汽车电子电气架构设计仿真解决方案
导读
本文将介绍面向服务(SOA)的汽车TSN网络架构,并探讨RTaW-Pegase仿真与设计软件在TSN网络设计中的应用。通过RTaW将设计问题分解,我们可以更好地理解汽车电子电气架构设计的过程。
01 汽车E/E架构设计所面临的挑战
面向功能信号→面向服务(SOA)的转变
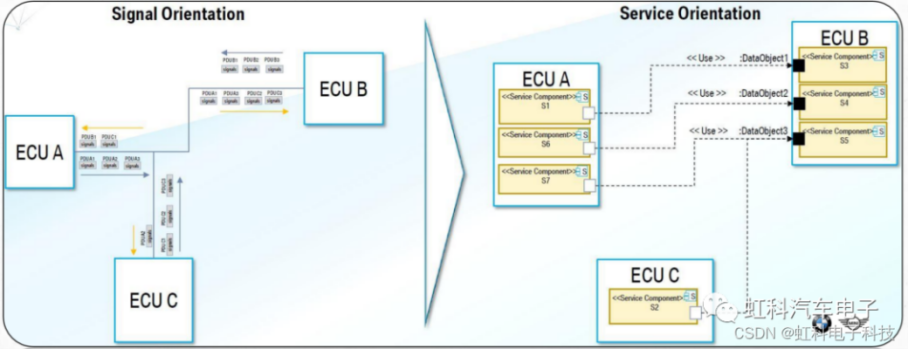
随着智能网联、自动驾驶、电动汽车的发展,软件、计算能力和先进的传感器正逐渐立于统治地位。这一变革也促使汽车E/E架构从以信号导向,变为以运算平台为基础、面向服务(SOA)的架构。
架构设计导向转变
SOA的架构有以下优势:
更易维护: 建立在以 SOA 基础上的信息系统,有着清晰的分层架构。当需求发生变化的时候,不需要修改提供业务服务的接口,只需要调整业务服务流程或者修改操作即可,整个应用系统也更容易被维护。
清晰的分层架构

高可用性: 该特点是在于服务提供者和服务使用者的松散耦合关系上得以发挥与体现。使用者无须了解提供者的具体实现细节。
松散的耦合关系
通过模块化实现SW和HW的扩展性和可复用****
模块化架构
模块化的隐私和信任: 横跨整车的各个边界,各个模块的角色、能力以及权限必须能够实现集中管理。
模块化安全性的需求: 需要建立故障控制区的模拟化安全库,必须能够保证某些区域发生错误不会跨模块传播。

持续高成本投入的集成和测试
执行路径及时间
-整个系统的持续部署和测试,需要更关注自动化测试;
-越复杂的系统在虚拟平台上的早期验证和确认是关键;
-测试覆盖率必须以可变性和验证的执行路径来衡量,不只是以公里数来驱动。
汽车全生命周期软硬件的可扩展性
如何面对场景不断优化
面向服务( SOA )的转变: 大数据和人工智能算法用于关联许多现有的各种设计规范;
满足模块化的特性: 集中式安全模型的传递性信任算法,故障遏制区域内故障概率的数学模型及其产生的 "模块错误率";
高投入的集成、测试: 设计复杂性指标和测试覆盖率计算器;以不同的精度模拟 "全栈 "系统行为,可能插入真实的组件进行软件在环或硬件在环测试案例,以建立对整个系统的信任。
02 面向服务(SOA)的汽车TSN网络架构
RTaW-Pegase:用于TSN网络全面的仿真与设计软件
RtaW的工作流程
**RTaW-Pegase® : **是汽车通信网络架构的建模、自动配置和仿真,支持汽车全生命周期的设计选择和验证的解决方案。

RtaW的主要优势
基于TSN的仿真案例(BMW)****
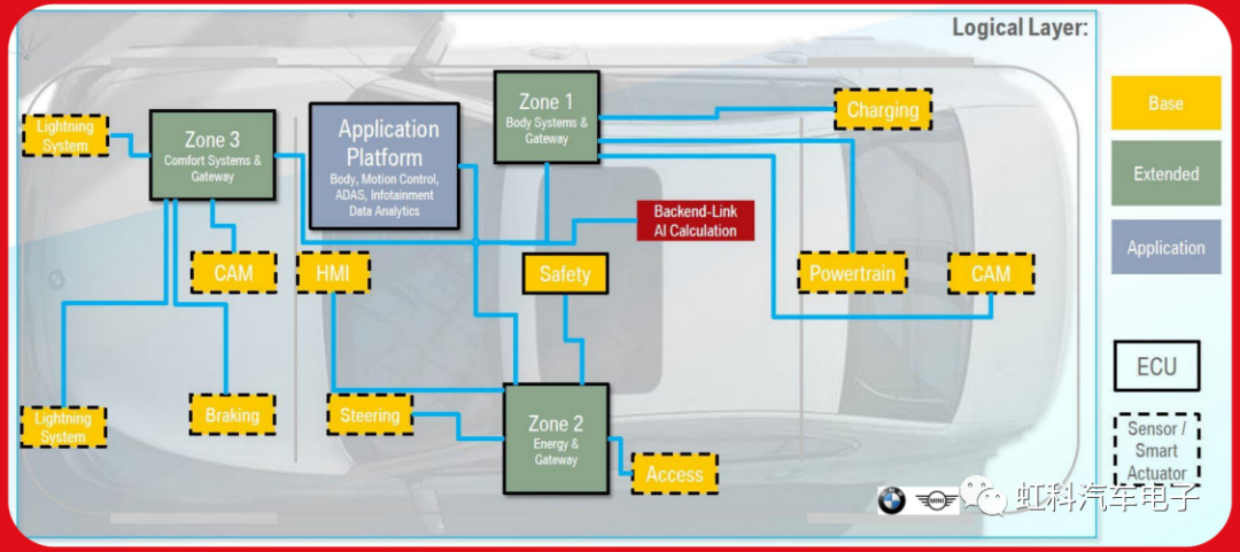
SOA架构原型
-中央计算平台+域控制的分布;
-冗余的中央计算机(应用平台):车身、运动控制、数据分析、安全、ADAS;
-3个域控制器;
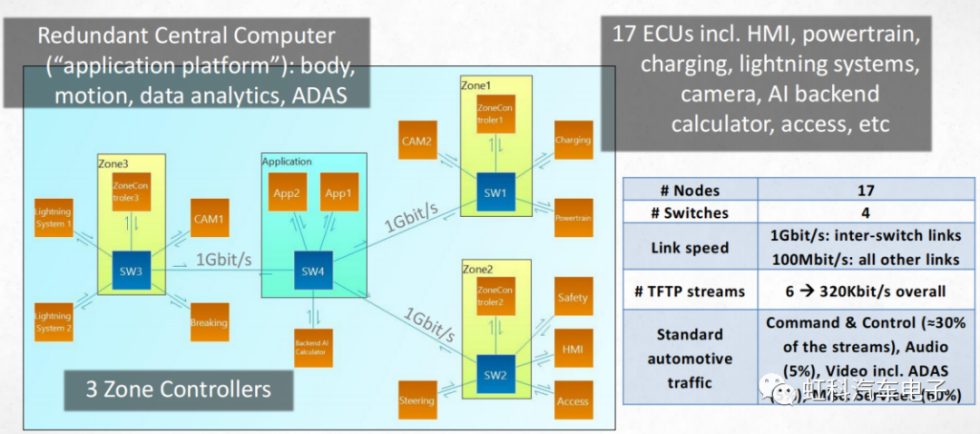
-17 个 ECU 节点:HMI、动力系统、充电系统、摄像头、人工智能后端计算器、接入点等。
RTaW下的网络模型
使用RTaW-Pegase软件仿真构建SOA架构原型,并进行链路仿真与流量分析。
RTaW将设计问题分解
RTaW-Pegase 将我们关注的设计问题进行分解分析:
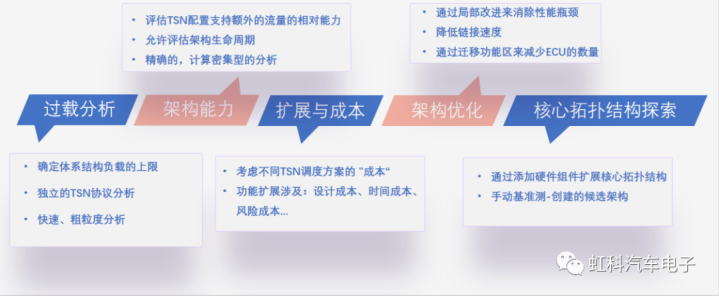
RTaW问题分解

过载分析
部署新服务时网络过载概率
架构能力分析
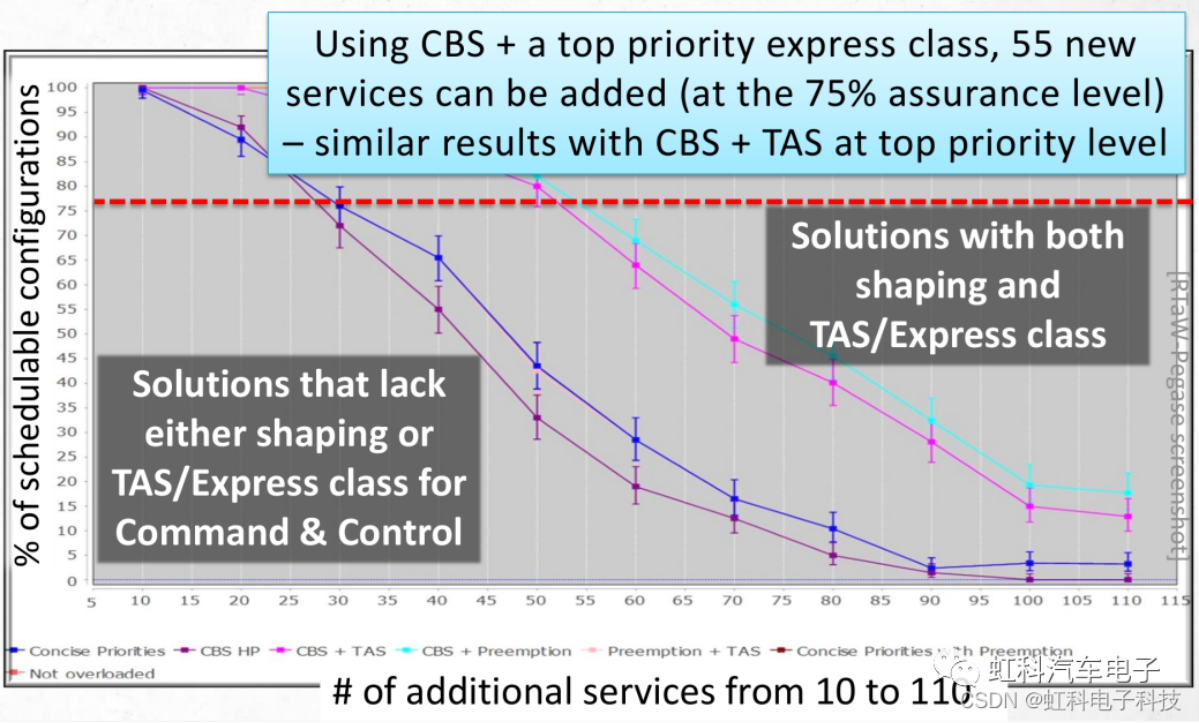
基于TSN QoS的网络可扩展性
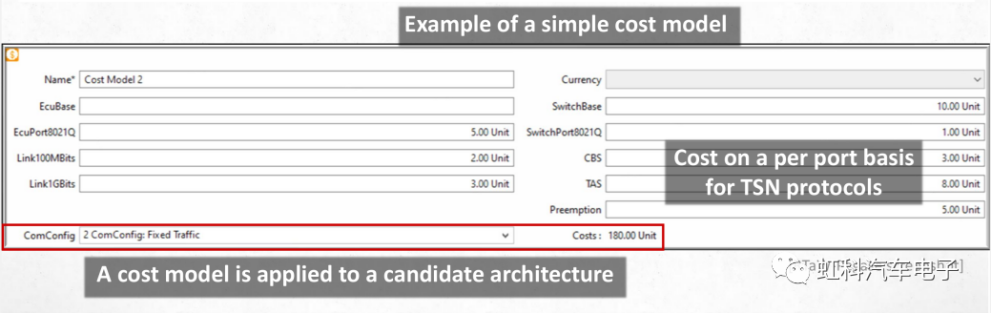
扩展与成本分析
成本模型
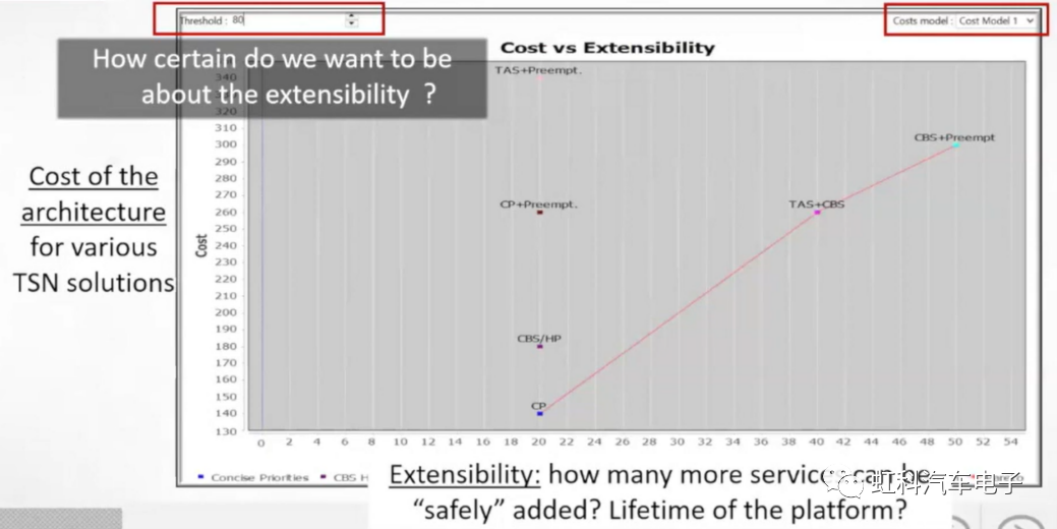
架构优化
基于 CPU 性能的网络可扩展性
核心拓扑结构探索
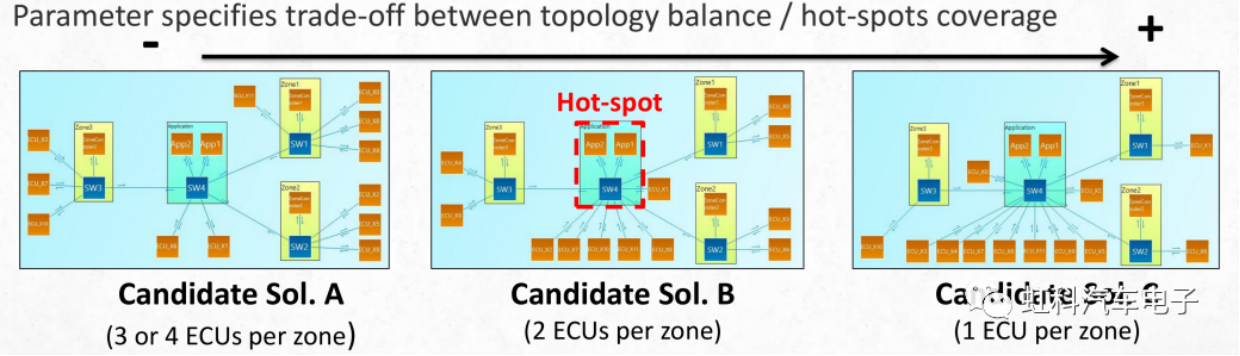
基于核心拓扑生成体系结构
03 关于RTaW
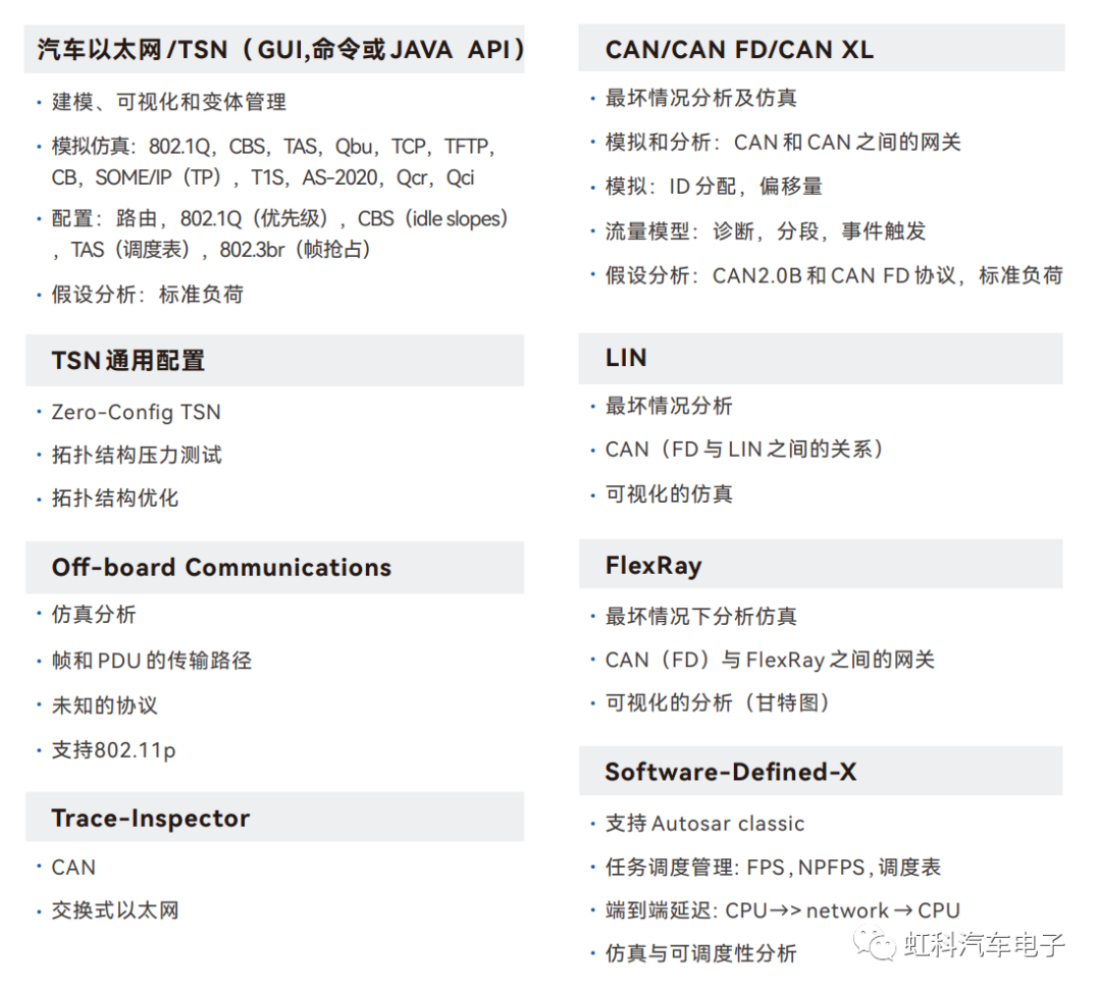
RTaW支持的功能模块
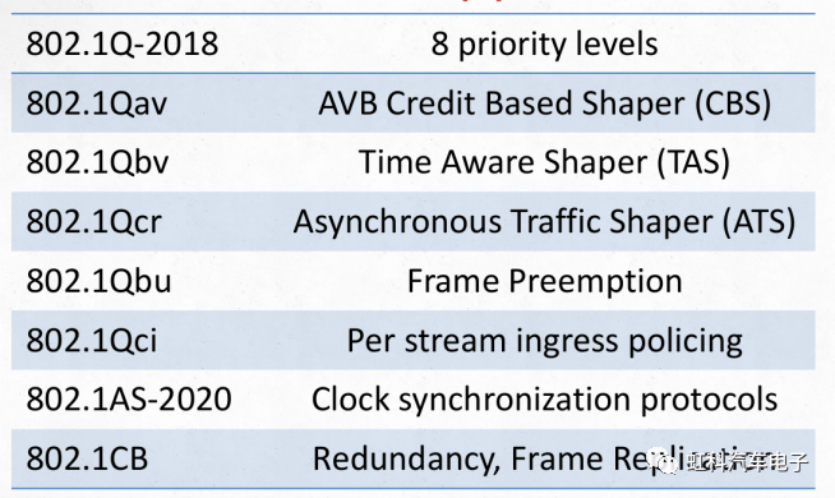
RTaW支持的TSN协议
现阶段的汽车网络架构设计使计算机辅助的 E/E 架构设计成为可能。
RTaW-Pegase 可计算性能指标,如网络负载、通信延迟和缓冲区利用率,从而有可能在所有情况下预测网络性能,并且可以比较不同的设计和配置选项,使您能够避免过度配置资源。另外,RTaW-Pegase 包括设计空间分配算法,以优化网络拓扑,数据流路由以及在工作站上分配软件功能。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。