如何利用车载传感器技术消除汽车盲区?
最近因为汽车盲区引发的一起悲剧事件,让大家又开始重新重视起汽车盲区的问题。一试验结果显示一辆SUV的盲区里能藏下75个孩子。所以今天我们就来聊聊盲区的事情。随着车辆越来越智能,今后是否可以靠技术手段解决盲区?
Part 1、驾驶中哪些地方会存在盲区
汽车的盲区主要分为静态盲区和动态盲区,而动态的盲区往往更危险。
静态盲区包括:
◎ 车后方盲区:面积约为20平方米。
◎ 车前方盲区:纵向距离为2米。这两米内,在约0.6米的距离内,是完全看不见低矮物体的;超过2米远的物体才能看到完整;大型越野车等车辆的前方盲区距离可能达到3米甚至更远。
◎ 车左侧盲区:有两个,一个是是在距离左侧车门大约0.3米的范围内,还有车辆左后方区域。
◎ 车右侧盲区:稍微好一点,主要由车辆的B柱造成。当车辆需要大角度拐到右侧时,B柱会遮挡驾驶员的视线,导致盲区的出现。
动态盲区常说的类似“鬼探头”的场景,相比静态盲区其实更危险。
Part 2、如何通过技术手段改进对盲区的检测
盲区探测可以依靠的技术手段就是:传感器。在目前的辅助驾驶系统中,主要传感器件包括摄像头、毫米波雷达和激光雷达。
● 视觉系统(摄像头)
在早期的设计中,通过360度视觉系统让驾驶员可以看清周围的情况。这个360度环视,实际就是在车的前后左右分别装上4个摄像头。一开始只是简单识别摄像头捕捉到的图像,后来,经过图像处理和合成,系统还能够生成一张综合图像,可以显示了车辆底部的实时情况。
在进阶的自动辅助驾驶系统中,还利用Transformer技术将车辆摄像头的2D图像转换为3D环境鸟瞰图,也称为"BEV"模型。这是利用了人工智能图像处理技术,让汽车就像人类通过眼睛观察世界一样。可以有效处理多个摄像头产生的大量数据。
● 超声波传感器(超声波雷达)
超声波通过测量声波发射和接收之间的时间差,并结合声波在空气中的速度,可以计算出与反射物体的距离。我们所熟知的倒车雷达用的就是超声波传感器。
车辆上通常会在前后各使用6个超声波传感器,通过多个传感器的配合,利用三角测量原理,可以计算物体与车辆保险杠之间的直线距离。
因为超声波传感器的成本较低,而且也不容易受到光线、雨雪天气的影响,所以也是应用得最早的盲区探测手段。但超声波雷达的问题,首先它探测的角度比较窄,所以要用的数量比较多;另外就是探测的距离一般也只有0.5米,再远就没用了,所以没法准确识别到动态的物体。最重要的是,超声波对人的检测,可能会受到衣服材质的影响,会识别不准确,所以基本上也只在倒车的时候才会用到。

● 毫米波雷达
这个雷达一般会装在车的四个角,所以有时又被叫角雷达。毫米波雷达主要有两个用处:后方来车的盲点检测、和前向碰撞预警。
◎ 盲点检测。
◎ 前向碰撞预警。
毫米波雷达的 “进化型”是4D毫米波雷达。比普通的毫米波雷达多了高度信息,所以叫4D。这个雷达目前在自动辅助驾驶领域有更多的应用,它最厉害的一点是有“透视眼”,对于前面提到的很多动态盲区都能探测到。而且对盲区的检测,雷达的反应速度比摄像头更快,所以也更有用。
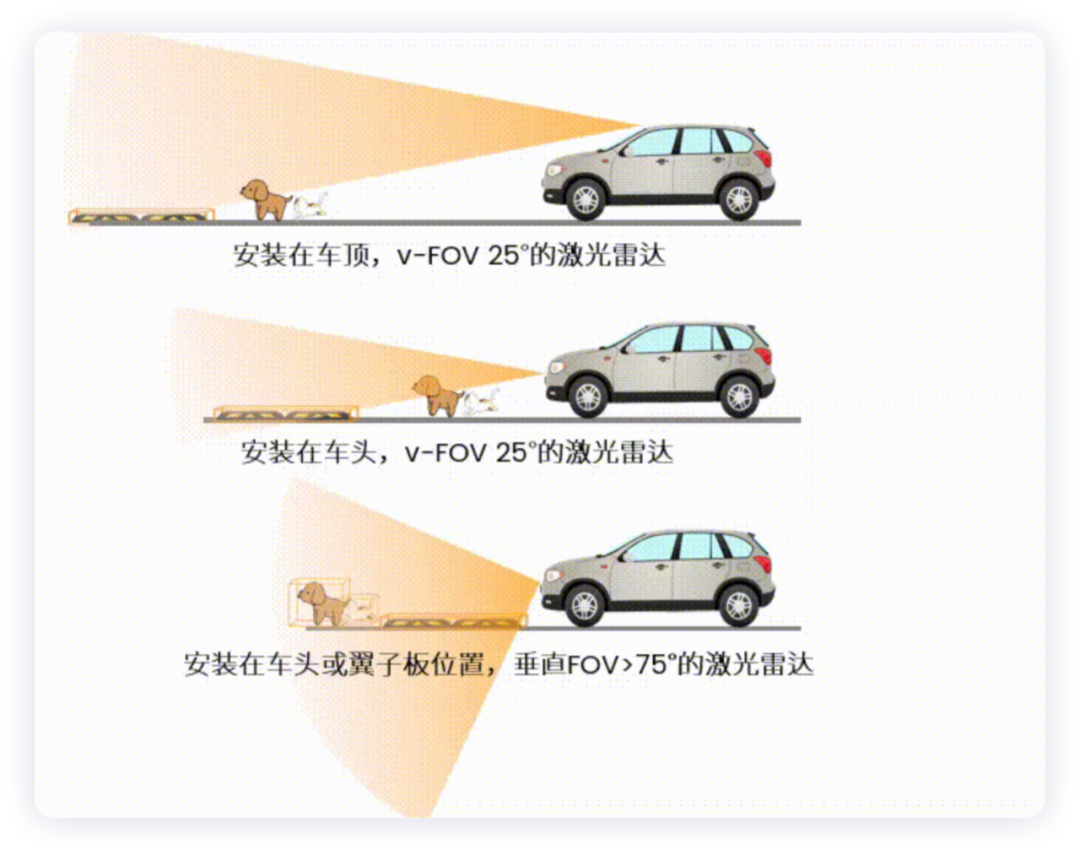
● 激光雷达
激光雷达的优点能测很远的距离,比较清楚;但是因为需要对点云数据进行大量的运算处理,所以需要配置更高算力的芯片,否则无法发挥出激光的优势,这又把成本提高了。所以目前在30万以下的车,一般很难看到激光雷达(这期视频录的时候,还没有;但等剪出来的时候,我们已经下定了一台20万+的带激光雷达的车)。
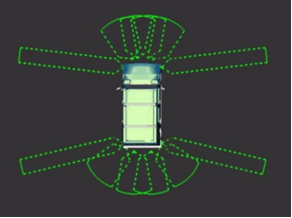
为了弥补成本的劣势,还有一种更高性价比的补盲激光雷达。相比强调高性能的主激光雷达,补盲激光雷达的视场角较小,探测距离也更短,尤其对动态的盲区特别有效。可能会更早在平价的车辆上配置。

▲表1.亮道给出的特性评价表

▲图2.车顶的配置和实际效果
▲图3.检测的目标
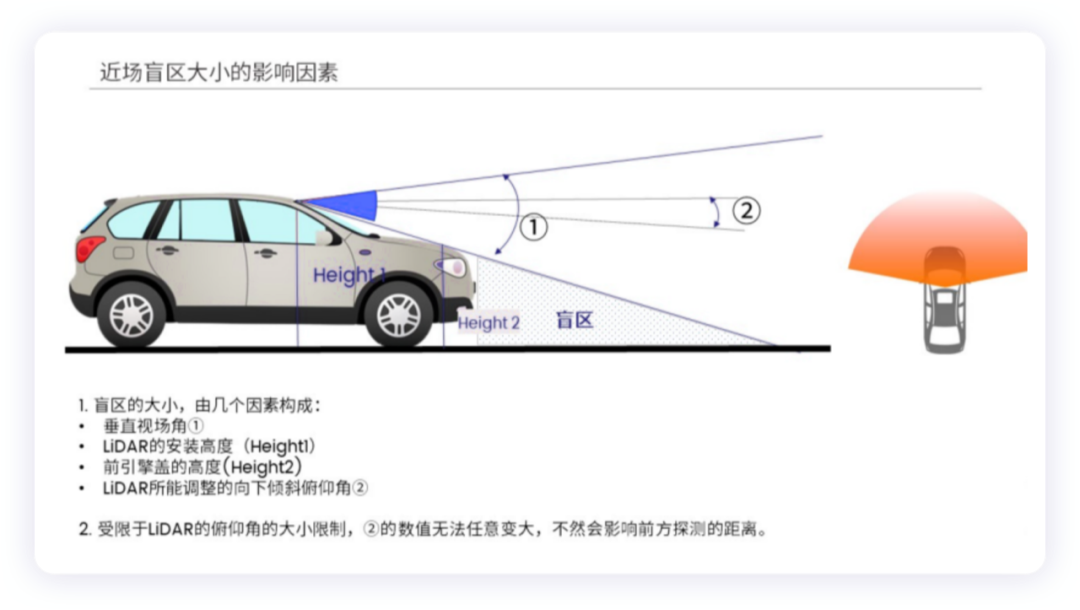
▲图4.盲区的大小
小结
虽然盲区无法完全消除,但通过这些技术手段可以尽最大程度地避免盲区带来的问题。科技是第一生产力,期待未来的智能化的汽车,能带我们安全地驶往明天的目的地!
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。