六轴位移台参数解读
六足运动平台在运动控制领域有着悠久的应用历史,但近年来,传统的6自由度(6-DOF)定位设备在面对行业对更高精度、更高可重复性和更好的几何性能的需求时显得有些不足。现对一些ALIO位移台参数细节做一些解读,以便您理解ALIO六自由度位移台对于传统六足位移台的提升。
准确度(accuracy)
准确度是指在特定三维空间中,实际位置与通过测量设备测量的位置之间的差异。对于测量设备而言,准确度受到反馈机制(如ALIO六轴位移台的光栅尺增量编码器)、驱动机构(如滚珠螺杆、导杆、线性电机)以及轴承路径的准确性的影响。
重复度(Repeatability)
可重复性被定义为在相同条件下,系统重复地被命令到同一位置时所达到的位置范围。单向可重复性通过从一个方向接近该点进行测量。双向可重复性是测量系统能够从两个方向返回到该点的能力。
分辨率(Resolution)
分辨率被定义为系统的最小可识别位移量。也分辨率由反馈装置确定。
最小步长
(Minimum Incremental Step Size)
被定义为系统的最小可行移动量,也被称为步进大小。
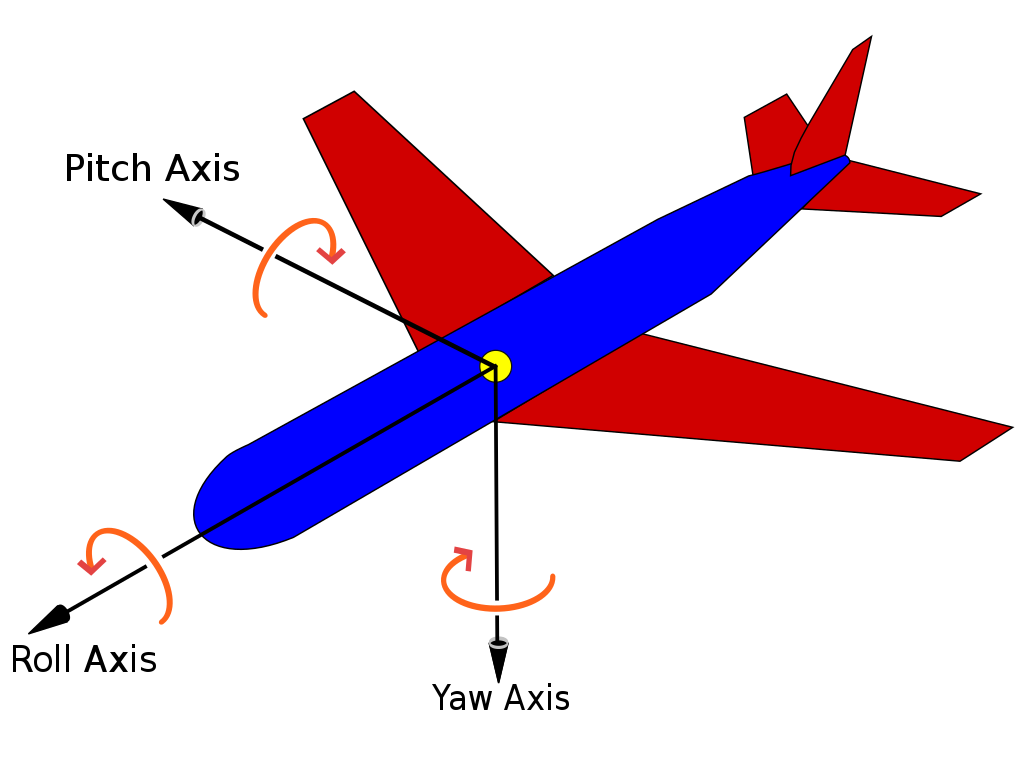
俯仰(Pitch)
被定义为系统的最小可行移动量,也被称为步进大小。
俯仰是围绕水平平面上与行进方向垂直的轴的旋转。如果所测量的感兴趣位置不位于旋转中心,则俯仰旋转会引起两个维度上的阿贝误差。对于X轴,俯仰旋转会在X方向和Z方向上引起阿贝误差。对于Y轴,俯仰旋转会在Y方向和Z方向上引起阿贝误差。这些误差的大小可以通过将偏移距离的长度乘以旋转角度的正弦值和1减旋转角度的余弦值来确定。
横滚(Roll)
横滚是围绕与行进方向平行的水平平面上的轴进行的旋转。如果所测量的感兴趣位置不位于旋转中心,则横滚旋转会引起两个维度上的阿贝误差。对于X轴,横滚旋转会在Y方向和Z方向上引起阿贝误差。对于Y轴,横滚旋转会在X方向和Z方向上引起阿贝误差。这些误差的大小可以通过将偏移距离的长度乘以旋转角度的正弦值和余弦值来计算。
偏航(Yaw)
偏航是围绕与行进方向垂直的垂直平面上的轴进行的旋转,即Z轴。如果所测量的感兴趣位置不位于旋转中心,则偏航旋转会引起两个维度上的阿贝误差。对于X轴或Y轴台。
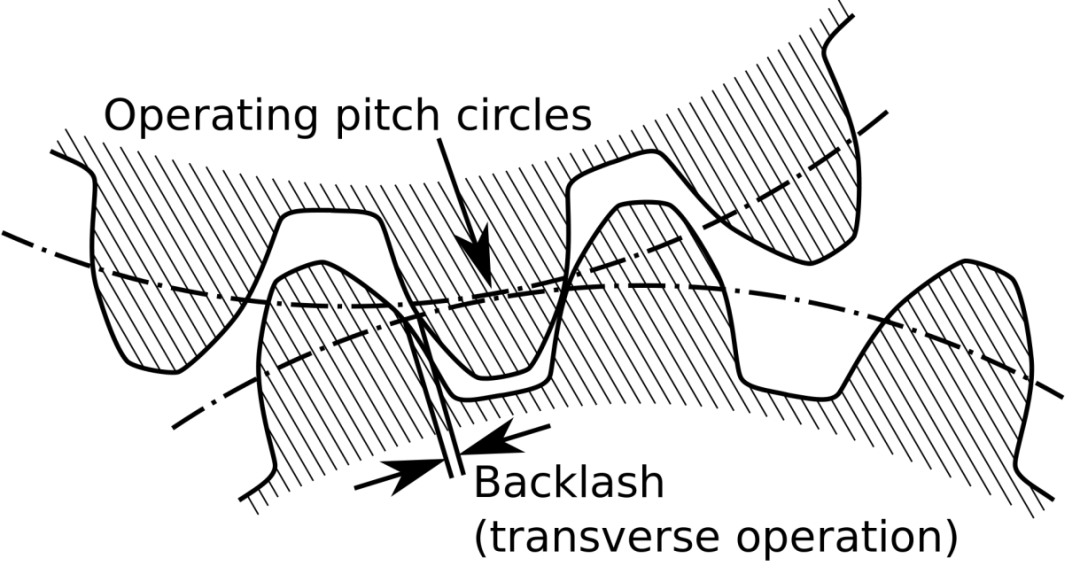
回程误差(Backlash)
回程误差是由行进方向反转引起的定位误差。反向间隙是在行进方向反转时不会产生位置变化的指令运动部分。反向间隙是由传动系中元素之间的间隙引起的。随着间隙的增加,产生运动所需的输入量也会增加。间隙的增加导致反向间隙误差增加。反向间隙也会影响双向可重复性。ALIO位移台从系统设计上避免万向节消除了回程误差,大大提升位移台整体性能。
直线度(Straightness)
直线度是指在水平平面上,相对于行进方向的真实行进线路的偏差。平整度是指在垂直方向上,相对于行进方向的真实行进线路的偏差。对于ALIO位移台,直线度和平整度参数都与位移台的安装表面有关,请联系昊量光电了解详情。
跳动(runout)
跳动是旋转机械系统的不准确性,特别是工具或轴没有完全与主轴线一致地旋转。例如;钻孔时,由于钻头偏心旋转(离轴而不是成一直线),跳动会导致孔大于钻头的标称直径。对于轴承,跳动会导致机器振动并增加轴承负载。
跳动有两种主要形式:
径向跳动(Radial runout):由于工具在平行于机器轴线的情况下发生平移,径向跳动沿机器轴线的各个点测量结果相同。
轴向跳动(Axial runout):由于工具或零件与轴线有角度,导致工具(或轴)尖端相对于基准位置偏离中心旋转。轴向跳动的大小取决于测量点与基准位置的距离。
ALIO的6-D 纳米精度工作台的核心是串联和平行运动学的结合,这使得传统的六足运动学过时了,在精度、路径性能、速度、刚度和更大的工作范围(几乎无限的XY行程,完全可编程的工具中心点位置)方面都有数量级的改进。
ALIO的Hybrid Hexapod具有小于100纳米的3维6轴点精度重复性,使其成为激光加工、光学检测、光电子、半导体、计量和医疗设备领域以及所有微加工项目的关键任务应用的关键技术。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。