什么是伺服电机?伺服电机是如何构造的?伺服电机的应用有哪些?
什么是伺服电机?
伺服是一种电磁装置,利用负反馈机制将电信号转换为受控运动。基本上,伺服系统的行为类似于执行器,提供对速度、加速度和线性或角度位置的精确控制。它由四件事组成:直流电机、位置传感器、齿轮系和控制电路。与电机连接的齿轮机构向位置传感器提供反馈。
如果伺服的电机由直流操作,则称为直流伺服电机,如果由交流电操作,则称为交流伺服电机。伺服电机的齿轮通常由塑料制成,但在大功率伺服系统中,它由金属制成。
伺服电机由许多公司制造,其中一些是双叶,HITECH,AIRTRONICS和JR无线电。它们在制造上相同,但在连接器类型、电线颜色等方面不同。市场上有多种类型的伺服器可供选择,交流,直流,连续,位置和线性伺服电机。
伺服电机的类型
在轮换的基础上
位置旋转舵机:位置舵机可以在大约一半的圆圈内旋转轴。此外,它还具有保护旋转传感器防止过度旋转的功能。定位伺服器主要用于四肢、机械臂等许多场所。
连续旋转舵机:连续舵机在结构上与位置舵机相似。但是,它可以顺时针和逆时针方向移动。这些类型的伺服器用于雷达系统和机器人。
线性舵机:同样,线性舵机也像定位舵机,但带有额外的齿轮来调整输出从圆形到来回。这些类型的伺服器用于高级飞机,在商店中很少见。
基于运行信号
还使用两种类型的伺服电机,它们在处理信息和信号方面有所不同。
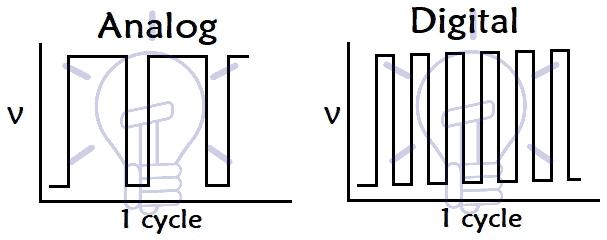
1.模拟伺服电机
模拟伺服器通过PWM(脉宽调制)信号运行。并且,信号范围为4.8V至6V。在这种类型的舵机中,当舵机静止时,PWM 关闭。静止时产生的扭矩使启动时间处于非活动状态。此外,模拟伺服器每秒只能发送 50 个脉冲。
2****数字伺服电机
使用小型微处理器数字伺服接收信号并作用于高频电压脉冲。数字舵机每秒可以发送300个脉冲,与模拟舵机相比非常高。由于脉冲更快,数字舵机可提供平稳的响应和一致的扭矩。数字舵机比模拟舵机消耗更多的功率。
基于运行功率
1.直流伺服电机
直流伺服用于提供快速转矩响应,也称为永磁直流电机或单独励磁直流电机。提供快速扭矩响应的原因是因为扭矩和流感被解耦。因此,电枢电压或电流的微小变化可以产生轴的位置或速度的显着变化。直流伺服是所有类型中最常用的伺服电机。
2.交流伺服电机
交流伺服电机有两种类型,一种是两相,第二种是三相。主要两相鼠笼式伺服电机用于低功率应用。并且,三相鼠笼式伺服用于大功率系统。
伺服电机的构造
伺服电机是直流电机,具有以下5个部分:-
定子绕组:这种类型的绕组绕在电机的固定部分。它也被称为电机的励磁绕组。
转子绕组:这种类型的绕组绕在电机的旋转部分。它也被称为电机的电枢绕组。
3.轴承:有两种类型,即字体轴承和背面 轴承 ,用于轴的运动。
4.轴:电枢绕组耦合在铁杆上称为电机的 轴 。
5****编码器 :它具有近似传感器,可确定电机的转速和电机的每分钟转数。
伺服电机机构
它由三种基本类型组成:
1.控制装置
2.输出传感器
3.反馈系统
伺服电机工作在自动闭环系统的现象上。该闭环系统需要控制器。该控制器由比较器和反馈路径组成。它有一个输出和两个输入。在这种情况下,为了产生输出信号,比较器用于比较所需的参考信号,并且该输出信号由传感器感测。电机的输入信号称为反馈信号。根据反馈信号,电机开始工作。比较器信号称为电机的逻辑信号。当逻辑差值较高时,电机将在所需时间内打开,当逻辑差值较低时,电机将在所需时间内关闭。基本上,比较器用于确定电机是ON还是OFF。 电机的正常运行可以在良好的控制器的帮助下完成。
伺服电机控制:
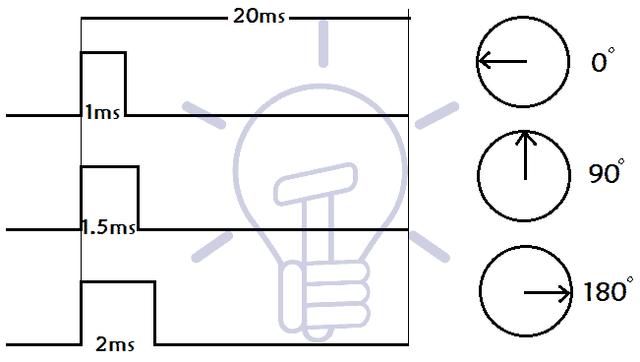
伺服电机可以通过PWM方法控制,即脉宽调制。它们向电机发送宽度不一致的电信号。宽度脉冲在1毫秒至2毫秒的范围内变化,并在一秒钟内重复50次将其传输到伺服电机。脉冲的宽度控制旋转轴的角位置。其中,使用了三个术语来表示伺服电机的控制,即最大脉冲,最小脉冲和重复率。
例如 ,舵机以1毫秒的脉冲移动,使电机向0°转动,而以2毫秒的脉冲将电机向180°转动,在角位置之间,脉冲宽度自行互换。因此,伺服以宽度为90.1毫秒的脉冲转向5°。

每个伺服电机中都有三根电线或引线。两根线使用正电源和接地电源,而第三根线用于控制信号。
伺服电机的工作原理
伺服具有位置传感器,直流电动机,齿轮系统,控制电路。从电池获取电力时,直流电机以高速和低扭矩运行。该速度较低,扭矩将高于连接到直流电机的齿轮和轴组件。轴的位置由位置传感器从其确定位置进行感应,并向控制电路提供信息。信号由位置传感器的控制电路解码,并处理旋转方向以获得正确的位置。它需要4.8 V至6 V的直流电源。
减速齿轮箱连接到一个轴上,该轴会降低电机的转速。减速齿轮箱的输出轴与与编码器或电位器连接的电机相同。然后将编码器的输出连接到控制电路。伺服电机的电线也连接到控制电路。电机通过微控制器通过PWM的形式发送信号进行控制,PWM解码控制电路以所需角度旋转电机,控制电路沿顺时针或逆时针方向移动电机,这样轴也沿所需方向旋转。编码器将反馈信号发送到控制电路。当电机达到所需角度时,控制电路会根据从编码器接收的信号相应地停止电机。
例如,如果电机处于30°,并且微控制器为电机提供60°的角度,则控制电路沿顺时针方向旋转电机。当电机达到60°时,编码器向控制电路发送信号以停止电机。
伺服电机的应用
以下是一些用于在伺服器上方或过度旋转时控制速度的应用程序:
它们用于控制无线电遥控飞机中电梯的定位和移动
它们因其平稳的开关和准确的定位而在机器人的机器人信息中发挥着重要作用。
它们用于液压系统中,以维护航空航天工业中的液压油。
在无线电控制玩具中,也使用这些。
它们用于扩展或重播电子设备(如 DVD 或蓝光光盘播放器)中的光盘托盘。
它们用于保持汽车工业中车辆的速度。
伺服电机的优缺点
优势:
当我们在电机上施加重负载时,驱动器将增加电机线圈的电流,因为它试图旋转电机。
在伺服电机中,高速运行将是可能的。
弊:
成本会更高。
伺服电机不适合对旋转进行精确控制,因为伺服电机试图根据命令脉冲旋转,但滞后。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。