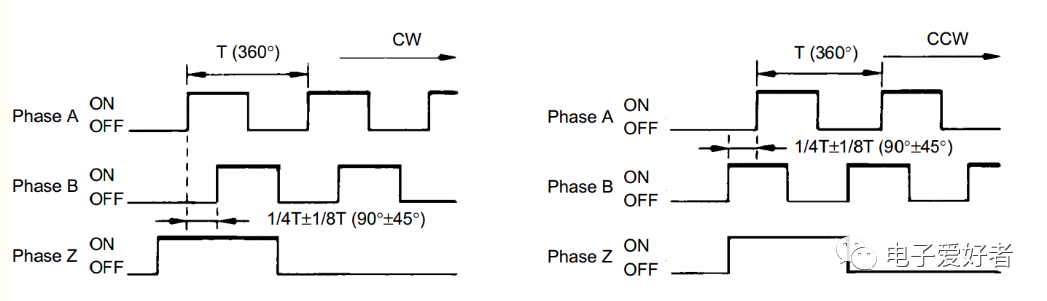
增量式编码器在实际应用中还是很常见。 stm32的定时器带的也有编码器模式。 所用的编码器是有ABZ三相,其中ab相是用来计数,z相输出零点信号。 AB相根据旋转的方向不同,输出的波形如下图所示:
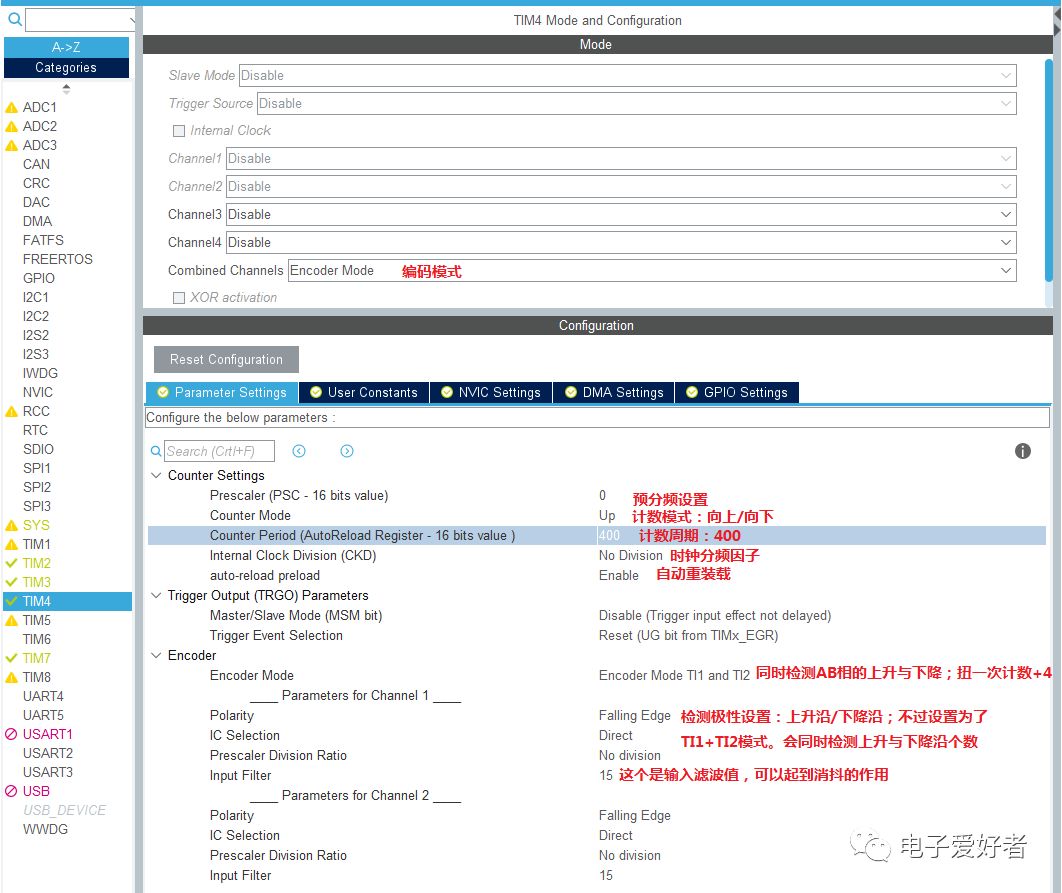
第一步:具体配置如下图:
重点说明:
一、如果编码模式设置为 Encoder Mode TI1 and TI2 则会默认检测AB相的上升沿与下降沿;
每一个上升沿和下降沿都触发计数,所以每转一格计数器就会+4;那么上图计数周期设置为400; 也就是编码器转100格,计数器就会置零,重新开始计数!
二、关于Polarity参数:这个参数的意思是在检测到上升沿的时候就触发encoder捕获AB相的值,而并不是这里设置的是上升沿就只检测AB相的上升沿,下降沿还是同样会计数的。
第二步:
可以根据自身需要在NVIC 中断控制器中配置中断响应优先级。 这里的配置方法可以参考前面几章!
第三步:代码分析:
static void MX_TIM4_Init(void)
{
/* USER CODE BEGIN TIM4_Init 0 */
/* USER CODE END TIM4_Init 0 */
TIM_Encoder_InitTypeDef sConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
/* USER CODE BEGIN TIM4_Init 1 */
/* USER CODE END TIM4_Init 1 */
htim4.Instance = TIM4;
htim4.Init.Prescaler = 0;
htim4.Init.CounterMode = TIM_COUNTERMODE_UP;
htim4.Init.Period = 400;
htim4.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim4.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;
sConfig.EncoderMode = TIM_ENCODERMODE_TI12;
sConfig.IC1Polarity = TIM_ICPOLARITY_FALLING;
sConfig.IC1Selection = TIM_ICSELECTION_DIRECTTI;
sConfig.IC1Prescaler = TIM_ICPSC_DIV1;
sConfig.IC1Filter = 15;
sConfig.IC2Polarity = TIM_ICPOLARITY_FALLING;
sConfig.IC2Selection = TIM_ICSELECTION_DIRECTTI;
sConfig.IC2Prescaler = TIM_ICPSC_DIV1;
sConfig.IC2Filter = 15;
if (HAL_TIM_Encoder_Init(&htim4, &sConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim4, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM4_Init 2 */
HAL_TIM_Encoder_Start(&htim4, TIM_CHANNEL_ALL); //启动编码器接口
/* USER CODE END TIM4_Init 2 */
}
//主函数里面调用计数值
while (1)
{
// Enc_Count:获取计数个数
Enc_Count = __HAL_TIM_GET_COUNTER(&htim4);
//若需要检测编码器转了多少格,记得要/4,因为转一格是+4;
//Enc_Count = __HAL_TIM_GET_COUNTER(&htim4)/4;
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}