基于PLC的汽车主副油路流量控制的研究
1.引言
随着工业信息化时代的不断发展,PLC控制在信息自动化领域中起到很大的作用,PLC对流量的控制技术运用越来越广泛,生产中始终占有相当的比例。matlaB在图像处理,数据建模,信号分析仿真中也有着得天独厚的优势,由于资金条件有限和本着研究开发的态度大多采用仿真来进行模仿。而对于喷雾角的角度测量,大多采用摄像对比的方式,而不经过matlaB图像处理,本文直接把得到喷嘴喷雾图像经行摄影,经过图像采集卡,通过matlaB进行处理,与不经过图像处理的喷雾图像进行对比,获得的效果更好,精度更高,更能满足经济效益的要求,本文主要介绍PLC选择,控制电路的设计,matlaB系统仿真实现分析,先通过电机链接变频器,在主油路上安装流量计,流量变送器传输到PLC,给定一个流量,此流量设定是可以任意变化的,在主油路喷嘴处设置压力表,观察喷油过程压力变化,达到参数标准。
2.PLC的选型及流量控制
2.1 PLC选型
系统的选型:PLC控制器一台,变频器两台,触摸屏显示器,泵两台。
根据系统的选型和控制的要求,PLC主要负责整个系统的温度,压力,流量调节。
所需要的资源如下所示:
数字量输入点(DI):PLC启动和停止,油泵1、2启动和停止,变频器1、2启停,共计:10点;数字量输出点(DO):流量阀动作线圈,量杯处阀动作线圈,冷却转向阀,共计:6点;模拟量输入点(AI):压力信号:主副油路各1点,主副油路单件各1点,流量信号:
主副油路各1点,单件各1点;温度信号:
温控器处1点;共计:9点;模拟量输出点(AO):变频器1、2共计:2点;综合上述:
PLC需要控制的系统数字量输入输出点DI/DO为10/6.模拟量输入输出点AI/AO为9/2.
根据控制系统实际所需端子数目,考虑PLC端子数目要有一定的预留量,因此选用的S7-200型PLC的主模块为CPU224,由于还需要扩展模拟模块,选用三个外扩模块模拟模块EM235.
2.2 流量控制
本实验主要通过主副油路两个部分进行实验,试验使用的为航空煤油,实验条件为25°C左右,喷嘴为20个,主油路单独试验,单个喷嘴流量控制,20个喷嘴同时开启流量控制,然后对喷嘴喷出的油进行角度控制,喷洒角度控制在两度范围内。同理副油路也是如此控制进行单独试验,本实验由于主副油路同时进行试验,可能会存在流量的不稳定情况,而PLC的PID控制恰恰可以弥补这一点。
采用PID,具有以下优点:(1)增量算法控制误动作影响小。(2)增量算法控制易于实现手动/自动无扰动切换。(3)不产生积分失控,易获得较好的调节品质。

流量控制系统通过安装在管道的流量变送器实施测量油的流量,并将其转化为4-20mA的电信号,然后通过PLC的A/D转化模块读取测量值并与设定值进行对比,偏差值进行PID运算,在将运算后的数字量转化为模拟量作为变频器的输入信号,控制变频器的输出频率,从而控制油泵电机的转速。
3.PID流量控制
3.1 PID控制的原理
PID控制器是用输出y(t)和给定r(t)之间的误差的时间函数e(t)=r(t)-y(t)的比例, 积分, 微分的线性表示, 构成控制量u(t),称为比例(Proportional)积分(Integrating)微分(Differentiation)控制,简称PID控制。在实际的应用中,可据受控对象特性和控制要求,灵活地采用不同的线性控制组合,构成比例(P)控制器:

式中p K --比例放大系数;TI--积分时间; D T --微分时间。
3.2 PID控制的作用
比例环节能迅速反应误差,从而减小稳态误差但不能消除稳态误差。比例放大环节系数的加大,会引起系统的不稳定。
积分环节的作用是,只要有足够的时间,积分控制将能完全消除误差,使系统误差为零,从而消除稳态误差。积分作用太强会使系统超调加大,使系统出现振荡。
微分控制可减小超调量,克服振荡,提高系统的稳定性,同时使系统的反应速度加快,减小调整时间,从而改善系统的动态性能。
应用PID控制,必须适当地调整比例放大系数KP,积分时间TI和微分时间TD,这样使系统达到稳定状态。
3.3 PID控制的流程
PID流量控制有一下流程:
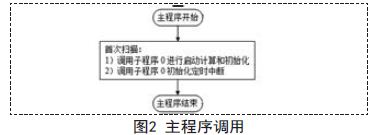
(1)主程序调用模块,如图2.
(2)主程序调用子程序1:


4.Matlab图像处理
4.1 喷雾角度测量方案确定
到目前为止,国内还没有可以测喷雾角度的传感器,所以我们选择通过摄像头来观察角度,光照形式,通过图像采集卡,经过matlaB图像处理,观察并得到喷雾角度。

喷嘴喷雾图像通过二值化得到下面的图像:

4.2 图像边缘检测及边界提取
通过得到的二值图像对其进行边缘检测,看哪种效果更好,从中选出效果最好的,进行边界提取,然后对左右边界直线做回归分析。以下是matlab处理的六种算子进行边缘检测得到的图像。

经过比较可以看出高斯滤波后Canny算子边缘检测效果要好些。经过提取数据获得两条直线。
4.3 喷嘴喷雾角的计算
由于噪声和模糊的存在,对于测量喷雾角,就是把所得两条边界线,取靠近喷嘴处的点30到60不等,然后进行数据拟合,得到两条拟合曲线斜率,程序如下:
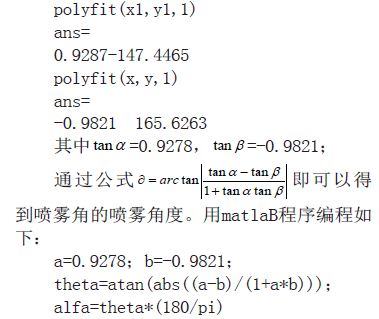
其中alfa即为所求的喷雾角角度,符合设计要求。
5.结论
本文设计主要体现PLC的PID控制,使得流量稳定的输出,并达到给定指标,通过摄像头拍摄照片使得增强了实验效果,提高了实验精度,与传统的人为眼睛观察测量误差更小,更符合实验要求,matlaB的强大图像处理功能以及运算得出喷雾角度,MATLAB编程简单易懂,通过分析数据处理数据,达到了系统所满足要求。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。