今全球汽车产业面临前所未有的百年变局,在国家“双碳”目标指引下,中国汽车产业正在向着电动化、智能化和网联化(简称“三化”) 快速发展,辅助驾驶和自动驾驶技术大量涌现。线控底盘技术作为支撑实现辅助驾驶和自动驾驶的关键基础技术,也是被行业公认的“卡脖子”技术,亟需突破解决。因此,线控底盘技术已成为商用车行业技术的研发热点。
本文重点对近年来商用车线控底盘技术的研究及应用情况进行分析,从线控执行系统和线控集成控制技术两方面展开,其中线控执行系统包括线控转向技术、线控制动技术、线控悬架技术、线控驱动技术和线控换挡技术;线控集成控制技术主要围绕AEB 系统、ACC 系统和LKA系统分析,最后结合《智能网联汽车技术路线图2.0》和《智能底盘技术路线图框架》对商用车线控底盘技术发展趋势进行展望。
1 线控执行系统的研究进展
1.1 线控转向技术
相对乘用车而言,商用车转向技术需要克服重载、长轴距及多轴转向等难题。目前,商用车转向系统的主要功能是提供转向助力,而转向助力随速调节、自动回正、主动转向控制及助力模式自主调节等先进功能还处在研发试装阶段,未大批量应用。商用车转向助力是以液压助力为主,而它面临许多问题需要解决:(1) 由于存在高压油路,会产生噪声。(2) 无论整车是否转向,液压泵都随发动机转动而转动,从溢流阀溢出的流量所产生的能量损失较多,约占转向系统总能耗的40%以上。(3)助力特性不可调节,驾驶体验差。(4) 无电控/线控功能。随着电控化和智能化技术的发展,商用车转向系统正向电控转向技术和线控转向技术方向转变。由于电控转向能实现辅助驾驶和自动驾驶需求的主动转向功能,具备线控属性,所以为了便于分析,这里不再严格区分电控转向和线控转向技术,统一称为线控转向技术,后面其它技术类同。目前,商用车线控转向技术主要包括电液耦合转向(Electro-Hydraulic Coupling Steering,EHCS) 系统、电动液压助力转向(Electro-Hydraulic Power Steering,EHPS) 系统、电动助力转向(Electric Power Steering,EPS) 系统、后桥主动电控液压转向系统(Rear-axle Active Electro-Hydraulic Steering,RAS) 及其它新构型转向器技术等。这些新型商用车电控转向系统不仅解决了传统液压助力转向系统的固有缺点,而且明显改善了整车转向性能,具备主动控制功能,从而提升了驾驶安全和驾驶体验。
1.1.1 电液耦合转向系统
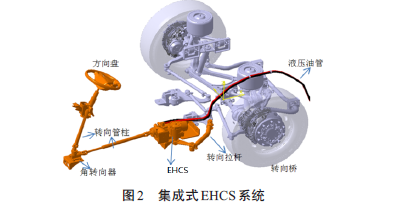
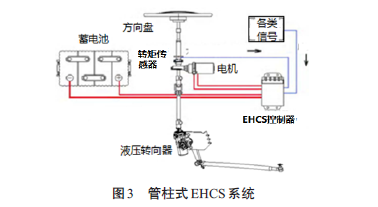
商用车EHCS 系统将传统液压助力和电机助力相结合,提供转向助力随速调节、自动转向回正、抗侧风主动修正、主动转向控制及助力模式自主调节等功能。国外对于商用车管柱式EHCS 系统的研究起步较早,企业和研究机构从系统的机械结构到控制策略提出了各自不同的技术方案,产品的功能及性能都取得了很大进步,一些EHCS 产品已经得到应用。ROTHHMEL 等 开发了商用车EHCS 系统,它能通过实时分析车速与方向盘转角/转速变化关系及趋势,预测危险情况并及时提醒和主动修正转向,以降低货车在转弯等工况下的侧翻事故风险。德国ZF 公司开发了一款可以满足重型商用车的EHCS 系统Servotwin,它将传统的循环球液压转向系统与电机驱动装置及控制单元集成到一起,并在奔驰新一代电动客车上标配应用,实现了L2级及以上的驾驶辅助应用。沃尔沃的动态转向技术(Volvo Dynamic Steering) 将传统液压助力转向与安装在转向器输入轴上的电机及减速机构相结合,能够提供更精确的转向和主动安全控制功能,如预先防止打滑、车道保持及稳定辅助。该电机与液压助力转向器一同工作,并由ECU进行每秒2 000次的转向微调,实现转向主动控制功能,该系统已在沃尔沃FH、FM 和FMX 系列货车上推广应用。Tedrive Steering 公司研制的智能辅助液压转向系统iHSA,如图1 所示, 是由液压转向(Hydraulic Power Steering,HPS) 和电机组合而成,支持原车HPS 系统的接口接入。该EHCS 系统适用于轻型货车、中型货车、重型货车以及中型客车和大型客车,其将iHSA 与循环球转向器结合,能够实现车道保持辅助、侧风补偿、主动回正等功能[3]。国内关于EHCS 系统的研究已经进入小批量试装阶段,清华大学、吉林大学等高校进行了相关控制策略的研究。作者团队率先与国内转向器零部件厂商合作进行了EHCS技术的研发及小批量应用。2015年8月29日,安装了由本团队研发的EHCS 系统的无人驾驶大型客车,在河南省郑州市郑开大道上成功完成全球首次全开放道路示范。与某转向器厂合作研发的集成式EHCS 系统,如图2所示,并实现了在L3级自动驾驶客车上的小批量应用;与某转向器厂合作开发的管柱式EHCS 系统,如图3所示,并实现了在11~12 m客旅车型上的小批量应用。装车试验结果表明,EHCS 系统能明显改善驾驶轻便性和高速稳定性, 并支撑实现车道保持等高级驾驶辅助系统(Advanced Driving Assistance System,ADAS) 功能,有效提升行驶安全性和客户驾驶体验。

1.1.2 电动液压助力转向系统
随着新能源商用车(公交、物流、环卫等) 的迅速发展,传统液压转向系统液压泵的动力源由发动机转变为电机,车上的高压电池系统使应用大功率电动泵成为可能。这里的EHPS 系统就是指应用了大功率电动泵的液压助力转向系统。
目前,电动泵的研究主要围绕电机匹配、双源供电设计及变流量控制等方面。吴浩等根据某款电动客车转向助力的需求,匹配设计了油泵电机的额定工作转矩、峰值工作转矩和额定工作转速,开发了电动泵总成的高压上电和下电策略、转速控制策略和故障处理策略,并通过台架试验验证了该电动泵总成参数匹配的合理性和控制策略的可行性。陈运来等研究了8m电动客车用电动泵的参数(最大流量、最大工作压力、转向泵排量等) 特性对转向舒适性、稳定性和能耗的影响,对电动泵和转向控制器进行匹配设计,并进行实车试验。欧鹏飞开发了一种满足商用车的双电机转向系统,对其助力控制、回正控制、阻尼控制及控制逻辑进行了研究,并进行了联合仿真验证。结果表明:转向综合得分94分,完全能满足商用车的转向需求。胡其丰等提出了一种机电双源转向系统,采用电驱动和机械驱动相结合的方式,其中电驱动是通过车载高压储能单元供电至电机控制器,通过控制器驱动电机,实现负载的驱动;机械驱动是通过与传动轴机械连接的机械油泵输出液压能,通过液压阀的切换输入至液压电机来驱动负载,并设计了相应的控制策略。袁晓伟等通过采集整车的车速、手制动状态、挡位状态、转角等参数,分析车辆转向等状态,调整转向泵电机的转速和流量,以减少转向泵的耗电量。
转向电动泵变流量控制的目的,是实现不同行驶工况下提供不同的流量,既满足低速转向轻便、高速转向沉稳的需求,又避免流量卸荷导致的能量消耗。利用电机的转速可调节特性,实现最优转向助力特性。韩艾呈 根据车速、方向盘转角等信息来计算目标转矩,通过开发矢量控制算法实现电机的目标转速精准控制,满足汽车在不同行驶工况下对转向助力的需求。张念忠设计了一种新能源商用车的电控转向系统,采用滑模控制与永磁同步电机矢量控制技术,验证了转速控制及转矩控制模式下的转向性能。在控制策略方面, 赵万忠等开发了适用于新能源商用车的转向助力控制策略,即一种模糊自整定转向助力算法,以转角和转速为控制信号,采用模糊PID 和实时小波去噪法,设计了基于实时小波去噪算法的助力电机电流跟踪控制算法。闫鹏鹏在某电动客车电动液压转向的基础上,增加方向盘转角传感器,建立了电动机转速与转向助力矩的关系,设计了方向盘理想操纵力矩曲线,实现助力液压泵驱动电机的调速控制,从而节约电能消耗,改善助力性能,提高转向操控性能。
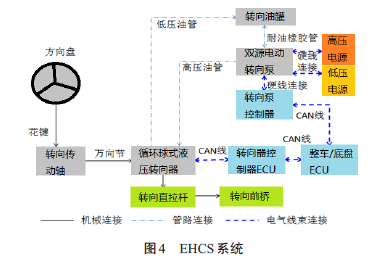
随着国家对新能源汽车安全质量重视程度的提升,2020年5月12日发布了强制性国家标准《GB38032—2020 电动客车安全要求》,其中4.5.2条增加了行驶中助力系统控制要求,即车辆行驶过程中,当整车出现断B级高压电的异常情况时,在车速大于5 km/h 时应保持转向系统维持助力状态或至少保持转向助力状态30 s。因此,目前电动客车电动泵多采用双源供电控制模式来满足法规要求。其它电动商用车按照《GB 18384—2020 电动汽车安全要求》执行。商用车EHCS 系统组成,如图4所示。
1.1.3 电动助力转向系统
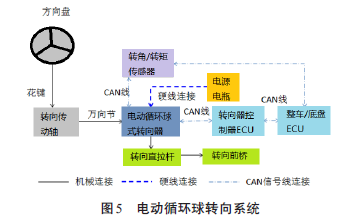
轻型商用车电动助力转向系统(Electric Power Steering,EPS) 多采用电动循环球转向器,它相比EHCS 系统和EHPS 系统省去了液压泵/电动液压泵、储油罐和油管等零部件,具有系统简单、质量减轻、响应快、控制精准等优点。转向助力由原来的液压助力转变为电机助力,控制器直接控制电机产生助力。在驾驶员转动方向盘时,传感器将转角和转矩信号传递给控制器,控制器接收转角转矩信号等信息后,通过计算,输出控制信号,控制电机产生助力。在方向盘不转动时,转向助力控制单元不发出信号,助力电机不工作。常见电动循环球转向系统组成如图5所示。
由于目前技术成熟的电动循环球转向器输出转矩有限,难以满足中、重型商用车转向助力的需求,所以电动循环球转向器多数应用在轻型商用车上。对于新能源商用车产品而言,电机用电需求可以解决,再加上取消液压系统及电动泵等优点,所以轻型新能源商用车已普遍用电动循环球转向器替代了传统的电动液压转向器。对于中、重型新能源商用车,目前行业研发的热点是大推力的电动循环球技术,难点是如何提高电动循环球的可靠性,以满足中、重型商用车的使用需求。采埃孚TRW公司研发了商用车EPS 系统,并在中、重型货车上进行了试装研究。为解决传统商用车供电不足的问题,DIU 等提出了一种混合转向系统,通过传感器信号判断,当低速转向时采用EPS 系统,当高速转向时采用EHCS 系统,性能提升的同时又降低了能耗。国内图4 EHCS系统 方面,2015年,曹艳玲等利用助力电机电流的上下层控制策略,确定了以载重量和车速信号关联助力系数的系统控制方案,并开发了模糊决策控制的客车电动助力转向系统。2017年,舒智对电动循环球转向器的电枢电流进行了闭环控制研究,设计了助力、回正、阻尼等工况模式下的控制器,构建了上、下两层的控制策略,下层利用直线型助力特性曲线确定目标电流,上层选择电机控制确定实际电流,从而消除了两者的偏差。试验结果表明,所设计的控制系统提高了操纵稳定性和转向回正性能,基本消除了残余角。2020年,魏娟等基于LuGre 摩擦模型建立了摩擦状态观测器,得到了摩擦补偿叠加电流,补偿了系统内的损失,然后采用联合仿真方式验证了电动循环球转向控制系统的有效性:所设计的转向电流控制系统能综合车辆行驶时的摩擦、车速和转向盘转角等信息,从而更准确地实现驾驶员的驾驶意图,使车辆转向回正特性更加平稳。2021年马相飞等推导了商用车用循环球式电动助力转向系统主要模块的数学模型,对电动机的电流环采用模糊PID控制策略,提高了电动转向系统的稳定性。
1.1.4 直拉杆式电动转向系统
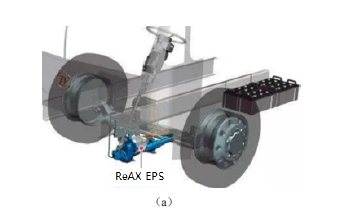
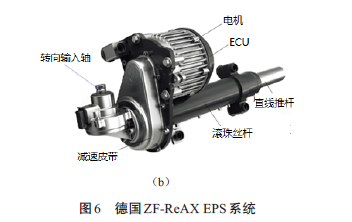
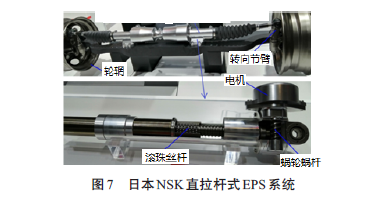
直拉杆式电动转向系统是一种新型商用车电动转向系统,它由电机通过减速机构带动滚珠丝杆实现直拉杆的直线伸缩,同时直拉杆与转向节相连接,带动车轮实现转向功能。目前已完成样机研发的零部件厂商有德国ZF 和日本NSK。国内厂商有中国公路车辆机械厂,并在某公交车上进行了性能验证。2018年6月26日,在德国采埃孚科技日期间,德国ZF 展示了全球首款全电动商用车转向器样机ReAX EPS 系统,如图6所示,开辟了电动货车和电动客车自动化发展的新道路。2021年4月22日,日本NSK 在上海车展上展示了应用于商用车转向的直拉杆式EPS 系统,如图7所示,它采用“电机+涡轮蜗杆+滚珠丝杠”的技术方案,实现了大转向力矩输出和精准控制,能满足商用车电动转向负载需求。综上可知,直拉杆式电动转向技术是商用车下一代EPS 系统的重要技术路线。
1.1.5 后桥主动电控液压转向系统
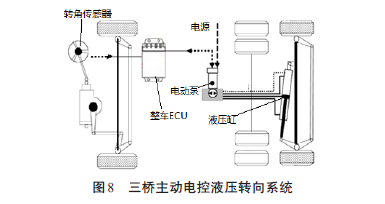
目前,传统的3轴客车尤其是14 m大型客车及15 m 大型公交车,其第3 桥的转向普遍是随动转向,是通过第1桥转向引起的侧向力被动产生的转向,容易出现轮胎异常磨损和转弯半径大、通过性差等问题。为解决这些问题,近年来出现了后桥主动电控液压转向系统,如图8所示。它主要由独立的电动液压泵、电控单元及液压作动油缸组成,根据方向盘的转角信号和第3 桥的作动油缸位移信号,通过整车控制计算出目标转角,输出对应的控制电信号,实现第1桥和第3桥转向的联动,保证整车较为理想的转向阿克曼关系,实现车轮纯滚动,明显改善轮胎异常滑动导致的磨损;同时通过主动推动实现3桥的转角增加,从而减少整车的转弯半径,提高整车通过性。德国BOSCH最新研制的三桥主动电控液压转向器如图9所示,在海外某款三轴公交车上得到批量应用。

1.1.6 其它新型电动转向系统
目前,国内外高校和厂商面向商用车电动转向大转矩需求也研发了不少新构型的电动转向器,为商用车电动转向技术发展提供了新思路。
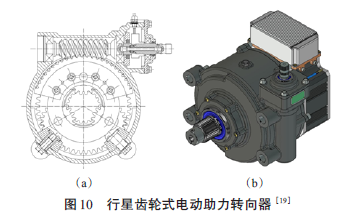
(1) 行星齿轮式电动转向器
它由助力电机、圆柱齿轮减速机构、行星齿轮减速机构、蜗轮蜗杆减速机构、壳体和摇臂输出轴等主要零部件组成。采用行星齿轮减速机构和圆柱齿轮减速机构的组合结构来对助力电机的动力输出进行减速增扭,实现大转矩;利用蜗轮蜗杆传动机构来传递方向盘的操控扭力及车轮转向阻力负载的逆向反馈。行星齿轮式电动转向器的剖视图,如图10 a 所示;样机的外形图,如图10 b 所示。
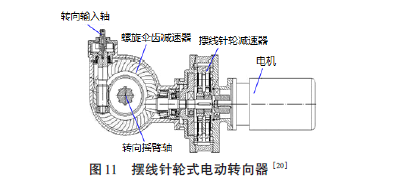
(2) 摆线针轮式电动转向器
如图11 所示, 摆线针轮式电动转向器由电机、摆线针轮减速器和螺旋伞齿减速器等组成,电机通过摆线针轮减速器与螺旋伞齿减速器连接,转向输入轴与螺旋伞齿减速器连接。该构型结构设计巧妙,又能够得到较大转矩输出,使商用车转向轻便灵敏。
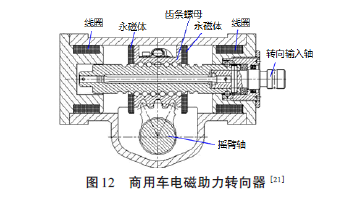
(3) 电磁助力电动转向器
如图12所示,电磁助力电动转向器在转向输入轴上设置齿条螺母,该齿条螺母总成与设置在壳体总成内的齿扇摇臂轴啮合。齿条螺母总成上设置有永磁体,在上/下盖总成上分别设置有与永磁体相对应的直流电磁线圈。在转向输入轴上设置有传感器。转向器ECU根据转角、转速和转矩等信息,给直流电磁线圈输入不同方向和强度的电流,利用磁极同性相斥、异性相吸的特性,实现齿条螺母的移动,带动齿扇摇臂轴转动,从而实现助力转向。
随着自动驾驶技术的发展,对线控转向的安全冗余技术越来越重视。目前,在运营的自动驾驶示范车辆上普遍采用软硬件备份的策略满足安全冗余的要求,如采用双转向电机、双转向控制器、双传感器、双通信线路等。同时,国内外高校也在研发基于整车系统的安全冗余设计,通过各执行器之间形成交叉冗余的互补机制来实现车辆在各种部件失效工况下的整体安全冗余,以降低系统硬件成本和系统复杂度,不过该技术还未投入应用。
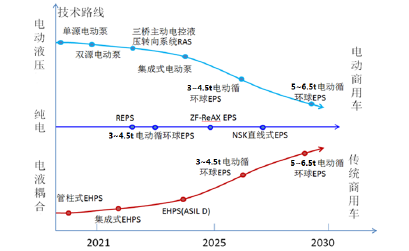
综上所述,目前商用车的线控转向技术还存在因车型载荷大小、布置位置差异(1桥或3桥等)、技术成熟度等因素而采用不同的技术路线,且每条技术路线都在向电动转向技术发展。商用车线控转向技术的总体发展趋势如图13所示。
1.2 线控制动技术
由于商用车质量大,对制动力需求大,液压制动力难以满足,同时商用车的制动出现故障时,产生的事故危害大,可靠性要求也更高,液压管路存在受热汽化风险,液压制动难以满足中、重型商用车的要求,所以商用车主要采用气压制动。但液压制动具有制动响应快、制动距离短等优点,最大总质量在6 t 以下的轻型商用车,特别是轻型客车,则采用液压制动技术。伴随着电动化和电控技术的发展,制动技术也向电控化和复合制动技术方向发展。近年来商用车线控制动技术出现了电控气压制动技术、电动液压助力制动技术、新能源电气复合制动技术和电子机械制动技术等多种型式。这些新技术不但解决了传统制动技术响应慢的问题,还明显改善了整车制动性能,具备主动控制功能,从而提升了制动安全和驾驶体验。
1.2.1 电控气压制动技术
国外对电控气压制动系统(Electronic Braking System,EBS) 研发较早,产品应用较成熟。美国WABCO 和德国KNORR 的EBS 系统已更新4 代以上,其功能已较全面,其中基本功能包括制动力分配、减速度控制、舒适停车、摩擦片均匀磨损控制、主挂车一致性控制、缓速器集成控制、制动温度监控、外部制动请求管理等;主动安全功能包括ABS、ASR、DTC、坡道起步、ESC 等;集成升级成的驾驶辅助功能包括AEB、ACC、LDWS 等。自1996 年美国WABCO 的EBS 应用在奔驰ACTROS系列商用车上算起,国外EBS 市场化应用20多年,技术成熟,性能稳定可靠,市场占有率90%以上。这主要得益于他们开展了较为系统的研究,如电磁阀建模仿真与动特性研究、管路气动力学特性仿真与分析、系统的延迟与迟滞特性仿真研究与控制方法、基于电控气压的ABS、ASR、ESC、ACC、AEB等主动控制功能开发以及EBS 系统特性测试技术研究。德国KNORR 的Hecker 等对重型商用车EBS 系统进行了横向稳定性控制算法开发和技术试验验证。PETERSEN 等建立了高精度的商用车EBS 模型,控制系统获得横摆角速度、侧向加速度、前轮转角、轮速和制动压力信号来进行计算分析,当判断出车辆即将失稳时,会对各轮进行制动控制,以保证车辆的稳定性,并在dSPACE 上对EBS 系统进行了硬件在环仿真验证。RAMAN等开发了商用车EBS 系统的ABS 和ASR控制算法, 并实现制动力合理分配与控制功能。YANAKIEV等开发了适用于商用重型车纵向控制算法,并结合气压系统的迟滞特性,提出了新的控制算法,通过仿真验证其效果。BARYS 等研究了制动系统气路的迟滞特性,发现其具有明显的非线性和不对称性,并基于Bouc-Wen 方法,建立了考虑迟滞特性的制动模型,分析了迟滞特性对制动距离、制动时间和制动减速度等性能的影响,并提出了改进措施。
国内EBS 相关研究起步较晚,不过目前也取得了一些成果。国产气压ABS、ASR已在商用货车上实现了规模化应用,其他功能如ESC、ACC也在小批量验证中。刘旭刚等研究了商用车EBS 用比例继动阀的动特性及控制方法,提升了EBS 系统的性能。刘杰研究了商用车EBS 的制动力分配算法、制动防抱死控制算法及横摆控制算法,并通过HIL 对在环仿真和实车试验进行了验证,结果显示制动距离减少和横向稳定性提升。ZONG Changfu等研究了EBS 的制动舒适性问题,开发了一套包括驾驶员制动意图识别、制动力分配、路面附着识别和减速度控制等的控制算法,最后通过HIL 进行仿真验证,结果表明所提算法能够明显改善商用车的制动舒适性。覃涛研究了客车EPBS 系统的时延产生构成、压力响应、执行机构动作和网络延时等,建立了响应延迟模型,并分析了其动力学特性,提出了基于观测器估计的自适应模糊PID控制方法。
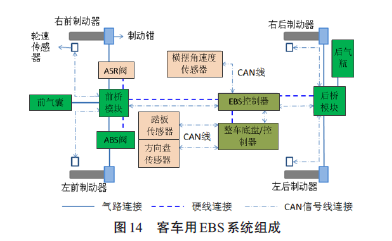
近年来,我国加大了对客运安全的重视力度。2016 年, 交通运输部发布新版法规标准《JT/T1094—2016营运客车安全技术条件》,其中要求营运客车应安装ABS、ESC系统。目前营运客车EBS系统都有ABS、ESC功能。当前广泛应用于客车的EBS 系统组成如图14所示。
1.2.2 电动液压助力制动技术
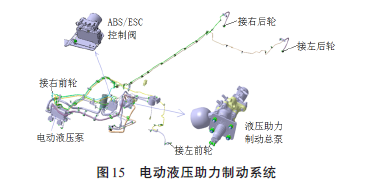
随着新能源轻型客车的发展,乘用车用电控液压制动技术已不能满足这类产品应用的需要,于是出现了电动液压助力制动技术。电动液压助力制动系统(图15) 采用电动液压泵和蓄能器为制动总泵提供制动助力,替代了真空助力泵,该助力系统助力大、响应快,制动舒适性好,在轻型电动商用车上得到应用。
1.2.3 新能源电气复合制动技术
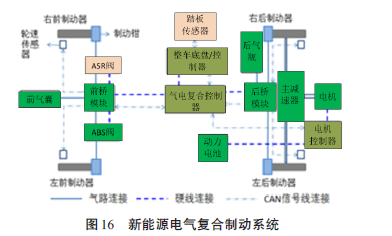
新能源电气复合制动技术,是新能源电机能量回收制动和气压制动一起作用的复合制动技术。研究在各种制动工况下如何控制二者的关系,并实现制动安全和能量的最大回收效率是近年的研发热点。吕奉阳以纯电动公交为研究对象,分析串联和并联再生制动系统的控制策略,研究其与气制动的协调控制方法, 并进行了仿真验证。胡琪舰利用AMESim建立了轮边驱动的电动客车运动学分析模型,分析了制动时能量在轮边独立驱动系统的流向,建立了轮边驱动的再生制动数学模型,并进行了仿真验证。朱为文建立了某客车7自由度的复合制动系统仿真模型,设计了再生制动控制策略和气压ABS 控制策略, 在基于Cruise、AMESim、TruckSim和Simulink 的联合仿真平台上进行了验证。卫龙龙以纯电动商用车为研究对象,提出了基于制动意图辨识的前后轮制动力分配控制策略,采用多目标优化算法,优化制动力分配,并使用Cruise 与Simulink 软件开展联合仿真,完成了复合制动控制策略的验证。目前,新能源公交车多采用电气复合制动系统,如图16所示。
1.2.4 电子机械制动技术
电子机械制动(Electro-Mechanical Brake,EMB)系统由驱动电机、减速机构、运动转换装置、制动卡钳等组成,驱动电机的转矩经过减速机构和运动转换装置传递到制动盘产生制动力矩。相较电控气压制动系统,它取消了气压泵、四回路阀、气瓶、控制阀及气路等,并且具有响应快、控制精准、布置简单等优点。目前,国内外对乘用车用EMB 技术研究较多,技术路线多样、成果丰富,而对商用车的EMB技术研究较少。2016年,王俊鼎提出了通过电流信号识别制动过程临界点的EMB 制动器间隙调整控制策略,设计了基于滑移率误差连续控制的ABS 系统,并进行了试验验证。2019 年,申锋开展了EMB驱动电机数学建模研究、电机设计和有限元分析,搭建了样机测试台架,如图17所示。其测试结果表明:设计的样机在消除间隙阶段和制动力增加阶段的制动性能满足商用车的要求。

商用车EMB 产品方面,国外瀚德集团已完成EMB 系统在商用牵引车上的整车性能试验和可靠性验证。2016年,在上海成立瀚德万安(上海) 电控制动系统有限公司,开始对EMB 产品进行研发及推广应用。其与国内商用车主机厂进行试装的EMB系统组成,如图18所示。

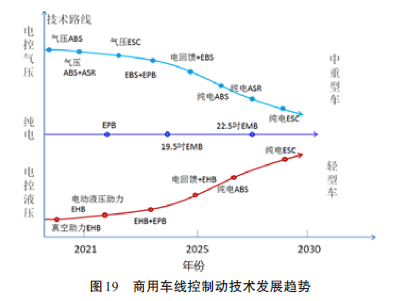
伴随智能驾驶不断升级,对线控制动的安全冗余技术的要求也在提高,从双冗余到多冗余,从功能安全到预期功能安全,以提升制动的安全性和可靠性。目前在运营的自动驾驶示范车辆上普遍采用前后轴“制动独立+驻车独立+失效预警”的策略来满足制动安全冗余的要求。国内外正在研发气电复合制动、电子机械制动EMB 等技术,支撑商用车智能驾驶实现更高层级的线控制动冗余。综上可知,目前商用车的线控制动技术依然因车型载荷差异、电回馈参与深度不同、技术成熟度等因素而采用不同的技术路线,且每条技术路线最终都向电子机械制动EMB 和ESC 技术发展。商用车线控制动技术的总体发展趋势如图19所示。
1.3 线控悬架技术
商用车线控悬架主要由变刚度气囊、变阻尼减振器以及调节车身高度的电控空气悬架(Electronic-Controlled Air Suspension,ECAS) 系统组成。其通过电子控制单元,根据车速、路况自适应调节减振器的阻尼、空气弹簧的刚度和车身高度,来提高不同行驶工况下的车辆平顺性、操纵稳定性和通过性。国外对线控悬架技术的研究比较成熟,已实现市场规模化应用。国内的研究也取得较大进展:包丕利对ECAS 系统的电磁阀阀门开关的时间与充气时间进行研究,根据系统需要,确定了空气悬架系统的CAN 总线网络拓扑结构和控制策略,并搭建了空气悬架电控系统试验台架,对控制策略进行了验证;王炳结合某9 m客车气囊悬架,编制模糊控制算法对气囊刚度进行调节,并在B级路面上进行了整车测试验证,结果表明车辆乘坐舒适性明显提高;周彤应用牛顿力学、流体力学和热力学理论,建立了空气弹簧的数学模型,根据车速变化对ECAS 模式自主切换,并通过设定阈值方法解决频繁切换的问题,然后采用增量式PID控制方法实现对气囊高度的有效控制。刘超采用混杂模型预测控制算法对整车7自由度模型空气悬架进行调节控制,提出动态延时与双误差带控制策略, 保证了车辆的平顺性和稳定性。郭耀华开发了线控悬架实物在环系统并研究了其时滞特性和稳定性,为线控悬架控制系统的开发提供了试验测试设备。郭耀华等发明了一种适用于商用车的防侧翻主动干预控制方法和系统,结合车辆所处道路的实际情况以及车辆本身的相关数据进行主动干预的判断和控制,大幅提升商用车的抗侧翻性能。客车所采用的线控悬架系统如图20所示,其传感器信号包括加速度、气囊高度等,通过CNA总线传递给线控悬架控制器,控制器对采集的信号进行运算处理,判断车辆行驶状态,发送指令来控制悬架刚度、阻尼及车身高度,从而提高汽车行驶平顺性和操纵稳定性。