






 技术咨询
技术咨询 代买器件
代买器件 商务客服
商务客服 研发客服
研发客服总述
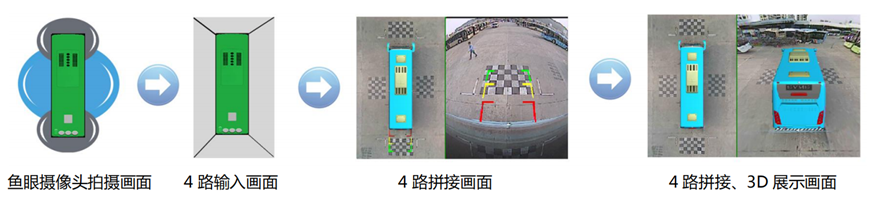
全景环视系统是通过安装在汽车前、后、左、右四个广角摄像头采集的车辆四周的实时画面,通过摄像头内参标定,外参标定,鱼眼图像畸变矫正,全景模型拼接,亮度均衡等算法,形成一幅准确的2D拼接的鸟瞰图。同时,在原有2D拼接图的基础上通过三维转换的算法,可生成任意角度的3D视角。依托2D和3D的实时画面,可完成全景环视系统的功能。
本文主要阐述内容有:全景环视算法说明、全景环视算法流程、全景环视算法模型以及全景环视标定方案。
全景环视算法说明
摄像头内参标定、外参标定
鱼眼图像畸变矫正
全景模型拼接
图像亮度均衡
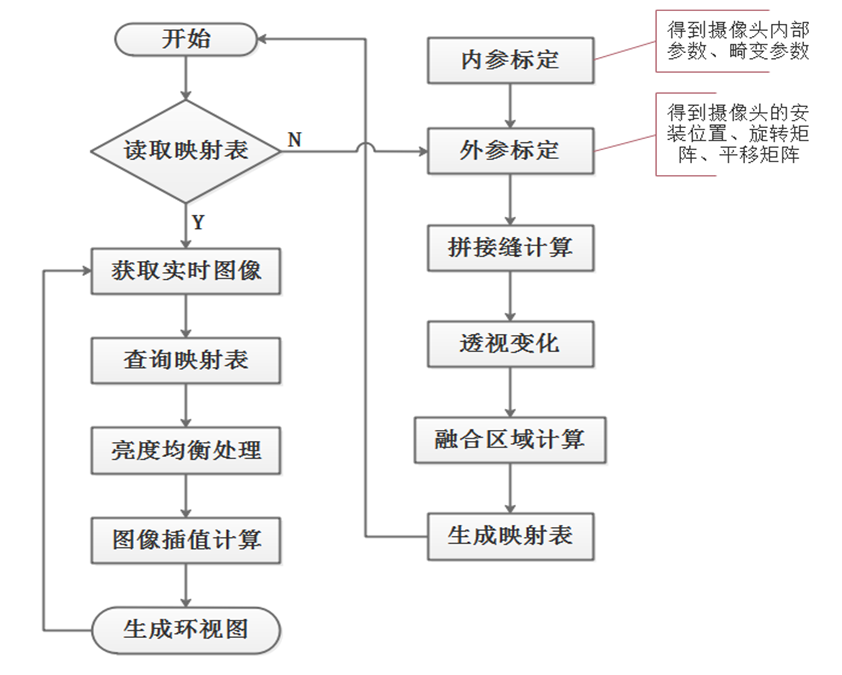
全景环视算法流程
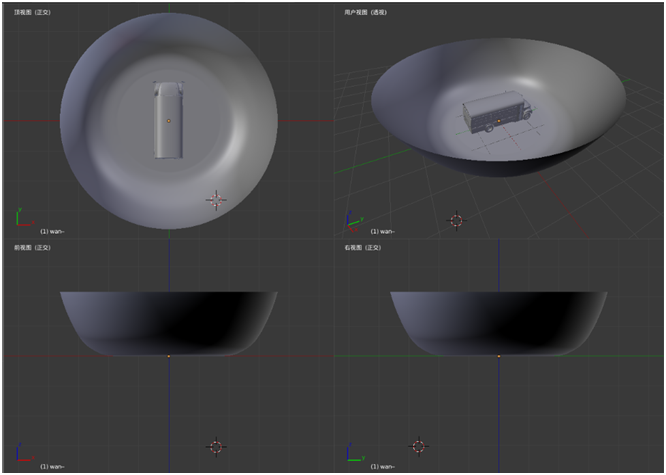
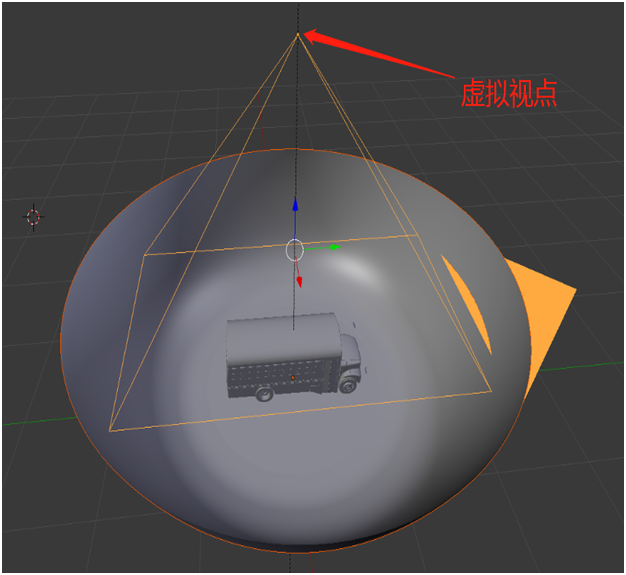
全景环视算法模型
全景环视标定方案
系统标定流程

系统标定手段

环视系统-量产标定方式

文章来源于:电子工程世界 原文链接
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。