汽车ECU的内部构成与功能模块
常规功能模块
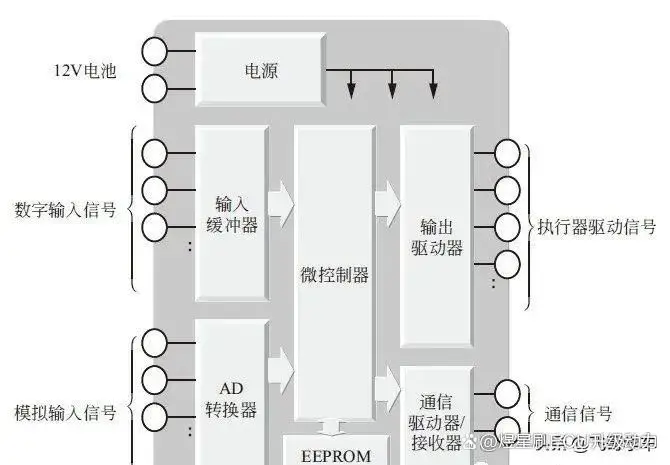
① 电源:向ECU内的各模块提供稳定的电压(5V、3V等),且与发动机舱的12V电池连接;也可用于AD转换器的标准电压,可实现较高精度。
② 输入缓冲器:将数字输入信号转换为可输入至微控制器的信号级(信号电平)。
③ AD转换器:将模拟输入信号转换为可输入至微控制器的数字值。
④ 微控制器:通过各种输入信号算出控制量并输出。
⑤ EEPROM:即带电可擦可编程只读存储器(Electronically Erasableand Programmable Read Only Memory),即使发动机停止后电源不再供电,也能存储应记忆数据的存储器。
⑥ 输出驱动器:依据微控制器的输出信号,转换为执行器可驱动的信号形态,或者增幅电压。
⑦ 通信驱动器/接收器:通信驱动器是将微控制器的输出数据转换为满足通信协议的通信信号;通信接收器是将其他ECU发送的信号转换为可输入至微控制器的信号级。
输入/输出
ECU作为与外部通信的接口,为了通过微控制器运算实现符合实际状态的最佳控制,需要检测外部状态的输入手段及实际控制驱动的输出手段。近年来为了满足多种ECU之间密切协同控制,在ECU中还设置了通信手段。

微控制器
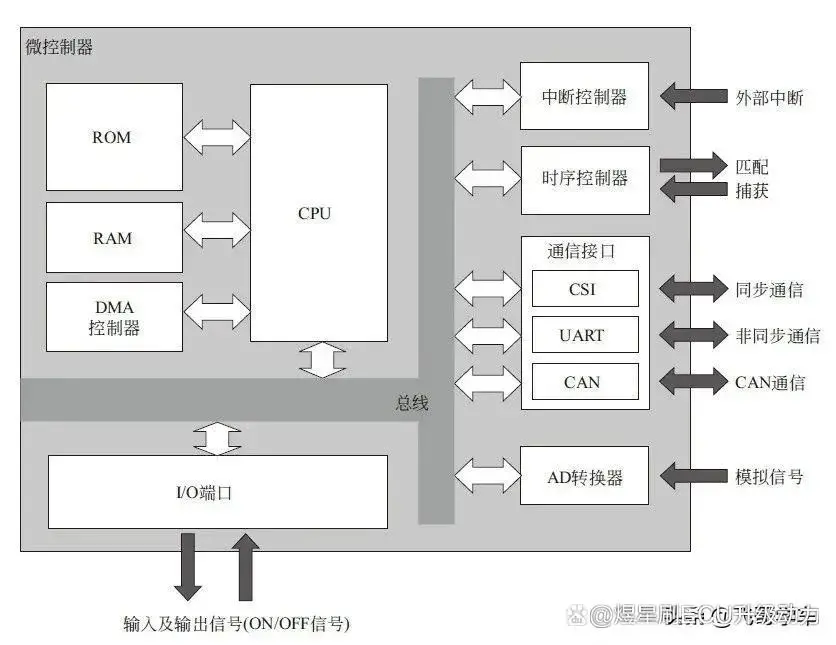
微控制器的基本构成
车载ECU中的微控制器虽然是用于车载,但其基本构成与普通的微控制器相同。
为了应对近年来的法规制度,ROM (ReadOnlyMemory,只读存储器)逐渐改变为闪存类型,可更改ROM内以模块单位记忆的内容。
时序控制器是与时间及时刻相关的控制装置。设定时刻与内部时序(计时器的数值)一致时,具有使既定输出改变的匹配功能、记忆外部信号的边缘输入时刻的捕获功能。匹配功能用于确定喷油信号输出正时等。捕捉功能与中断控制器配合,用于检测发动机转速信号输出等。
通信接口是与ECU内部的输入/输出扩展IC及其他ECU进行通信的装置。近年,为了应对车内LAN(LocalAreaNetwork,局域网),内置CAN功能的微控制器逐渐增多。
4. ECU及控制器的搭载位置
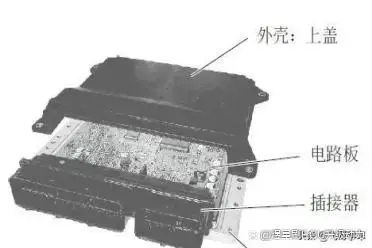
ECU根据在车辆内搭载的位置不同,其实际采用的形态也各种各样。ECU的结构设计需要与其搭载环境相对应。
汽车刚开始电子化时,由于电子元件承受热、湿度、振动等恶劣环境的能力较弱,所以将ECU搭载于环境条件较好的车室内。之后,随着包括电路板在内的电子元件的可靠性及安装技术的提升,ECU开始逐步搭载于环境条件较恶劣的发动机舱内,有些甚至直接安装在发动机上。从设计层面考虑,ECU的硬件必须能够适于安装在车辆的任何位置,也就是“自由搭载”的概念。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。