






 技术咨询
技术咨询 代买器件
代买器件 商务客服
商务客服 研发客服
研发客服区域和轮廓只包含对分割结果的原始描述,在实际应用中我们还需要从区域或轮廓中确定一个或多个特征量。这些确定的特征量被称为特征。
确定特征的过程被称为图像特征提取。
一、概述
1.图像特征的分类
(1)图像的视觉特征
边缘、轮廓、形状、纹理和区域等。
(2)图像的统计特征
灰度直方图特征、矩特征,其中矩特征包括均值、方差、峰度及熵特征等。
(3)图像变换系数特征
傅立叶变换、离散余弦变换、小波变换等。
(4)图像代数特征
矩阵的奇异值
2. 特征提取与特征选择
(1)特征选择
从一组特征中挑选出一些最有效的特征,以达到降低特征空间维数的目的。
(2)特征提取
对原始特征进行变换得到的这些有利于分类、更本质、更少的新特征的过程。
二、兴趣点提取
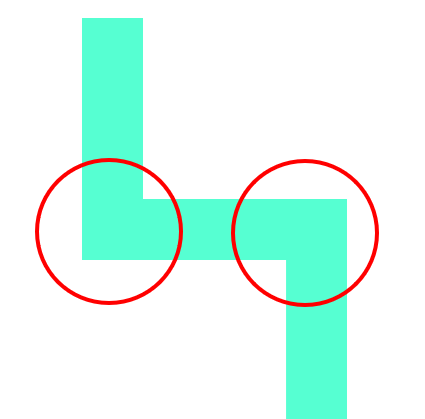
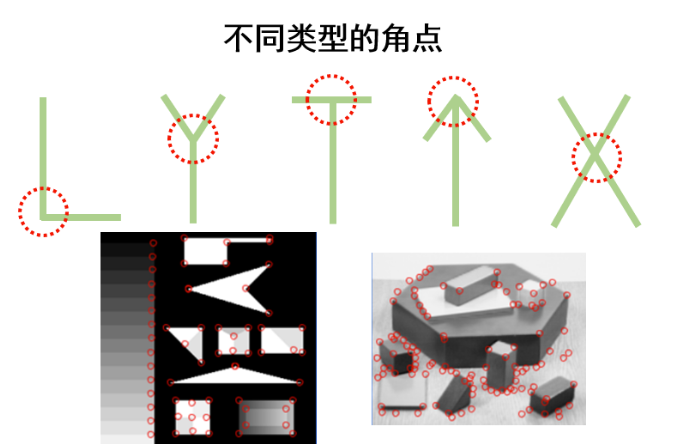
1.什么是兴趣点
兴趣点是指图像信号在二维空间上发生变化的区域,通常情况下包括拐角点、交点和纹理等显著变化区域。
2.兴趣点标定的方法
(1)基于轮廓线的方法
轮廓线具有曲率变化的特征,可归类为结点,端点等类型。如在图像中寻找脊和谷的方法对兴趣点进行标定。
(2)基于图像强度的方法
信号的自相关函数检测特征点,灰度值的差大于某个门限时即认为该点是兴趣点。
(3)基于参数模型的方法
使用高斯卷积模型对拐角进行识别, 使用最小化方法,使得模板与观测信号最佳匹配。
3.兴趣点的表达方法
(1)尺度不变特征变换(Scale-invariant feature transform,SIFT)
使用了128维的向量对兴趣点特征进行表达,该向量通过Lowe建立的码表形成。该方法可以做到缩放不变、亮度不变的特性。
(2)可控滤波器和梯度不变方法
使用高斯滤波器的方法求图像的梯度,具有长度为13的维数。
(3)区域矩不变特性
通过改变统计矩的组合,适用于图像的多种不变特性的应用。
(4)频域分析法
通过Gabor滤波器来捕捉图像在频率和方向上的细微变化,描述的维度很高。
三、Harris角点算法
1.概述
当滑动窗口处于一个兴趣点发生的地方,无论从哪个方向移动该窗口,都会发生图像强度(灰度值)的剧烈变化。
基于图像灰度的方法通过计算点的曲率及梯度来检测角点,避免了第一类方法存在的缺陷,此类方法主要有Moravec算子、Forstner算子、Harris算子、SUSAN算子等。
2.原理
图像窗口滑动后灰度值变化计算:

小距离窗口滑动近似计算:
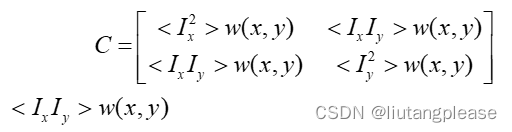
首先采用Sobel算子计算出梯度Ix和Iy,再逐点计算其乘积,最后使用高斯窗对该乘积图像的所有像素点进行卷积即可。
3.MATLAB编程实现
img=imread('F:lena.png');imshow(img);img = rgb2gray(img);
%转换为灰度图像img =double(img);[m n]=size(img);
%获取图像尺寸tmp=zeros(m+2,n+2);
%创建空矩阵tmptmp(2:m+1,2:n+1)=img;
%将img赋值给tmp矩阵Ix=zeros(m+2,n+2);Iy=zeros(m+2,n+2);E=zeros(m+2,n+2);
%创建空矩阵Ix,Iy,EIx(:,2:n)=tmp(:,3:n+1)-tmp(:,1:n-1);
%求横向梯度Iy(2:m,:)=tmp(3:m+1,:)-tmp(1:m-1,:); %求纵向梯度 Ix2=Ix(2:m+1,2:n+1).^2;
%求梯度方向乘积Iy2=Iy(2:m+1,2:n+1).^2;Ixy=Ix(2:m+1,2:n+1).*Iy(2:m+1,2:n+1);
h=fspecial(‘gaussian’,[7 7],2);
%使用高斯核进行加权Ix2=filter2(h,Ix2);Iy2=filter2(h,Iy2);Ixy=filter2(h,Ixy);Rmax=0;R=zeros(m,n);for i=1:m
for j=1:n
M=[Ix2(i,j) Ixy(i,j);Ixy(i,j) Iy2(i,j)];
R(i,j)=det(M)-0.06*(trace(M))^2;
%计算角点量
if R(i,j)>Rmax
Rmax=R(i,j);
%阈值判断
end
endend
re=zeros(m+2,n+2);tmp(2:m+1,2:n+1)=R;img_re=zeros(m+2,n+2);img_re(2:m+1,2:n+1)=img;for i=2:m+1
for j=2:n+1
if tmp(i,j)>0.02*Rmax &&...
tmp(i,j)>tmp(i-1,j-1) && tmp(i,j)>tmp(i-1,j) && tmp(i,j)>tmp(i-1,j+1) &&...
tmp(i,j)>tmp(i,j-1) && tmp(i,j)>tmp(i,j+1) &&...
tmp(i,j)>tmp(i+1,j-1) && tmp(i,j)>tmp(i+1,j) && tmp(i,j)>tmp(i+1,j+1)
img_re(i,j)=255;
%标记角点
end
endendimg_re=mat2gray(img_re(2:m+1,2:n+1));figure,imshow(img_re);
%恢复并显示图像
四、直线提取
1.Hough变换原理
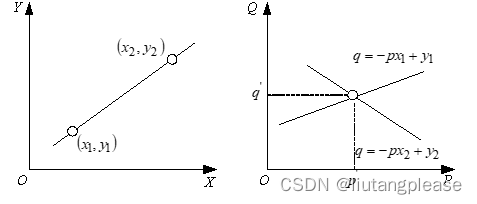
在图像空间XY里,设所有过点(x,y)的直线都满足方程:

式中,p为直线的斜率,q为直线的截距。也可以写成:

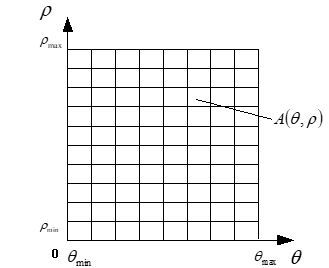
式中表示参数空间PQ中过点(p,q)的一条直线。图像空间到参数空间之间的转换可以用图表示:
2.直线提取原理
开始时,置数组A为零,然后对每一个图像空间中的给定点,让θ取遍区间上所有可能的值,并根据直线公式算出对应的ρ,再根据和的值(设都已经取整)对A累加:

对图像遍历后,上式的值就是在点(θ,ρ)处共线点的个数。值(θ,ρ)也给出了直线方程的参数,这样就得到了点所在的线。
3.MATLAB编程实现
img = imread(rg.bmp');figure(1),subplot(1,2,1);imshow(img); title('原始图像');img=rgb2gray(img);
% 灰度图像subplot(1,2,2);imshow(img); title('灰度图像'); thresh=[0.01,0.10];
%敏感度阈值sigma=3;
%定义高斯参数 f = edge(double(img),'canny',thresh,sigma); %边缘检测figure(2),imshow(f); title('canny 边缘检测'); % 检测函数;[H, theta, rho]= hough(f,'Theta', 20:0.1:75);
%0-1% H->累计数组 , thetaH:对应的θ,实际上H的大小就是Rho×Theta% Rho:H对应的ρ peak=houghpeaks(H,1);
%峰值提取hold on %保留当前的图和特定的坐标轴属性,以便后续的绘图命令添加到现有的图表。lines=houghlines(f,theta,rho,peak);
%得到线段信息 figure(3);imshow(f,[]);title('霍夫变换检测结果');hold on ;for k=1:length(lines)
xy=[lines(k).point1;lines(k).point2];
plot(xy(:,1),xy(:,2),'LineWidth',4,'Color',[.6 .6 .6]); end
相关文章









