






 技术咨询
技术咨询 代买器件
代买器件 商务客服
商务客服 研发客服
研发客服导读:异步电机直接矢量控制需要通过磁链观测器来获取同步角,用于控制过程中的坐标变换。同时,磁链观测器输出的估计磁链用于磁链PI调节器闭环控制。所以磁链观测器在矢量控制中显得尤为重要。
一、矢量控制FOC
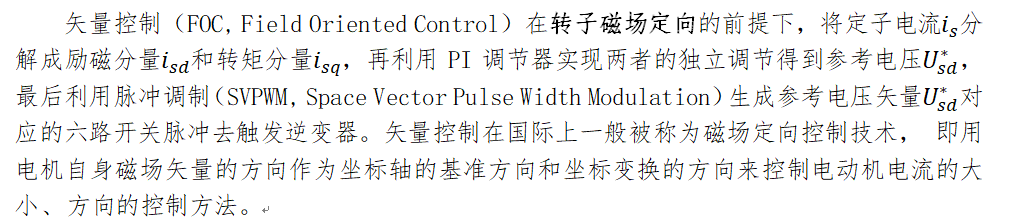

图1-1 异步电机转子磁场定向矢量控制框图
二、全阶磁链观测器
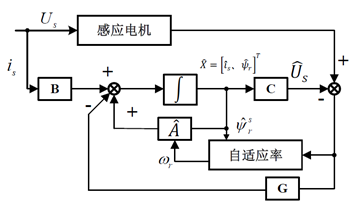
图2-1全阶磁链观测器系统结构框图
全阶磁链观测器的主要思想是将感应电机模型作为参考,把状态估计的方程作为可调节部分。这两部分具有相同物理意义的输出量,利用两个部分的输出量误差再经过反馈校正通道对状态观测值进行修正,使观测值快速地跟踪上实际值。模型参考自适应系统的(Model Reference Adaptive System,MRAS)思想有效地提高了全阶磁链观测器的动态性能和抗扰动性能。
参考异步电机状态方程,全阶磁链观测器模型可以表示为:

三、仿真建模与波形分析
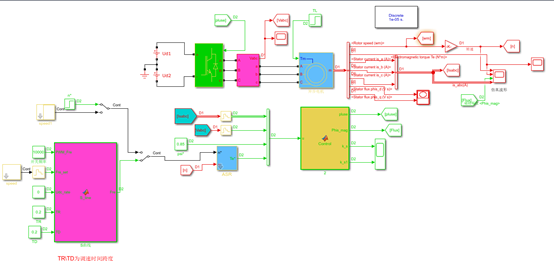
图3-1 基于全阶模型磁链观测器的FOC控制仿真系统

(a)150r/min

(b)1500r/min
图3-2 不同转速下的估计磁链变换情况
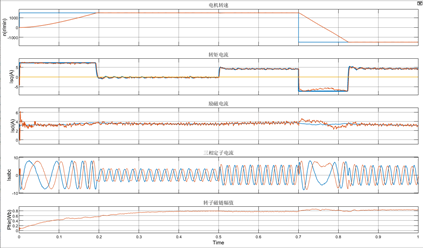
图3-3 基于全阶模型磁链观测器的异步电机FOC控制系统仿真波形(1500r/min)
从图(3-1)和(3-2)可知,全阶磁链观测器在低速和高速区域,实际值都能很好地跟踪上参考值。
四、总结
全阶磁链观测器属于一种闭环磁链观测器,根据MRAS进行误差反馈修正估计值,动态和稳态性能有所提高。全阶磁链观测器的重点在于离散化方法和反馈矩阵的设计,可以保证在全速范围内具有一定的磁链估计精度。
文章来源于:电子工程世界 原文链接
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。
相关文章

控制器与电机如何匹配(2023-10-11)
。
控制器与电机的匹配是非常重要的。在选择控制器时,需要考虑以下几个因素:
1、电机类型:不同类型的电机需要不同的控制器。例如,直流电机需要直流电机控制器,步进电机需要步进电机控制器。
2、电机......

直流伺服电机和交流伺服电机的区别(2023-05-22)
它们的结构复杂,维护难度较大。
需要根据具体的应用需求来选择合适的电机类型,同时还要考虑到控制器和配套设备的匹配问题。
直流伺服电机参数大全
直流伺服电机的型号参数通常包括以下几个方面:
功率:指电机的......

svpwm与动量轮怎么融合 svpwm变频调速原理(2023-10-19)
。最常见的方法是将SVPWM控制器与PID控制器配合使用,实现动量轮转速和转矩的控制。动量轮控制系统的设计需要考虑到多相电机的特性,根据空间矢量模式的模块设置多轴控制......

电机foc是什么意思 svpwm和foc的区别(2023-09-12)
之一。
FOC的工作原理是将电机的电流矢量控制在电机的定子电磁场方向上,使得电机的转矩方向与转子磁场方向一致,从而保证电机输出的旋转力矩最大,运行效率和性能最优。FOC的控制方法将转子的磁场视为一个旋转矢量......

磁通矢量控制和直接转矩控制介绍(2024-07-25)
达到零速满转矩,控制性能十分接近于直流传动。
这里我们为了达到快速的转矩响应和较高的速度精度,反馈装置是必需的。这使得成本上升并且增加了传统交流电机的复杂性。同样,调制器的使用降低了输入的电压和频率信号与电机的......

两相感应伺服电动机的控制方法(2024-08-21)
:这种方法通过调整电流大小和相位来控制电动机转速和转矩。
向量控制方法:这种方法可以将电机的运动状态描述为一个向量,在控制电力电子器件的实际开关信息中进行调节,控制电机的转速和转矩。
无感矢量控制方法......

常见的两相感应伺服电动机控制方法介绍(2023-05-31)
电力电子器件的实际开关信息中进行调节,控制电机的转速和转矩。
4. 无感矢量控制方法(FOC):通过测量转子位置和转速,控制定子电流产生与转子磁场转速相匹配的磁场,并将电动机定子电流向量分解为磁场方向和扭矩方向控制......

标量控制和矢量控制的区别(2023-08-09)
标量控制和矢量控制的区别; 标量控制和矢量控制是电机控制领域中两种不同的控制方法。
标量控制是指控制电机的转速,同时控制转速来间接实现对电机的转矩控制。利用电机等效电路模型,通过调整电机的......

BLDC电机控制算法及矢量控制(2023-03-23)
中的三种霍尔器件用于提供数字信号,它们在60度的扇形区内测量转子位置,并在电机控制器上提供这些信息。由于每次两个绕组上的电流量相等,而第三个绕组上的电流为零,这种方法仅能产生具有六个方向其中之一的电流空间矢量。随着电机的......

一文解析BLDC电机控制算法(2023-08-04)
中的三种霍尔器件用于提供数字信号,它们在60度的扇形区内测量转子位置,并在电机控制器上提供这些信息。由于每次两个绕组上的电流量相等,而第三个绕组上的电流为零,这种方法仅能产生具有六个方向其中之一的电流空间矢量。随着电机的......