






 技术咨询
技术咨询 代买器件
代买器件 商务客服
商务客服 研发客服
研发客服摘要:本文介绍了可应用于室任锲范ㄎ坏母慕LANDMARC定位系统。该算法在原始算法基础上对RFID标签进行分类,同时引入了参考误差的概念来提高系统定位精度。改进后的算法结合RF code公司硬件设备组建定位系统。实验结果表明,改进后的算法减少了定位时间,提高了室任锲返亩ㄎ痪度。
引言
目前,用于室内定位的技术主要有红外线定位技术、WiFi定位技术、ZigBee定位技术、超宽带定位技术、RFID定位技术等。其中RFID定位技术具有非视距传播、传输范围大、读写速度快、安全性高等优点,相比其他定位技术,更适合用于室内物品的定位、追踪。
1 RFID技术简介
RFID是一种利用射频信号通过空间耦合(电感或电磁耦合)实现无接触的信息传输手段,它通过射频信号自动识别目标对象并获取相关数据,可工作于各种恶劣环境,并可同时识别多个标签,操作快捷方便。
2 LANDMARC系统
为了增加室内系统定位精确性而不增加阅读器数量,LANDMARC系统引入了位置固定的参考标签来辅助定位。系统结构如图1所示,其中包括4个RF阅读器、49个参考标签和9个待定位标签。

LANDMARC定位技术采用了在统计学上称为“最近邻居”的思想,选择了k个信号强度值与待定位标签相近的参考标签,利用加权算法,计算待定位标签的坐标。算法过程如下。
假设有n个RF阅读器,m个参考标签,u个待跟踪标签。定义跟踪标签p的信号强度矢量为:Tp=(T1,T2,…,Ti,…,Tn)T。其中Ti表示阅读器i感知到的跟踪标签的信号强度,i∈(1,n)。定义参考标签q的信号强度矢量为:Rq=(R1,R2,…,Ri,…,Rn)。其中,R1表示参考标签i的信号强度。跟踪标签p和参考标签q的欧几里得距离(D):为:

通过比较D中各分量的值,找出跟踪标签p的k个最近邻居,称这种方法为k-最近邻算法。其他u-1跟踪标签用同样的方法找出k个最近邻居。跟踪标签坐标(x,y)可以按下式计算:

3 改进的LANDMARC系统
3.1 改进的LANDMARC系统算法
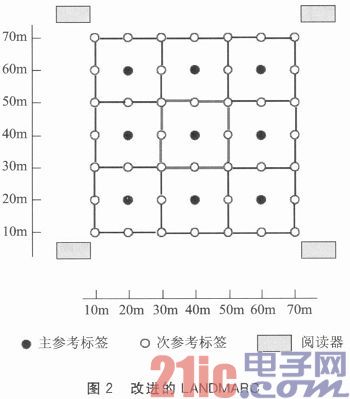
图2表示算法改进后的标签布局。改进算法引入标签分层的概念,将定位区域分为若干个小的定位子区域(Sub Location Area)。每个子区域由1个主参考标签(Primary Reference Tag)图2中灰色圆点和8个相邻的次参考标签(Secondary Reference Tag,图2中白色圆点)组成。改进算法中,分层结构可以根据实际跟踪标签数量作具体调整。
算法具体定位过程可以分为如下4个步骤:
①确定跟踪标签所在的定位子区域。假设有p个主参考标签,由式(1)、(2)计算跟踪标签和主参考标签之间的距离矢量D=(D1,D2,…,Dp),对D中各分量排序,最小欧式距离对应的主参考标签所在区域就是所求的定位子区域。
②每一个定位子区域可以进一步分成4个定位区域,如图3所示。

假设在式(1)中确定的主参考标签为PTk,选取PTk周围相邻的8个次参考标签,计算8个次参考标签和跟踪标签之间的欧氏距离,选出距离跟踪标签最近的次参考标签ST1。在剩余的7个次参考标签中选出与跟踪标签次近的次参考标签,同时这个标签必须是ST1的两个相邻的标签之一。这样确定了1个主参考标签和2个相邻的次参考标签,也就确定跟踪标签所在的矩形区域。由上述定位步骤可知,这个矩形区域由1个主参考标签PTk和3个相邻的次参考标签(ST1、ST2、ST3)组成。
③使用k-最近邻算法和加权算法计算跟踪标签的位置。这里式(3)中k=4时:

改进算法把参考标签分为主参考标签和次参考标签这两层,逐层搜索跟踪标签的最近邻居,实现快速定位。
④为了进一步减小改进算法的定位误差,提高定位精度,引入修正误差向量的概念。通常情况下,跟踪标签和最近邻居距离不超过1 m,因此可以近似认为两者定位误差向量相同。可以用它修正式(5)计算得到的跟踪标签坐标。
为了计算修正误差,首先需要确定距离跟踪标签最近的参考标签,称为关键参考标签(Key Reference Tag,KT)。比较主参考标签PTk和3个相邻的次参考标签(ST1、ST2、ST3)到跟踪标签的欧式距离,选出关键参考标签。利用式(2)~(4)计算得到KT的计算坐标(p’,q’),已知KT的真实坐标为(p,q),因此可以得到KT的定位误差向量:

3.2 改进的LANDMARC系统硬件
改进算法选择RF Code公司的M100标签和M250阅读器。M100标签实物如图4所示。

M100属于有源标签,其典型传输范围为90m,工作频率为433.92 MHz。M100标签中安装了防拆开关,因此较适合用于物品的跟踪。在低速状态下,标签电池寿命可达5~7年之久。
M250阅读器实物如图5所示。M250阅读器直接提供射频信号强度值,可以同时监视1400个信标速率为10 s的标签。

M250阅读器有多种接口形式传输数据,可通过USB口、有线以太网接口,也可使用阅读器内部集成的802.11b/g无线网卡。阅读器支持加密连接(HTTPS和SSH),并支持以太网供电(PoE)RF Code M250阅读器产品接口如图6所示。

实验中,将M250阅读器以太网接口连接到路由器的LAN口,采用TCP/IP协议传输数据。路由器把所有标签的信号强度数据通过网络转发到后台处理计算机上。计算机端编程实现RFID定位管理平台,可通过Internet获取标签数据,实现节点的远程控制和管理,并进行定位参数设置、数据处理、定位结果显示。定位平台基于.NET Framework 4.0,采用C#编程语言实现。基于.NET Framework 4.0的定位管理平台如图7所示。

4 实验和讨论
图8展示了10次实验,系统分别应用两种算法得到的误差比较图。在第5次实验中,原始算法误差为0.97 m,改进算法误差为0.65 m,改进算法定位误差减少32.7%。另外,在其余各次实验中,改进算法也均有10%以上的精度提高,改进算法的定位精度整体高于原始算法。两种算法误差比较如图8所示。

改进算法利用参考误差修正跟踪标签的计算坐标,抵消了部分环境因素对定位精度产生的干扰,使得改进算法的定位精度优于原始算法。
结语
本文在讨论RFID技术和LANDMARC算法的基础上,提出了参考标签的分层结构,并引入参考误差的概念用于改进原始算法,通过实验证明改进算法具有更快的定位速度和更高的定位准度,可广泛应用于室内物品的定位和管理,具有一定的研究和实际应用价值。