如何设计ADAS系统功能状态机(一)
1.模块概述
状态机模块的主要作用是跟踪系统的当前状态,并根据特定的事件和条件进行状态转换。它可以根据传感器数据、车辆状态和系统输入来判断当前功能的可用性和执行条件。状态机模块还能够监控系统的运行情况,及时响应来自驾驶决策或用户的指令,并根据需要触发相应的功能执行。
**状态机模块通过定义和维护一组状态,以及状态之间的转换条件和行为,确保系统在不同的场景和条件下正确地执行相应的功能。**例如,当检测到前方车辆与本车距离过近时,FCW功能会被触发,状态机模块会根据预设的逻辑条件和行为来切换到相应的预警状态,并触发声音或振动等警示措施。
状态机模块的设计需要考虑各个功能之间的优先级、依赖关系和冲突情况。它需要具备灵活性和可扩展性,以应对不同的道路情况和交通场景。比如cat-in、cat-out情景、自动变道时的变道空间判断等等。同时,状态机模块还需要具备高效的算法和实时性能,以保证系统的快速响应和可靠性。
总之,状态机模块在自动驾驶系统中扮演着决策和控制的关键角色。通过有效地管理和控制各个功能的状态转换和行为执行,状态机模块能够确保系统的稳定性、安全性和可靠性,它是实现ADAS功能的基础模块之一。
2.设计原理
状态机的设计原理是基于状态、事件和转换的概念。状态表示系统或功能在某一时刻的特定状态,事件表示触发状态转换的条件,而转换则表示状态之间的切换过程。
首先,需要定义系统或功能的各个状态。状态可以是具体的行为状态,也可以是抽象的控制状态。每个状态都代表了系统的一个特定方面或功能,例如“Standby”、“OFF”、“Parking”等。
接下来,定义触发状态转换的事件。事件可以是传感器的触发信号、用户的输入指令或系统内部的条件判断。通过检测事件的发生,状态机能够判断是否需要进行状态转换。
然后,定义状态之间的转换条件和行为。转换条件是判断是否可以进行状态转换的逻辑条件,例如满足一定的时间限制、特定的传感器数据或用户指令。转换行为是在状态转换时执行的操作,例如触发警报、调整车速或切换到下一个状态。
为了更好地设计和管理状态机,可以使用状态表和状态转换图。状态表是一个表格,列出了系统的各个状态和相应的转换条件。状态转换图则是通过节点和箭头表示各个状态和转换,直观地展示了状态之间的关系和转换规则。
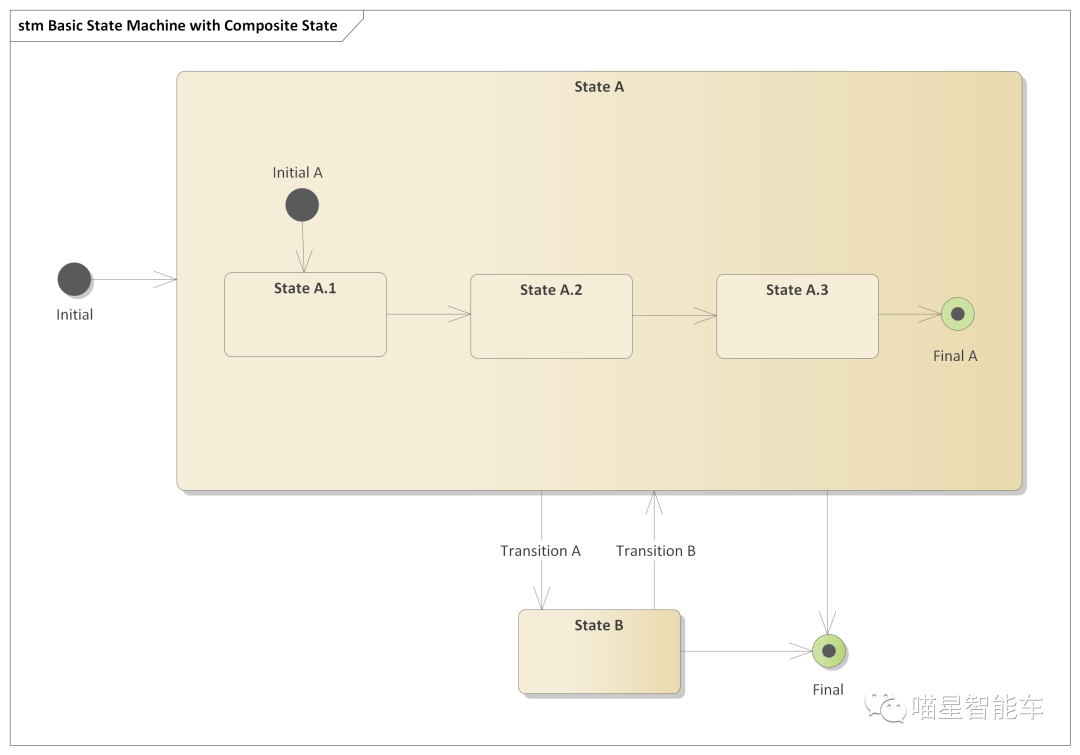
EA示例 状态转换图
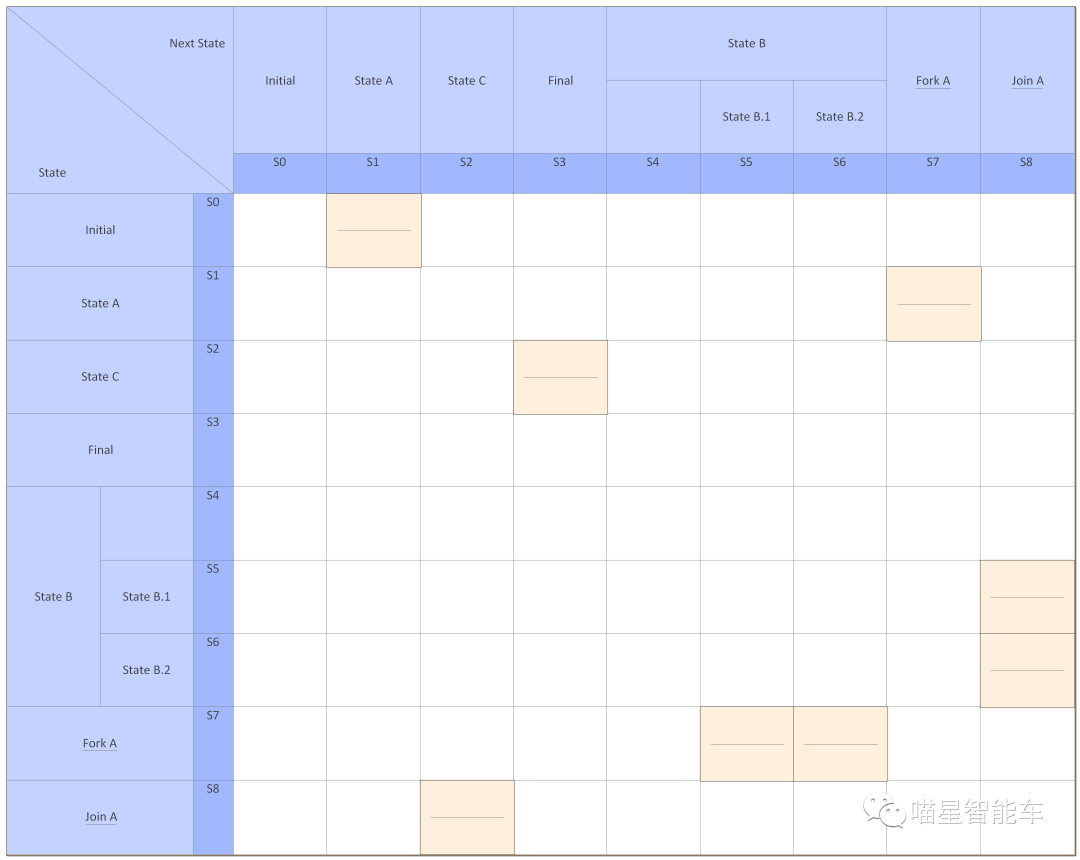
EA示例 状态表
在设计状态机时,需要确保其特性,包括确定性、完备性和可达性。
确定性表示每个状态都有明确的转换规则,不会出现歧义或冲突。
完备性表示系统的所有可能状态都被考虑到,并定义了相应的转换规则。
可达性表示系统能够从任意初始状态达到目标状态,确保状态机的可靠性和稳定性。
通过使用状态机的设计原理,可以清晰地定义系统的各个状态和转换规则,确保系统在不同的条件下正确地执行相应的行为和功能。同时,状态机的设计原理也为系统的扩展和维护提供了便利,使得系统能够适应不断变化的需求和环境。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。