索尼发布用于车载摄像头的CMOS图像传感器IMX735
据麦姆斯咨询报道,近期,索尼半导体解决方案公司(下称“SSS”)推出用于车载摄像头的新型CMOS图像传感器:IMX735,像素水平实现突破,高达1742万有效像素。
自动驾驶汽车为了实现系统自主地进行驾驶操作,需要提供覆盖车辆周围360°环境的先进、高精度的检测和识别性能。
因此,对于可以帮助实现这一点并支持开发出更先进的车载摄像系统的CMOS图像传感器的需求十分可观。
索尼此款新型CMOS图像传感器的像素水平实现突破,高达1742万有效像素,可以高清地捕捉远处的物体。
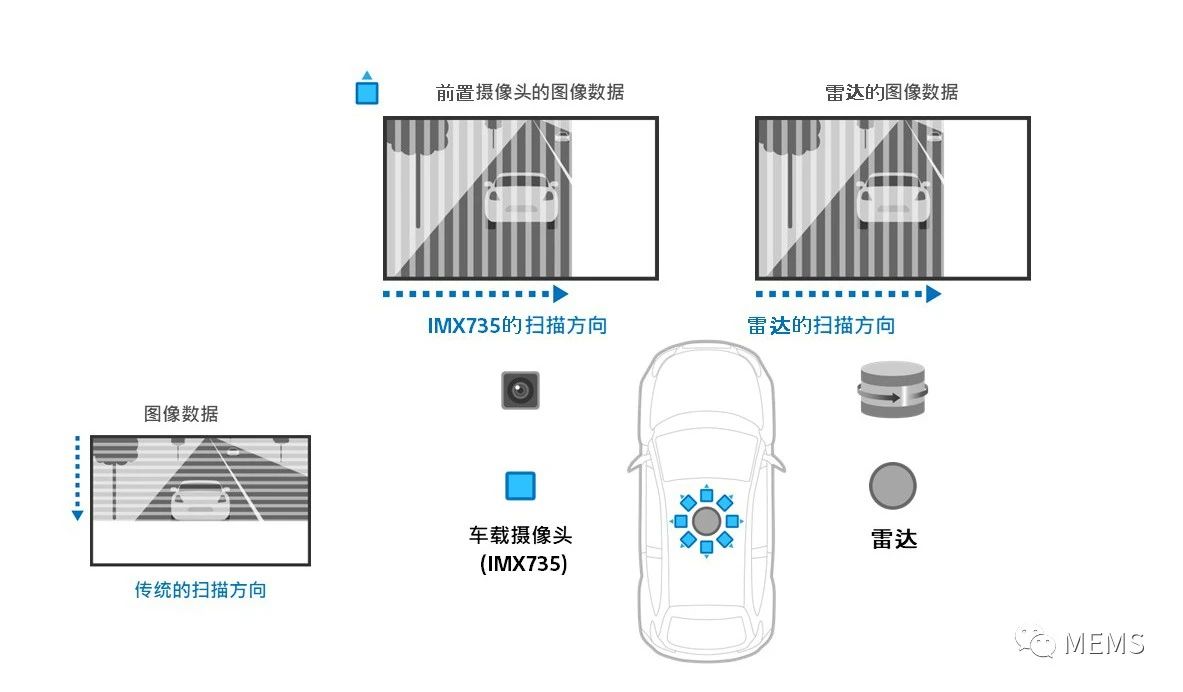
此外,自动驾驶系统通常将车载摄像头与激光雷达(LiDAR)和其他传感系统结合使用。传统的CMOS图像传感器以纵向逐行读出像素输出的信号,该新品采用逐列水平输出信号的方式。
这意味着采用该款传感器的车载摄像头可以更容易地与机械扫描激光雷达同步工作,因为机械扫描激光雷达的激光束也是水平扫描。更容易同步工作,可提高整个自动驾驶系统的检测和识别能力。
此外,该新型传感器通过索尼自研的像素结构和特别的曝光方式提升了饱和照度范围,即使同时使用高动态范围(HDR)成像和LED闪烁抑制功能,也能获得106dB的宽广的动态范围。
使用动态范围优先模式时,动态范围甚至可高达130dB。该创造性的设计有助于抑制逆光条件下的高光过曝,从而在隧道出入口等亮度差异较大的道路环境中实现更精确的目标捕捉。
主要特点
先进的1742万像素,支持远距离识别
该新型传感器的有效像素高达1742万像素,像素水平实现突破,可以高清捕捉拍摄物体,识别更远范围的物体,从而更好地支持检测路况、车辆、行人和其他物体。在驾驶过程中及早地检测到远处的物体有助于提高自动驾驶系统的安全性。
水平像素信号输出,更容易与机械扫描的激光雷达同步
CMOS图像传感器从像素读取信号时,一般会逐行纵向输出像素。而该产品采用的读出方法是水平方向逐列输出的读出方式,更容易与同样采用水平扫描方法的机械扫描激光雷达同步。
这意味着,搭载该产品的车载摄像头输出的信息可以更容易地与激光雷达收集到的信息融合。这将从整体上提高自动驾驶系统的检测和识别能力。
同时使用HDR和LED闪烁抑制功能,也能实现宽广的动态范围
在汽车驾驶中,在隧道出入口等亮度差异较大的道路环境中,也需要精确检测和识别物体。此外,在HDR模式下,车载摄像头也需要抑制LED闪烁,以应对日益普及的LED信号灯和其他交通设备。该产品采用自研的像素结构和特别的曝光方式提升了饱和照度范围,同时采用HDR和LED闪烁抑制功能,也能实现106dB的宽广的动态范围。(使用动态范围优先模式时,动态范围可实现高达130dB)。这种设计还有助于减少拍摄移动物体时产生的运动伪影。
符合汽车应用所需标准
该产品会在量产前通过AEC-Q100 Grade 2汽车电子元器件可靠性测试。此外,SSS还引入了符合ISO 26262公路车辆功能安全标准的开发流程,达到了汽车安全完整性级别ASIL-B(D)。这有助于提高车载摄像头系统的可靠性。
车载应用所需的网络安全(可选)
该产品可支持网络安全功能,例如通过公钥算法进行摄像头验证,确认CMOS图像传感器的真实性和进行图像验证,从而检测获取的图像是否被篡改,以及进行通信验证,检测控制通信是否被篡改。
主要规格

本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。