






 技术咨询
技术咨询 代买器件
代买器件 商务客服
商务客服 研发客服
研发客服这两天,RoboTaxi(无人驾驶出租车)开启了神仙打架模式:一面是“萝卜快跑”在武汉爆火,另一面特斯拉继续跳票,将计划中的RoboTaxi发布会从8月推迟到10月,市值一夜狂跌5000亿元。
大家还记得当年百度CEO李彦宏在五环上首秀的无人驾驶技术吗?当年还被交警调查的无人驾驶,如今已经成为了正式的商业项目,不算违反交规了。
这不禁让人好奇,背后究竟有何技术?今天我们就来梳理一下萝卜快跑以及其背后的百度Apollo。
萝卜快跑和Apollo智驾是什么关系?
Apollo智驾和萝卜快跑是百度在自动驾驶领域的两个关键项目,它们之间有密切的关系,但侧重点有所不同。
Apollo智驾
Apollo智驾是百度的自动驾驶技术平台,涵盖了自动驾驶车辆的研发、测试和部署。它提供了一整套开源的自动驾驶解决方案,支持包括感知、决策、规划、控制在内的各个自动驾驶功能模块。Apollo平台旨在推动自动驾驶技术的发展,并与汽车制造商、供应商和其他合作伙伴共同构建一个开放的自动驾驶生态系统。
萝卜快跑
萝卜快跑(Apollo Go)是百度基于Apollo智驾平台推出的自动驾驶出行服务。萝卜快跑主要面向普通消费者,提供无人驾驶出租车(Robotaxi)服务。这项服务已经在多个城市上线,包括北京、上海、广州、重庆等地,用户可以通过移动应用预约和使用无人驾驶出租车。
“萝卜快跑”在武汉推出了全天候24小时运营的服务,百度的无人驾驶车队已经扩展到300辆全无人驾驶车辆,并且运营区域扩大到3000平方公里,覆盖了武汉市一半的人口。这种大规模的部署和广泛的覆盖范围,显著提升了服务的可用性和便利性。
通过不断的技术创新,萝卜快跑提升了无人驾驶技术的安全性和可靠性。到2024年4月,Apollo Go已经安全行驶了超过1亿公里,没有发生重大事故 (Enterprise Technology News and Analysis)。这不仅展示了技术的成熟度,也提升了公众对无人驾驶服务的信任。
关系和区别
技术基础:萝卜快跑的技术基础源自Apollo智驾平台。Apollo提供了自动驾驶所需的核心技术和解决方案,而萝卜快跑则将这些技术应用于实际的出行服务中。
应用场景:Apollo智驾主要聚焦于技术研发和生态系统建设,服务于研发人员和企业。萝卜快跑则面向终端消费者,提供实际的无人驾驶出行服务。
目标:Apollo智驾旨在推动自动驾驶技术的发展和普及,建立开放的合作平台。萝卜快跑的目标是提供安全、高效、便捷的无人驾驶出行服务,提升用户的出行体验。
总结来说,Apollo智驾是百度自动驾驶技术的核心平台,而萝卜快跑是基于该平台的实际应用服务,它们相辅相成,共同推动百度在自动驾驶领域的发展。
Apollo智驾发展历程
百度Apollo有三条商业模式,分别为为主机厂商提供自动驾驶解决方案、百度造车、无人驾驶出租车。
(1)为主机厂商提供自动驾驶解决方案:百度基于长时间的AI技术积累以及大数据分析,为主机厂提供完备的9种解决方案:共享无人车解决方案、Minbus自动驾驶解决方案、Valet Parking自动驾驶解决方案、智能信控智能交通解决方案、车路协同智能交通解决方案、小度车载OS车联网解决方案、车联网智能车云解决方案、5G云代驾服务解决方案、Apollo Air计划。为多家主机厂商赋能,打造全球最大的自动驾驶生态。
(2)百度造车:百度与吉利合资创立集度汽车,百度占股55%,拥有3/5的董事会席位,预计未来五年计划投资规模约500亿元,核心团队200人,预计2022年最大扩大至3000人。集度汽车计划将Apollo智能驾驶技术与电动造车浩瀚SEA智能进化体验框架相结合,开发L4级别自动驾驶框架JET,预计每年都会基于该框架向市场投放一款新车。
(3)无人驾驶出租车:百度基于Apollo平台,通过车、路、云、图四个领域核心技术,占据先发优势,目前已经是国内布局最早、专利最多、财力最雄厚的Robotaxi公司,预计2023年将业务开放至30个城市,部署3000辆车,获得300万用户,实现区域内可循环商业模式。

Apollo平台发展历程:
Apollo 1.0(2017年4月):提供基础架构和功能模块,主要应用于封闭场景。
Apollo 2.0(2017年12月):支持城市道路和高速公路的自动驾驶能力。
Apollo 3.0(2018年7月):实现车路协同,并开始商业化试点运营。
Apollo 3.5(2018年12月):增强复杂城市环境中的自动驾驶能力。
Apollo 4.0(2019年7月):覆盖全场景并采用多层次安全冗余设计。
Apollo 5.0(2020年6月):规模化部署和测试。
Apollo 6.0(2021年12月):商业化运营无人驾驶出租车。
Apollo 7.0(2022年7月):引入深度学习模型和Apollo Studio在线开发平台。
Apollo 8.0(2023年1月):提供可扩展的软件框架和升级仿真服务。
Apollo 9.0(2023年12月):优化软件框架接口,升级检测模型和引入增量训练方法。
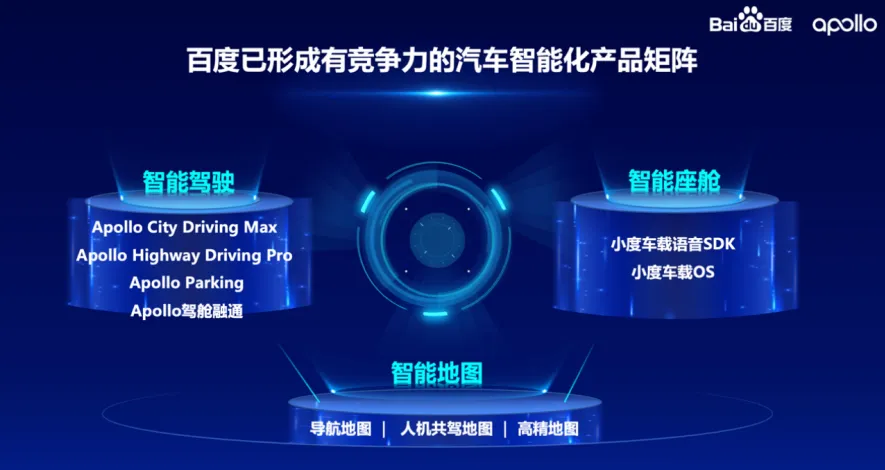
作为一家新型、专业、本土的Tier 1,百度智能汽车事业部已形成有竞争 力的、覆盖“驾、舱、图”的完善的汽车智能化产品矩阵,能够满足国内外车 企对汽车智能化的各种需求,助力车企打造面向未来的智能汽车。
智驾方面,百度先后推出了自主泊车Apollo Parking、行泊一体领航辅 助驾驶Apollo Highway Driving Pro、城市域领航辅助驾驶Apollo City Driving Max等覆盖低、中、高组合的全系列智驾产品,目前已在多款明星车型上实 现量产;
智舱方面,百度推出行业领先的智能座舱解决方案,包括小度车载OS, 小度车载语音SDK;
驾舱融通方面,百度也在和车企共创驾舱融通的解决方案;
智图方面,为车企提供车载导航地图、高精地图和人机共驾地图等产品。
目前,百度汽车智能化解决方案已获得广泛认可,在31个汽车品牌的134 个车型上实现量产,累计搭载超700万辆。

百度Apollo具体的逻辑层面如下:
功能层:通过交互逻辑(包括HMI和状态机等)的定制,可以实现相关 功能的优化定制体验。此外,车企还可以根据百度提供的算法原子化能力,自 行开发跨领域功能,例如魔毯功能,灵活满足不同车企的需求。
决策规划:为满足车企对用户体验的极致追求,百度提供多达12个大 类、接近50种产品标定参数,让车企能以便捷的方式自定义智驾产品效果, 从而更好地配置驾驶风格。
车辆控制:车企可根据自身情况,在解决方案中选择按接口要求集成自 研的车辆控制模块。
底软层:提供统一的计算加速服务接口,在智驾算法和芯片平台选型间 解耦。
硬件层:方案支持多种传感器组合,车企可自主平衡性价比,选择最适 合自己的硬件方案。
数据闭环:可支持车企配置个性化的数据收集及算法策略。

硬件开发平台支持包括计算、传感器、远程云、驱动等等合作伙伴支持。
萝卜快跑才是真正的火出圈
接下来聊聊萝卜快跑。
Robotaxi作为自动驾驶商业化落地重要场景,是基于高效、安全 出行服务提供的自动驾驶全域生态。其商业化需要规模化出行服务运营能力。Robotaxi 服务运营成功除了流量、运营、体验、调度、服务等要素,自动驾驶相关政策的完善是自动驾驶无人车大规模商业化落 地的前提,用户习惯的培养,市场参与者的多寡影响规模效应的形成,自动驾驶成本决定了 Robotaxi 产品的市场竞争力,技术成熟度决定了自动驾驶车辆是否安全、便利及消费者对自动驾驶服务的接受度。
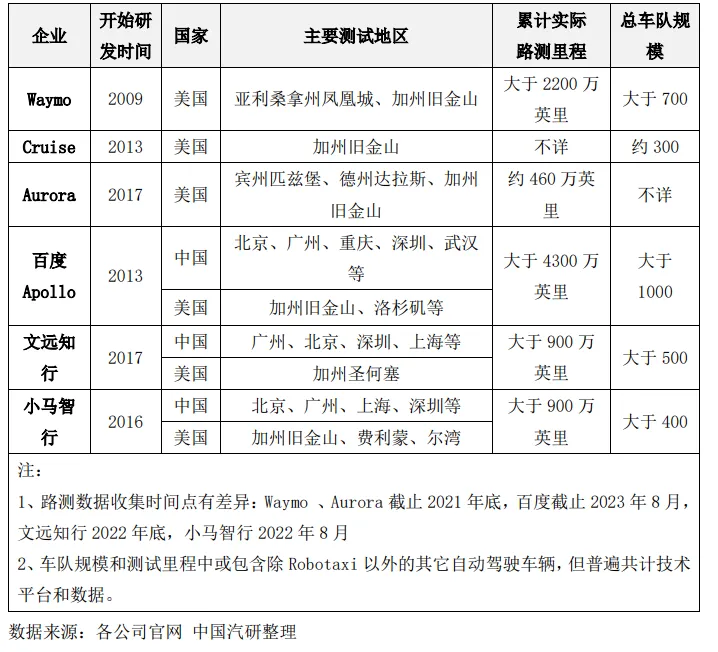
盘点百度的自动驾驶历年车型:







十年深耕,百度自动驾驶比人类驾驶更安全
2024年5月,百度Apollo发布了全球首个支持L4级自动驾驶的大模型Apollo ADFM(Autonomous Driving Foundation Model),同时上新了搭载百度第六代智能化系统解决方案、价格仅20万元的萝卜快跑第六代无人车。
百度Apollo ADFM基于大模型技术重构自动驾驶,可以兼顾技术的安全性和泛化性,做到安全性高于人类驾驶员10倍以上,实现城市级全域复杂场景覆盖。正是依靠自动驾驶大模型的应用实践️,百度萝卜快跑已经攻克了武汉的复杂道路场景,实现了武汉城市全域、全时空场景覆盖,为近半数的武汉市民提供便捷的无人化出行服务。同时在L2+智能驾驶领域,目前国内唯一的纯视觉城市领航辅助驾驶产品ANP3也将全面应用自动驾驶大模型Apollo ADFM,焕新升级为ASD(Apollo Self-Driving),即将在极越全系车型量产首发,率先实现智驾全国都能开、有百度地图的地方都能开。
百度自动驾驶技术部总经理徐宝强表示:“以自动驾驶大模型为基础,面对一座新的城市,完成全域全自动驾驶出行服务准备仅需半年时间。未来,这个验证时间还将进一步缩短。”
搭载百度Apollo第六代自动驾驶系统解决方案的萝卜快跑无人车,全面应用了“百度Apollo ADFM大模型+硬件产品+安全架构”的方案,该方案通过10重安全冗余方案、6重MRC安全策略确保车辆稳定可靠,安全水平接近国产大飞机C919。
萝卜快跑第六代无人车配备的车规级高算力主冗双计算单元,算力可达1200Tops。全车38个传感器深度融合,实现远中近三重检测能力全覆盖,具有更精准感知能力。同时,具备架构冗余、计算单元冗余、制动系统冗余等七重全冗余系统,任何单一零部件或系统失效,备用的冗余系统都可以瞬时完成补位;软件上,搭载了整车+智能驾驶系统一体的故障诊断及风险降级体系。
在5月的发布会上,百度还介绍了端到端的无人驾驶技术,也有可能会在萝卜快跑中使用。其端到端架构属于两段式端到端,感知和决策规划有两段网络,后续通过隐形传递和联合训练实现端到端无人驾驶。
在感知端,通过摄像头得到视觉图像数据,并通过激光雷达和4D毫米波雷达得到主动光传感器数据。然后利用感知网络对视觉和主动光特征进行识别,融合BEV特征判断道路特征、障碍物等。最后再通过显式三维向量空间(使用三维坐标系来精确地表示物体的位置和方向)和隐式BEV特征(在BEV视角下,不直接给出三维空间中的所有信息,而是通过一些间接的方式,如特征编码或者深度学习模型来隐式地表示和推断这些信息),以联合训练的方式实现端到端无人驾驶。
截至2024年4月,百度Apollo的自动驾驶里程已经超过1亿公里,但从未发生过重大伤亡事故。但过去两年的数据显示,实际车辆出险率仅为人类司机的1/14。
市场化探索
用户和市场是检验技术的唯一标准,2021年百度萝卜快跑开始市场化的探索,实践中建立起全球最大的无人车自动运营网络,可以实现全流程的全局监控,包括自动整备、风险预警、自动OTA、远控车窗等超过30项全自动管理单元。
搭载百度Apollo第六代智能化系统解决方案的萝卜快跑第六代无人车,整车成本相较于5代车直接下降60%,价格只需要20万,再次刷新了行业纪录。
王云鹏表示,百度和车企合作伙伴将持续思考和定义无人车,目标是每一代产品成本下降一半、能力提升10倍。
写在最后
百度通过萝卜快跑和Apollo智驾在无人驾驶技术领域取得了显著进展。也让L4级别的无人驾驶,得到更广泛的市场检验与认可。至少从目前来看,大家对科技的需求是非常热烈的。