AI技术是如何助推新一代传感器大力发展的?
随着智能汽车感知环境的复杂度不断提高,传统传感器已经无法满足更高级别自动驾驶功能与更好人机交互体验感。 从智驾层面来看,感知传感器的性能会影响后续感知融合的精确度,更会影响后续决策规划以及车辆控制。
从智舱层面来看,感知传感器的性能可以实现一些新型的舱内功能,比如手势交互、动态监测等。 在智驾和智舱两个应用场景需求驱动下,一批新型智能传感器陆续面世,相比传统传感器,新一代传感器在性能、效能方面都有了大幅度地提升。
明确定义:新一代传感器在软硬件层面实现能力跃级
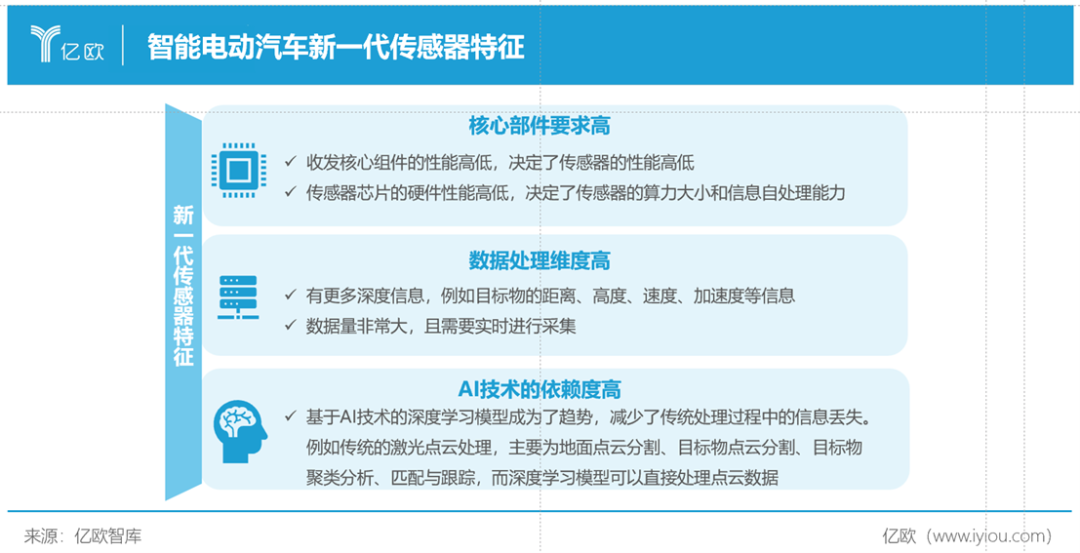
新一代传感器是指在智能驾驶和智能座舱场景中,具备自主学习能力,并且能够支持AI技术处理大规模数据的新一代智能传感器。例如,激光雷达、4D毫米波雷达、3D-ToF摄像头等。 此外,新一代传感器具备三大特征: 第一,核心部件要求高。比如收发核心组件与传感器芯片,它们分别决定了传感器的性能高低以及自身算力大小和信息处理能力。
第二,数据处理维度高。新一代传感器会带来更多维度的深度信息,如目标物的距离、高度、速度等,并且这些信息需要实时采集,数据体量非常大。
第三,AI技术的依赖度高。传统的规则算法无法满足新一代传感器的感知模型需求,而基于AI技术的深度学习模型成为新一代传感器的应用趋势。 综合来看,在软硬件方面,新一代传感器相比传统传感器在多个维度都有了提升和跃级。
新一代传感器产业链:本土供应商占有一席之地
传统感知传感器的核心技术和市场份额基本掌握在国外供应商手中,比如SONY是车载摄像头内置CMOS芯片市场的主导者。 近些年,得益于国内智能汽车大发展的浪潮,新一代传感器的出现为国内本土供应商提供了机遇,无论是传感器整机厂还是上游核心零部件厂商中,都出现本土供应商的影子。
以激光雷达为例,本土激光雷达厂商目前占据了大部分国内市场份额,头部厂商如禾赛科技已在美股上市、速腾聚创也向港交所递交了上市申请。相比而言,国外激光雷达厂商由于技术服务优势不如前者,基本已纷纷退出了中国市场。
再比如4D毫米波雷达,虽然国际Tier1巨头仍然占据了大部分的毫米波雷达市场份额,甚至采埃孚的4D毫米波产品实现了部分车型上车,但国内厂商也开始发力4D毫米波雷达业务,相比国外厂商来说,国内供应商在算法开发应用以及服务层面的优势会更明显。
应用前景:性能优势明显,技术与工程化能力需进一步验证
在智驾和智舱层面,新一代传感器都表现出更优的自身性能和具体应用方面的优势。在智驾层面,相比传统智能传感器,新一代传感器凭借自身性能的优势(如探距能力、恶劣环境适应能力等),能够覆盖更多的长尾场景(Corner Case),从而让行车冗余安全得到更好地提升。
在智舱层面,新一代传感器在DMS/OMS系统的基础功能上,凭借传感器提供的三维信息实现了一些新的功能,比如手势识别、眼球跟踪、安全支付等。 虽然自身性能优势大幅度提升,但新一代传感器仍然处于产品生命周期的成长期。一方面,新一代传感器的技术路线仍未确定,并且存在成本竞争力差、算法开发难度大等挑战。另一方面,由于传感器发展周期较短,主要问题在于工程化方面,比如集成安装难度、外部环境干扰、交付预期差等。因此,新一代传感器仍需要经历一段较长的发展过程。
近期,围绕新一代传感器应用前景的话题讨论尤为激烈,行业从业者较为关注的两个问题是:激光雷达是否只是“装饰品”?4D毫米波雷达是否会替代激光雷达?亿欧智库在报告中通过案头研究、定性访谈以及交叉验证等多种方式相结合的研究方法,也对以上问题做了分析和论证。
首先,激光雷达仍被需要。
一方面,多传感器融合能带来更强的安全冗余;另一方面,激光雷达可以让城区NOA功能的场景复杂度降低。亿欧智库认为,未来激光雷达将主要配置于高端车型或者中端车型的高选配版本,并且在安全作为首要原则的前提下,激光雷达将成为整个自动驾驶系统不可忽视的功能件,而非只是“装饰品”。
其次,4D毫米波雷达与激光雷达不存在替代关系,更多的是互补关系。
从两者性能来看,两种传感器都能提供目标物距离、高度等信息,同时也能输出三维图像信息,但4D毫米波雷达无论是点云密度还是角分辨率都远不如激光雷达。4D毫米波雷达的性能更多的类似于低线数的激光雷达,比如4/8/16线激光雷达。从两者的应用来看,4D毫米波雷达具备目标物穿透识别能力,可以检测到前前车(指在前方车之前的车辆)刹车。 综合来看,激光雷达和4D毫米波雷达会凭借各自的性能优势,各自形成差异化的竞争优势。
结语:新一代传感器更适合未来感知融合趋势,市场规模将逐步提高
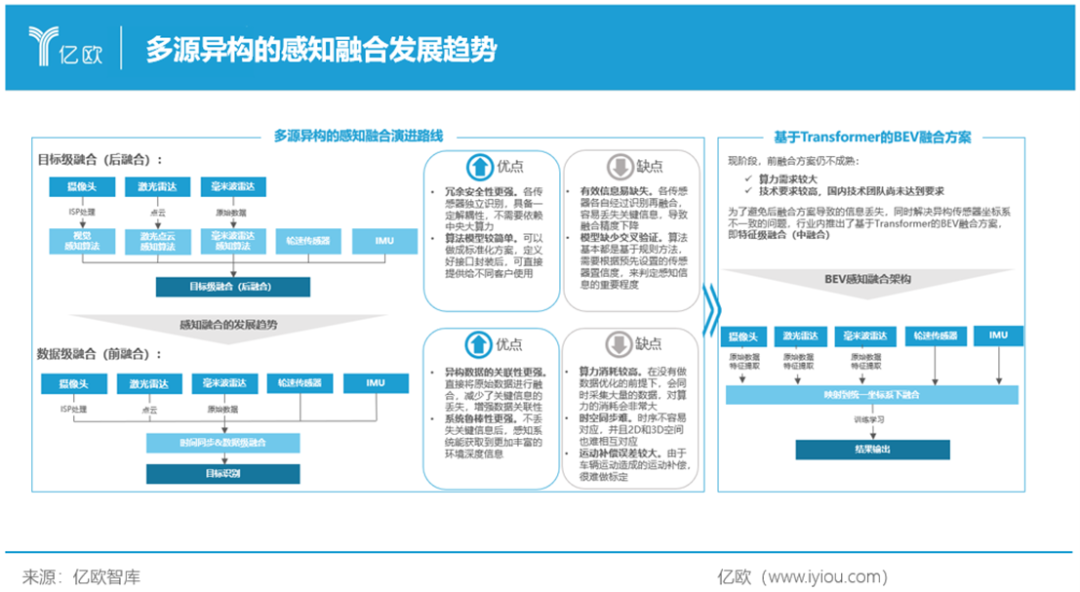
前融合的感知方式是自动驾驶行业的发展趋势,但前融合受限于算力和技术能力,模型落地仍需要较大的验证周期。在这样的背景下,行业内兴起了以BEV+transformer为主的感知融合方案,可以在不丢失各传感器数据信息的情况下,将原始数据的信息进行特征提取,从而一并映射在同一世界坐标系下进行融合,其优势在于最大程度上保证了目标物识别的准确性。
同时,区别于前期二维的图像模型,BEV模型所带来的三维建模方案,能够更好地适配激光雷达、4D毫米波雷达等新一代传感器所采集的三维数据。
未来5年(2023-2025),随着国内搭载城区NOA功能的智能汽车数量不断增加,自动驾驶车辆需要更高性能的传感器来提供更多维度信息,从而保证人机共驾的安全性。同时,城区NOA功能的普及将考验车端的人机交互能力,舱内感知如何提供更安全的预警功能,恰恰需要性能更优的传感器进行支撑。
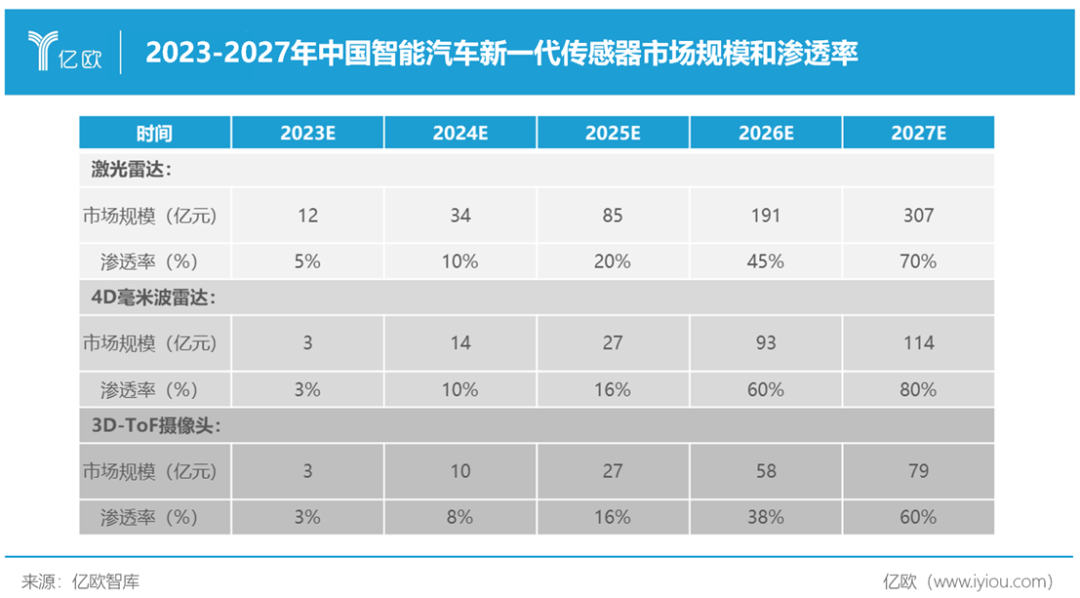
亿欧智库预测,至2027年,国内智能汽车中的车载激光雷达、4D毫米波雷达、3D-ToF摄像头市场规模将分别达到307亿元、114亿元及79亿元。
综上所述,从整个智能汽车产业的发展趋势来看,新一代传感器提供的深度信息更适合大模型的发展方向。此外,舱驾功能的量产升级将有助于推动新一代传感器的市场规模不断攀升。新一代传感器仍需要打磨自身技术,并且在量产上车过程中,仍需要不断克服各类know-how工程化问题。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。