智能驾驶汽车车载网络行业发展报告分析
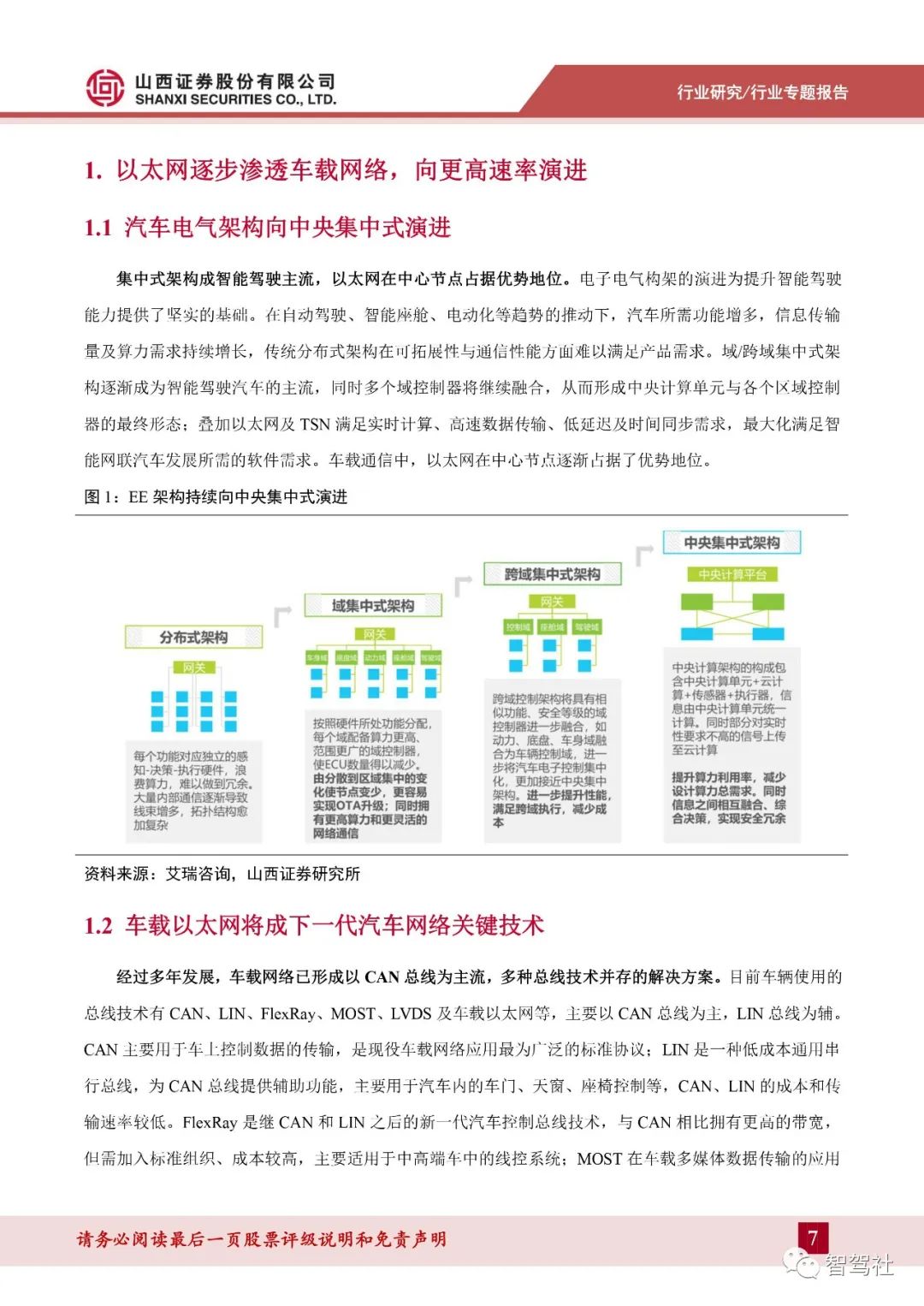
以太网逐步渗透车载网络,向更高速率演进。在汽车电动化趋势下,车内信息传输量持续提升,域/跨域集中式架构逐渐成为智能驾驶汽车的主流。传统车载网络以 CAN 总线为主,LIN 总线为辅,多种总线技术并存。车载以太网具有数据传输能力高、可靠性好、EMI功耗/延迟低、线束轻量化等优势。随着汽车智能化发展,车载以太网将率先应用于智能座舱和辅助驾驶,在未来逐步替代整车通信架构。 集中式架构成智能驾驶主流,以太网在中心节点占据优势地位。电子电气构架的演进为提升智能驾驶能力提供了坚实的基础。在自动驾驶、智能座舱、电动化等趋势的推动下,汽车所需功能增多,信息传输量及算力需求持续增长,传统分布式架构在可拓展性与通信性能方面难以满足产品需求。域/跨域集中式架构逐渐成为智能驾驶汽车的主流,同时多个域控制器将继续融合,从而形成中央计算单元与各个区域控制器的最终形态:叠加以太网及 TSN 满足实时计算、高速数据传输、低延迟及时间同步需求,最大化满足智能网联汽车发展所需的软件需求。车载通信中,以太网在中心节点逐渐占据了优势地位。
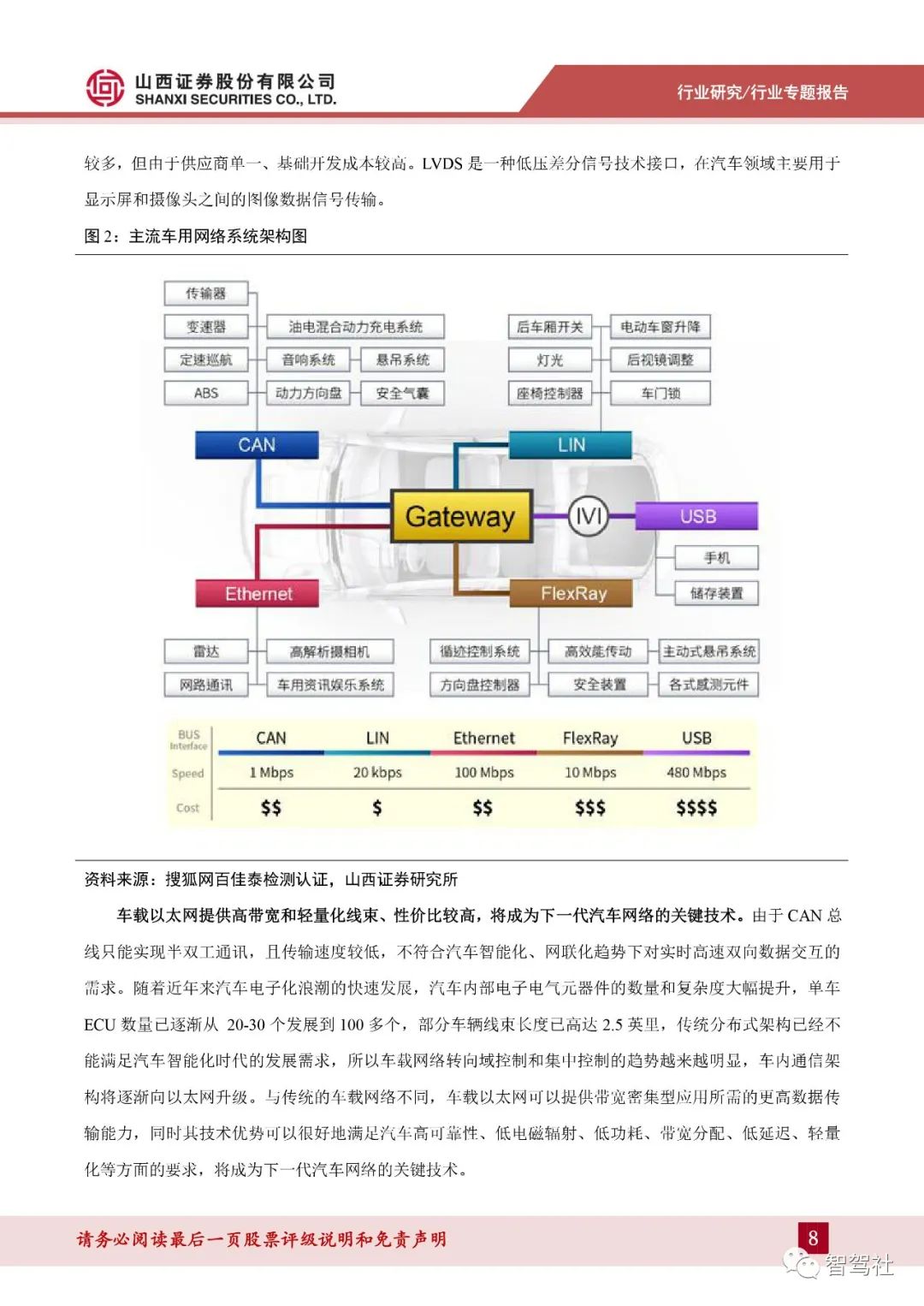
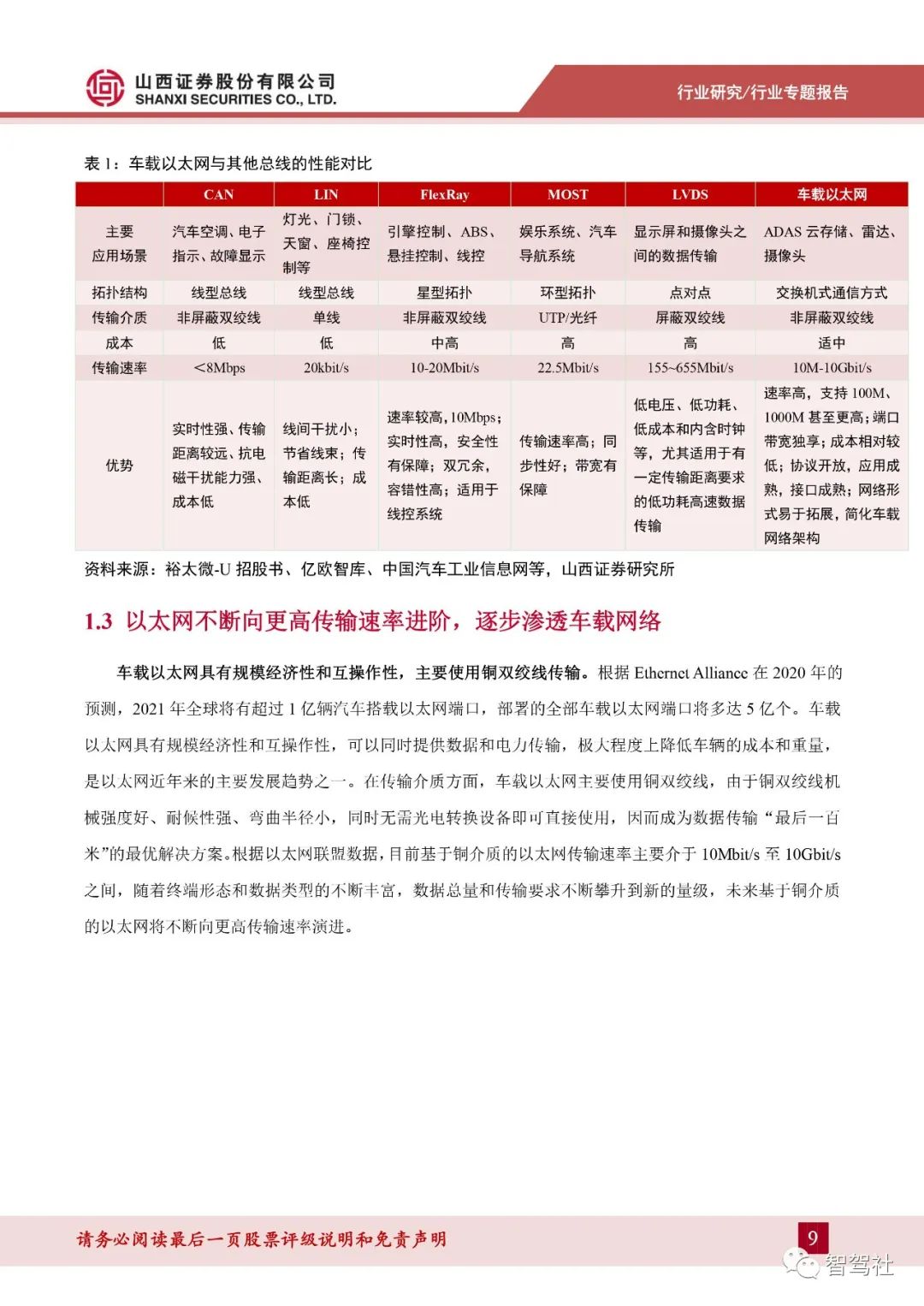
经过多年发展,车载网络已形成以 CAN 总线为主流,多种总线技术并存的解决方案。目前车辆使用的总线技术有 CAN、LIN、FlexRay、MOST、LVDS 及车载以太网等,主要以 CAN 总线为主,LIN 总线为辅CAN 主要用于车上控制数据的传输,是现役车载网络应用最为广泛的标准协议: LIN 是一种低成本通用串行总线,为 CAN 总线提供辅助功能,主要用于汽车内的车门、天窗、座椅控制等,CAN、LIN 的成本和传输速率较低。FlexRay 是继 CAN 和LIN之后的新一代汽车控制总线技术,与 CAN 相比拥有更高的带宽,但需加入标准组织、成本较高,主要适用于中高端车中的线控系统:MOST 在车载多媒体数据传输的应用较多,但由于供应商单一、基础开发成本较高。IVDS 是一种低压差分信号技术接口,在汽车领域主要用于显示屏和摄像头之间的图像数据信号传输。
车载以太网提供高带宽和轻量化线束、性价比较高,将成为下一代汽车网络的关键技术。由于 CAN 总线只能实现半双工通讯,且传输速度较低,不符合汽车智能化、网联化趋势下对实时高速双向数据交互的需求。随着近年来汽车电子化浪潮的快速发展,汽车内部电子电气元器件的数量和复杂度大幅提升,单车ECU 数量已逐渐从 20-30 个发展到 100 多个,部分车辆线束长度已高达 2.5 英里,传统分布式架构已经不能满足汽车智能化时代的发展需求,所以车载网络转向域控制和集中控制的趋势越来越明显,车内通信架构将逐渐向以太网升级。与传统的车载网络不同,车载以太网可以提供带宽密集型应用所需的更高数据传输能力,同时其技术优势可以很好地满足汽车高可靠性、低电磁辐射、低功耗、带宽分配、低延迟、轻量化等方面的要求,将成为下一代汽车网络的关键技术。







本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。